Комментарии 70
Странно, что машины приносят пользу и не ходят как лошади.
Машины могут проехать не везде. Если это не шестиколесный полноприводный внедорожник защищенный от воды конечно же.
На самом деле смотря какие машины. Подготовленные внедорожники под управлением опытного водителя могут сильно удивить. ;) И даже 6 колёс им для этого не нужно. 4х приводных с резиной низкого давления вполне достаточно. А уж что вытворяют на 2х колёсах триалисты. Рекомендую глянуть финал любого ЧМ по мототриалу. И, подозреваю, энергоэффективность их повыше будет, чем у любого шагохода.
И все-таки машины могут пробраться не везде, где может пройти-пролезть-проползти человек. Машины (в обычном понимании, а не затюнингованные до последнего болта) по горам лазить не умеют, по развалинам в случае катастроф тоже не везде пройдут.
Всему своё место. По развалинам и человек не везде пролезет. Тогда стоит переключиться на змееподобного робота? А когда речь идёт об обычных — колёсный аппарат от BostonDynamix (не помню название) опять таки более практичен (хотя он и не проще этого).
А по поводу тюнинга
1. сколько эта штука унесёт с собой груза по горам?
2. для таких вещей нужен не тюннинг, а спец исполнение, которое тюннига не требует. Вы же не требуете от обычного человека, чтобы он умел лазить по скалам, а от обычной легковушки — чтобы она могла 5 тонн груза перевезти? Универсальности ноги тоже не дадут.
3. Внезапно ничего особенного для этого и не требуется. Полный привод, крепкая рама, большие колёса и тяговитый двигатель. На что оно способно в умелых руках — гляньте rockcrowling на ютубе например.
А по скалам проще многоножкой. Там вообще никаких мозгов не нужно. Если хотя бы часть ног как-нибудь зацепится — всё нормально. И по щелям, кстати, тоже
А по поводу тюнинга
1. сколько эта штука унесёт с собой груза по горам?
2. для таких вещей нужен не тюннинг, а спец исполнение, которое тюннига не требует. Вы же не требуете от обычного человека, чтобы он умел лазить по скалам, а от обычной легковушки — чтобы она могла 5 тонн груза перевезти? Универсальности ноги тоже не дадут.
3. Внезапно ничего особенного для этого и не требуется. Полный привод, крепкая рама, большие колёса и тяговитый двигатель. На что оно способно в умелых руках — гляньте rockcrowling на ютубе например.
А по скалам проще многоножкой. Там вообще никаких мозгов не нужно. Если хотя бы часть ног как-нибудь зацепится — всё нормально. И по щелям, кстати, тоже
Триалисты наглядно показывают как заехать на кучу хлама не благодаря, а вопреки наличию двух колёс.
На самом деле — просто колёс. Топы вполне без проблем могут пройти многие трассы только на заднем (на ютубе полно роликов с Toni Bou например). Ну и колёса дают скорость, которая в некоторых случаях решает. С разгона можно иногда заехать едва ли не на вертикальную стену, да и прыгнуть сильно дальше, чем без него.
А какое, позвольте спросить, отношение имеют навыки пары чемпионов к массовому сегменту роботов?
Например те, что навыки роботов клонируются существенно легче, чем навыки чемпионов. Тем более, что я именно про прохождение трассы уровня ЧМ. Просто на заднем ездить и прыгать по узким кочкам умеет любой триалист (это основы), и далеко не только триалист (вело и мото). И в эндуро опытные райдеры могут некоторое из того-же, на совершенно не приспособленных для этого мотоциклах. Да и (при прочих равных) — точность выполнения у машин сильно выше, т.е. для них это будет проще. Собственно BostonDynamix уже сделал робота на колёсах, так что прогресс в этом направлении явно идёт.
Т.е. Вы всерьёз считаете, что балансировать, попрыгивая на одном колесе, проще, чем неспешно переставлять одну из нескольких опор, пока оставшиеся удерживают робота в состоянии устойчивого равновесия?
Во первых совершенно не обязательно на одном. Триал — это предельный случай. Например у упомянутого выше робота 2 колеса (по сути — 2 ноги с колёсами).
Во вторых — прыгать для этого (тем более в случае параллельных колёс) вообще не надо. Прыгать нужно человеку, поскольку так проще (та самая проблема тонкого контроля, которой у робота нет). А так — достаточно немного перекатываться или даже просто балансировать смещением ц.т. на заблокированных колёсах. Даже люди некоторое время с этим справляются.
Ну и никто не мешает добавить лёгкую опускаемую опору на 1 ногу, для полной статики. Речь в основном о том, что проехать так или иначе можно практически везде и это энергетически выгоднее, а часто и проще. А проблема продолжительного стояния в данном случае мне кажется не самой важной (и тем более не неразрешимой).
Во вторых — прыгать для этого (тем более в случае параллельных колёс) вообще не надо. Прыгать нужно человеку, поскольку так проще (та самая проблема тонкого контроля, которой у робота нет). А так — достаточно немного перекатываться или даже просто балансировать смещением ц.т. на заблокированных колёсах. Даже люди некоторое время с этим справляются.
Ну и никто не мешает добавить лёгкую опускаемую опору на 1 ногу, для полной статики. Речь в основном о том, что проехать так или иначе можно практически везде и это энергетически выгоднее, а часто и проще. А проблема продолжительного стояния в данном случае мне кажется не самой важной (и тем более не неразрешимой).
Речь в основном о том, что проехать так или иначе можно практически везде и это энергетически выгоднее, а часто и проще.
А как там с лестницами? Я так быстренько погуглил, нашел это, youtu.be/nIor25nMbD0?t=183, доставку торта из магазина я бы ему не доверил. И тут еще вполне нормальная лестница, с кучей места и широкими ступенями, в жилом доме было бы гораздо сложнее. Делать колёса меньше — будет хуже проходимость.
Вы выбрали самый неудачный пример. Велосипедисту по лестнице ехать очень сложно чисто физически. Разве что с разгону заехать. Триальный мотоцикл по обычной лестнице в жилом доме вполне заедет (при наличии опыта у райдера).
Пример не самый лучший, но ютуб как-то странно последнее время ищет.
Спецом для лестниц так же есть вот такие колёса. А ещё я в очередной раз упомяну робота от БД. Он может просто заблокировать колёса и зайти по лестнице обычным способом. Или заехать по ней с разгона. 20 дюймовые (как у BMX) колёса на это вполне способны.
А вот это уже совсем не триальные мотоциклы. Гораздо больше и тяжелее. На таком по обычной лестнице в жилом доме ехать, конечно, уже проблема (хотя и это вполне реально, хоть и не практично. Народ катается...) Лестницы чуть по проще в этом видео где-то в середине тоже есть.
Пример не самый лучший, но ютуб как-то странно последнее время ищет.
Спецом для лестниц так же есть вот такие колёса. А ещё я в очередной раз упомяну робота от БД. Он может просто заблокировать колёса и зайти по лестнице обычным способом. Или заехать по ней с разгона. 20 дюймовые (как у BMX) колёса на это вполне способны.
А вот это уже совсем не триальные мотоциклы. Гораздо больше и тяжелее. На таком по обычной лестнице в жилом доме ехать, конечно, уже проблема (хотя и это вполне реально, хоть и не практично. Народ катается...) Лестницы чуть по проще в этом видео где-то в середине тоже есть.
Ну вот меня такие граничные случаи и интересуют в концепции «робот с колесами». Большие колеса — хорошая проходимость, но хуже маневренность, проблемы в ограниченном пространстве (я слабо представляю, как бот будет брать разгон на площадке 1*2 метра в жилом доме), маленькие — требовательны к рельефу (роллеры на ура штурмуют лестницы, но хреновый асфальт для них — адъ и погибель). В итоге у меня складывается впечатление, что робот с обычными ногами при всех своих недостатках будет наиболее простым и универсальным.
Как уже писал выше — не стоит пытаться сделать абсолютно универсальное решение. Всё равно оно где-то упрётся в ограничения. Большая проходимость и большая манёвренность по большей части не пересекаются. А при острой необходимости проходимость решается ногами с колёсами. Совместить их не проблема.
По поводу разгона — зависит исключительно от мощности привода и способа разгона. В разгоне главное — получить импульс в нужном направлении, а сделать это можно даже с места, только мощности понадобится очень много. Триалистам хватает 30см для весьма больших прыжков. 2м для них — это как стадион. На закрытых трассах и площадок то такого размера обычно нет. Разве что перед 2х метровыми вертикальными стенами, и то не для разгона, а потому, что там уже чисто геометричеки иначе никак.
Про роллеров вы не правы. Есть мало распространённые у нас внедорожные ролики (у нас в живую видел только один раз), народ на них без проблем катается по довольно жесткому рельефу, правда ввиду отсутсвия привода — обычно только вниз. Вверх по лестнице, правда, они не проедут, только пешком (что, кстати, не так уж и сложно. проверено :))
Ну и ещё раз упоминаю возможность просто заблокировать колёса, и, в случае полной жести, просто временно перейти на шаг. Никаких технических проблем в этом нет. На внедорожных роликах, кстати, тормоза иногда есть.
По поводу разгона — зависит исключительно от мощности привода и способа разгона. В разгоне главное — получить импульс в нужном направлении, а сделать это можно даже с места, только мощности понадобится очень много. Триалистам хватает 30см для весьма больших прыжков. 2м для них — это как стадион. На закрытых трассах и площадок то такого размера обычно нет. Разве что перед 2х метровыми вертикальными стенами, и то не для разгона, а потому, что там уже чисто геометричеки иначе никак.
Про роллеров вы не правы. Есть мало распространённые у нас внедорожные ролики (у нас в живую видел только один раз), народ на них без проблем катается по довольно жесткому рельефу, правда ввиду отсутсвия привода — обычно только вниз. Вверх по лестнице, правда, они не проедут, только пешком (что, кстати, не так уж и сложно. проверено :))
Ну и ещё раз упоминаю возможность просто заблокировать колёса, и, в случае полной жести, просто временно перейти на шаг. Никаких технических проблем в этом нет. На внедорожных роликах, кстати, тормоза иногда есть.
А вы не подумали, что в жилом доме гонять роботов на колесах по лестницам — весьма странная идея? :)
Так речь о более-менее универсальном аппарате. А в жилом доме по большей части есть лифт, так что гонять кого-то по лестницам вообще странная идея. Ну а где нет — почему никому не нравится идея заблокированных колёс? Вот честно, сколько времени в % вы проводите в ходьбе по лестнице относительно всего времени передвижения? Стоит ли ради 1..2 лестниц в день городить гораздо более сложную, если с этой задачей в может справиться существенно более простая?
Ну и ещё раз повторюсь — я ничего не имею против шагающих механизмов. Мне непонятна лишь мысль делать шаг основным способом передвижения при наличии альтернатив.
Ну и ещё раз повторюсь — я ничего не имею против шагающих механизмов. Мне непонятна лишь мысль делать шаг основным способом передвижения при наличии альтернатив.
ИМХО слишком уж увлеклись антропоморфизмом. Почему обязательно двуногие роботы? Может лучше сначала решить задачу попроще, с четырехногими? Тогда отпадает необходимость в балансировке, трех точек опоры вполне достаточно, и пока одна нога перемещается, остальные поддерживают корпус. Правда я не совсем в теме, поправьте если я не прав. Просто не понимаю, почему их так упорно стараются сделать человекоподобными, и при этом же пишут статьи о том, что слишком похожий на человека робот вызывает неприятие/отвращение.
Две ноги = человекоподобное?) Пока что это просто ходилка, которую в будущем можно будет использовать для доставки груза по сложной местности например.
Четырехногого уже сделали, почему бы не сделать двуногого?
Четырехногого уже сделали, почему бы не сделать двуногого?
А такой механизм не вызывает отвращения?

Тоже не совсем понимаю, почему выбирается тип перемещения как у человека. Как-то читал и кажется на хабре, что у человека очень неудачный тип перемещения, сложный, неэффективный и крайне негативно сказывающийся на скелете и суставах. Многоножее вроде как сильно лучше. Я бы посмотрел в сторону насекомых, пайков, муравьев и тому подобных существ. У них гораздо больше возможностей для перемещения, чем у двуногих. У двуногого поломка уже одной конечности делает дальнейшее перемещение крайне сложной задачей.
Человек произошел от лазящих обезьян, поэтому такой способ крайне эффективен когда надо лазить. Подыматься по некоторым лестницам с поручнем — пример лазания.
Если быть ещё точнее, то сустав в голени, добавляющий одну степень свободы, которая отсутствует у копытных, для обхвата ствола дерева нижними конечностями — это классический пример, что мы эволюционно теряем. Вот именно с этим суставом и проблемы при беге — его можно банально подвернуть, что не сделает никогда лошадь — у неё такого сустава нет. Как говорит Дробышевский, мы идём в сторону копытных — добавляем искусственное копыто-обувь, а высоким подъёмом обуви фиксируем проблемный сустав. Так вот, о чём я — механика двух ног тоже нормальная с некоторыми оговорками и достаточной вестибуляцией. Четыре ноги — всё же избыточно. Громоздко, больше чему ломаться, а равновесие тоже держать надо. Так что, в бедре три степени свободы, в колене — одна, в ступне — две, и будет счастье. Для бега — не самый удачный тип перемещения, для маневрирования в маленьких пространствах и смена поз — пожалуй наверное лучший.
Это у копытных то отсутствует степень свободы в голени?
Мы же про этот сустав говорим?

Вы уверены, что этот сустав может вращаться в двух степенях свободы? Может я невнимательно слушал Дробышевского, всякое может быть. Извиняюсь, если ввёл кого-то в заблуждение. Ну, либо не так выразился. Если вы расскажете, что данный сустав сгибается не только вдоль лошади, а ещё и поперёк, посыплю голову пеплом, в противном случае вам придётся признать, что конкретно такой сустав у копытных отсутствует)
У двуногого робота есть несколько критичных преимуществ:
1) Компактность и соответственно возможность работы в ограниченных пространствах
2) Для последних метров доставки груза он опять таки удобнее. Так как надо выйти из машины которая предназначена для человека, открыть багажник или провести ещё какую либо операцию эргономически приспособленную для тела человека что бы донести уже до двери товар.
1) Компактность и соответственно возможность работы в ограниченных пространствах
2) Для последних метров доставки груза он опять таки удобнее. Так как надо выйти из машины которая предназначена для человека, открыть багажник или провести ещё какую либо операцию эргономически приспособленную для тела человека что бы донести уже до двери товар.
Автор статьи пытается предсказать будущее развитие на основании прошлого опыта. Все же гораздо проще — роботы будут передвигаться на антигравитационных платформах и управляться силой мысли.
Во всем цивилизованном мире предпринимается много усилий чтобы сделать наличие ног не обязательным. А в реальности это будет полезно роботам, а не инвалидам.
Похоже, что автор предполагает, что у роботов эволюционно победят птичьи ноги. Лично мне кажется, что у птичьих ног может страдать полезная нагрузка. В них нет положения, типа как у человека, когда центр масс тела совпадает с вертикальной осью, проходящей вдоль суставов и не надо прикладывать усилия, чтобы сустав произвольно не разгибался. Птицы в основной своей массе не крупные, полезную нагрузку с собой не берут, у них эта проблема не актуальна.
Не крупные это столько? Пять кило? Десять? Пятьдесят? Сто?
Есть казуары которые весят по 60 кило и ростом 1.8 вырастают, есть те же страусы 150+ кг. Эволюционировали вот, живут и бегают.
Если делать машину по примеру страуса и она будет весить кило 50 допустим, то еще 100 кило полезной нагрузки это вполне неплохо.
Есть казуары которые весят по 60 кило и ростом 1.8 вырастают, есть те же страусы 150+ кг. Эволюционировали вот, живут и бегают.
Если делать машину по примеру страуса и она будет весить кило 50 допустим, то еще 100 кило полезной нагрузки это вполне неплохо.
Предвосхищая данный ответ, написал же специально «в основной своей массе». У страуса как раз всё в порядке — можно найти фото, где он стоит с вертикально прямыми ногами, но в данной статье я вижу, что такого не наблюдается. Одно дело подсмотреть как в природе, а другое дело повторить, чтоб работало так же. Интересно вы нагрузку рассчитали, учитывая, что механика ног страуса, всё же немного иная, чем мы видим в статье.
Так одно дело найти фото, друге дело определить является ли такое положение ног нормальным т.е стоит ли так страус все время или только если ему надо приподняться чтобы что-то далекое рассмотреть например.
Так-то страусы не совсем на прямых ногах стоят
Так-то страусы не совсем на прямых ногах стоят
Заголовок спойлера



Нужен срочно специалист по страусам, чтоб рассказал, является ли это положение ног у них естественным)) На вашем фото — угол в колене пренебрежительно мал, чтоб вес страуса принудительно сгибал ноги. Но вот у робота в статье — я вижу, что этот угол чуть ли не 90 градусов в состоянии покоя. А у сервоприводов, например, на удерживание определённого угла в нагрузке тратится электрическая мощность, которую полезной в этом случае не назовёшь. Но это лишь моё мнение, основанное на том, что вижу, не более, конечно же. Автор статьи мечтает, что его роботы станут работать доставщиками и носить грузы — ему виднее, наверное.
Так судя по фото доставщик носит грузы не на себе а перед собой, в руках как человек. Тогда такой угол ног вполне оправдан, он создает противовес. То есть сам вес робота становится противовесом весу груза, если точнее.
У страуса-то основной вес (тело) прямо над ногами и центрован, а тут центр тяжести получается сильно смещен вперед.
Автор очень хочет чтобы робот был похож на человека, хотя проще и целесообразнее сделать его по принципу того же страуса — груз на спину сразу над ногами, чтобы не мучиться с балансировкой и центром тяжести.
У страуса-то основной вес (тело) прямо над ногами и центрован, а тут центр тяжести получается сильно смещен вперед.
Автор очень хочет чтобы робот был похож на человека, хотя проще и целесообразнее сделать его по принципу того же страуса — груз на спину сразу над ногами, чтобы не мучиться с балансировкой и центром тяжести.
Очень спешу разочаровать, но вектор веса из смещённого вперёд центра масс всё так же будет направлен вниз и всё так же будет нагружать сервоприводы.
Естественно, но тогда не надо будет заморачиваться с углом согнутости ног в состоянии покоя и балансом. Ведь у робота из статьи весь вес спереди, нужно или делать сложную систему противовеса или он просто будет падать вперед.
Поправьте, но я не вижу, чтобы вынос центра масс уменьшил момент силы, который будет действовать на сустав:
Заголовок спойлера

Дело не в уменьшении (вряд ли вообще получится ее сильно уменьшить), а в рационализации конструкции
Зачем городить огород когда можно сделать проще?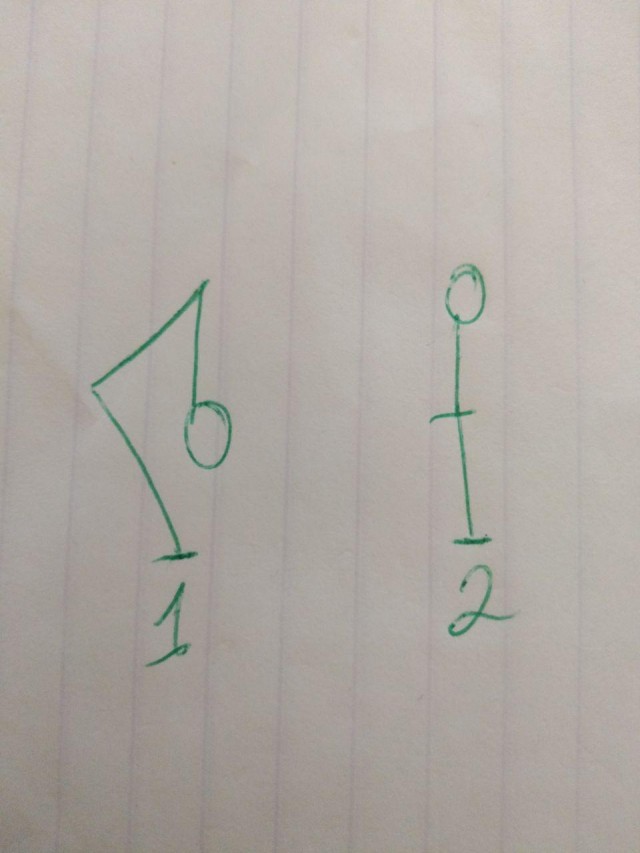

Почему же — при нулевом плече на разгибание сустава не будет действовать никакой момент сил. А это — прямая нога, и центр масс совпадает с вертикальной линией, проведённой вдоль этой ноги. Так в чём рационален вынос центра масс вперёд, если момент силы не уменьшится? Вот на вашем фото второй вариант — это как раз то, что нужно.
Так я про второй и говорю))
Автор очень хочет чтобы робот был похож на человека, хотя проще и целесообразнее сделать его по принципу того же страуса — груз на спину сразу над ногами, чтобы не мучиться с балансировкой и центром тяжести. (с)
Если задача робота развлекать людей — может хоть в форме звезды быть, но если задача носить груз то схемка 2 наиболее рациональна.И при правильном исполнении будет ничуть не менее миленькой и няшной чем человекоподобное.
Автор очень хочет чтобы робот был похож на человека, хотя проще и целесообразнее сделать его по принципу того же страуса — груз на спину сразу над ногами, чтобы не мучиться с балансировкой и центром тяжести. (с)
Если задача робота развлекать людей — может хоть в форме звезды быть, но если задача носить груз то схемка 2 наиболее рациональна.
Тиранозавры тоже были не крупные, каких-то 9 тонн
deleted, промахнулся веткой
Еще со времен «Звездных войн» меня как инженера удивляло почему роботов нужно делать на двух ногах.
— у них неустойчивое равновесие
— доступные конечности, которые можно легко деформировать и так далее.
По-сути, нет смысла в таких роботах.
На много лучше роботы из второй и третьей серий «Терминатора» — пластические, способные принимать любую форму.
— у них неустойчивое равновесие
— доступные конечности, которые можно легко деформировать и так далее.
По-сути, нет смысла в таких роботах.
На много лучше роботы из второй и третьей серий «Терминатора» — пластические, способные принимать любую форму.
А почему не 6 ног (или 4)? Если много места, то робот двигается по паучьи, расставив ноги широко. Если мало, то сдвинув вместе и подняв «тело» вверх.
Интересно, а что мешает созданию мышечных двигателей? Ну т.е. на основе каких-то волокон, сокращающихся под действием электроимпульсов. Как мне кажется, если сделать такой вариант двигателя, то и робота можно будет на раз-два сделать многоногим без затрат места на все эти сервоприводы, пневматику и движки с шестеренками.
Можно вставлю свои пять копеек? Полагаю, что теоретически ничего не мешает. А практически, наверное — отсутствие этих самых волокон. Какова должна быть их природа? Из какого материала? Какую нагрузку выдержат? И ещё много вопросов «как»? Не сомневаюсь, что направление перспективное, но как говорится, инициатива — дело наказуемое. Вы предложили, вы и отвечайте)
Видел недавно эту Кейси — ходит довольно бодро по прямой и даже по ступенькам вверх/вниз, но сильно снижает скорость на поворотах. Кстати, эти робо-ноги очень громко топают, особенно на твердой поверхности, так что «проникновение в наши дома и офисы» не останется незамеченным))
Диджит учиться ходить по разной местности и подниматься по ступеням, чтобы однажды он смог доставлять посылки прямо до двериЗвучит, будто это все задумывается для того, чтобы робот приносил мне пиццу домой. Не думаю, что такое будет. По крайней мере в обозримом будущем. Роботы дорогие для такой работы.
Интересно как происходит обучение таких конструкций. Алгоритмическое программирование или самообучение? Если нейросеть, то хотелось бы познакомиться с архитектурой и методами обучения.
Не понял только почему они двуногие. Казалось бы 4, а особенно 6 ног гораздо проще в реализации. И проходимость у них совсем не хуже чем у двуногих. Или ребята просто намеренно взялись за самую трудную задачу?
Это смотря с какой стороны посмотреть. Двуногий гораздо менее материалоёмкий, а значит легче и дешевле по материалам. И двигателей меньше и всего остального. А также компактнее по габаритам. Шестиногий размером с человека не пройдёт в дверной проём или лифт, черырёхногий пройдёт не во всякий, а двуногий пройдёт в любой. К тому же двуногая ходьба по энергозатратам эффективнее шестиногой. Ну а то, что управлять двуногой походкой сложнее — так эту сложность надо преодолеть всего один раз, а потом тиражировать готовое решение.
Да, они взялись за самую сложную задачу, но она перспективная и посильная.
Да, они взялись за самую сложную задачу, но она перспективная и посильная.
Совсем не уверен. Да, две ноги это меньше чем четыре или шесть. Зато сами такие ноги могут быть многократно сложнее. По проходимости тоже не факт. Да, возможно две ноги занимают меньше места. Но скажем надо перелезть через высокий порог. Двуногому придётся решать задачки на эквилибристику, причем ноги при этом нужны сопоставимые с человеческими. А четвероногий или шестиногий переломится в спине, закинет передние ноги на порог и подтянется. При этом каждый момент времени имея равновесие. На даче когда грибы по оврагам собираем, я всякий раз жалею, что я не сороконожка, не паук, или уж на худой конец не собака :)) Хотя возможно если ребята делают свои игрушки для какой-то очеловеченной среды, там может быть да, двуногий имеет преимущества. Просто среда изначально создана для двуногих.
Люди же лазают через заборы. Что принципиально невозможного для двуногого? Ещё раз — задачу надо решить всего один раз, потом они будут лазить через заборы в любом количестве.
Двуногость всяко будет востребована, значит пора ей заниматься.
Хотябы даже такая, прости господи, тема, как секс-куклы. Не будут же они шестиногими. А рынок потянет на миллионы экземпляров, когда они научатся двигаться.
И конечно вы правы — двуногий предназначен для среды, созданной для человека — может управлять любой техникой, которая предназначена для человека — просто сесть за штурвал самолёта или трактора или залезть в люк подлодки или ухаживать за престарелым или чего угодно.
Двуногость всяко будет востребована, значит пора ей заниматься.
Хотябы даже такая, прости господи, тема, как секс-куклы. Не будут же они шестиногими. А рынок потянет на миллионы экземпляров, когда они научатся двигаться.
И конечно вы правы — двуногий предназначен для среды, созданной для человека — может управлять любой техникой, которая предназначена для человека — просто сесть за штурвал самолёта или трактора или залезть в люк подлодки или ухаживать за престарелым или чего угодно.
У человеков огромная куча групп мышц, которая и позволяет нам выполнять самые разнообразные движения. Для того, чтобы то же самое смог двуногий и двурукий робот, ему нужно не меньшее количество двигателей, а Вы утверждаете, что для двуногого понадобится меньше, чем для четырехногого и он притом будет способен проходить там же, где и человек, лишь бы его запрограммировать получше.
Ну посмотрите на эти ходящие аппараты. Каких мышц по-вашему им не хватает?
Пока вы ищете объяснение почему это не будет работать, оно уже работает.
Пока вы ищете объяснение почему это не будет работать, оно уже работает.
А через заборы они лазят? И препятствие выше чем ступенька могут преодолеть? А как насчет наклонной поверхности?
Мне кажется проблема у двуногости в стабилизации тела и нагруженности конечностей, в том числе и энергии необходимой для поддержания процесса движения. И если посмотреть на животных с насекомыми, наверное тоже непросто так множество видов использует многоножие, вместо двуногости.
Чтобы попасть в это будущее, нам нужно решить множество проблем.Одну проблему/задачу — аппаратная нейросеть. И её не упомянули ни разу.
Зарегистрируйтесь на Хабре, чтобы оставить комментарий
Как создаются роботы, способные пройти там же, где и мы