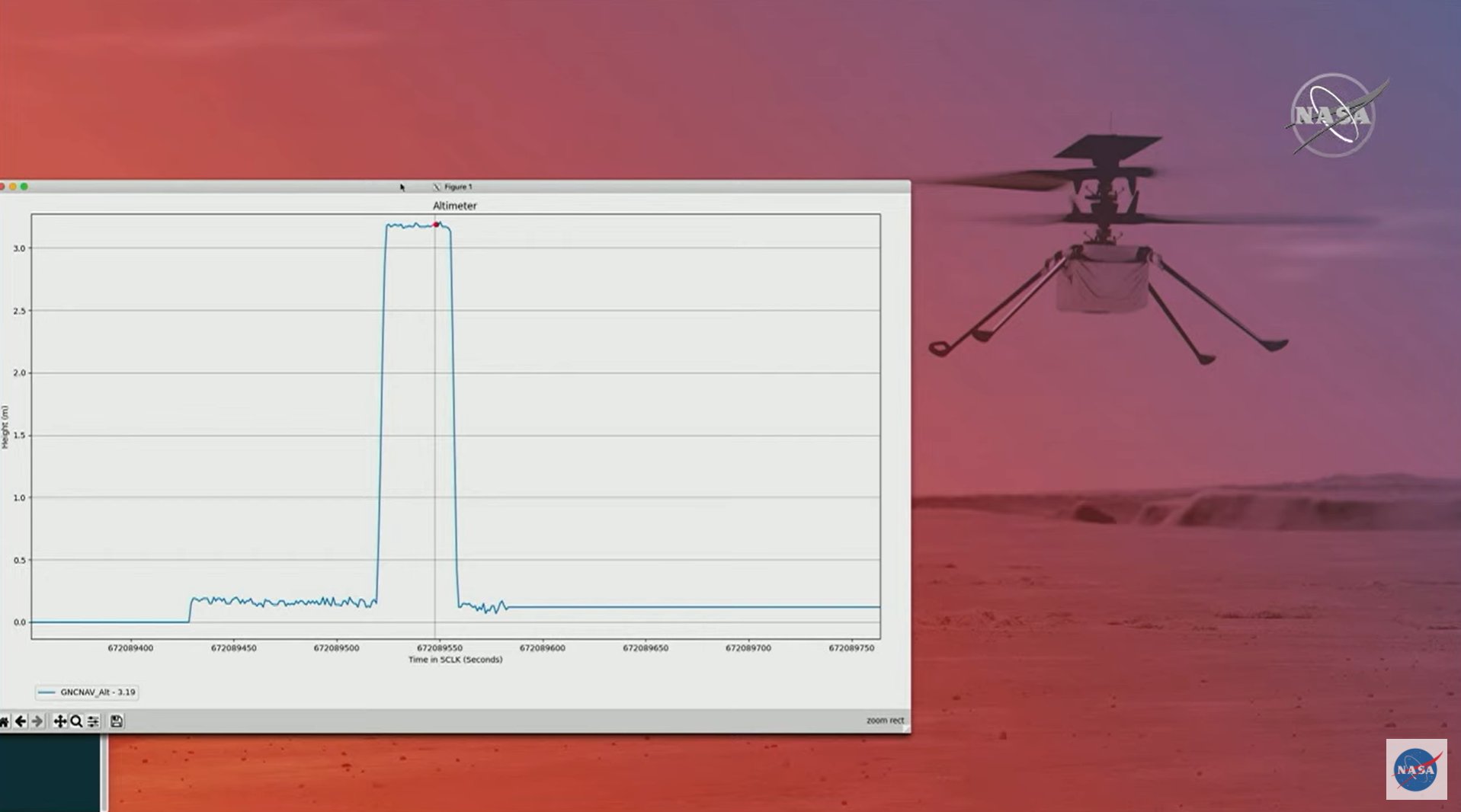
 Телеметрия первого полета вертолета «Индженьюити» на Марсе.
Телеметрия первого полета вертолета «Индженьюити» на Марсе.19 апреля 2021 года специалисты лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) сообщили, что марсианский вертолет «Индженьюити» успешно совершил свой первый тестовый полет. Аппарат поднялся на три метра, завис в атмосфере планеты, а потом мягко опустился на поверхность. Данная операция от начала раскручивания лопастей до их остановки заняла менее 1 минуты (около 40 секунд), к ней вертолет готовился 15 суток в автономном режиме после высадки с марсохода. НАСА подтвердило, что вертолет после полета находится в штатном состоянии.
 Вертолет «Индженьюити» над поверхностью Марса.
Вертолет «Индженьюити» над поверхностью Марса.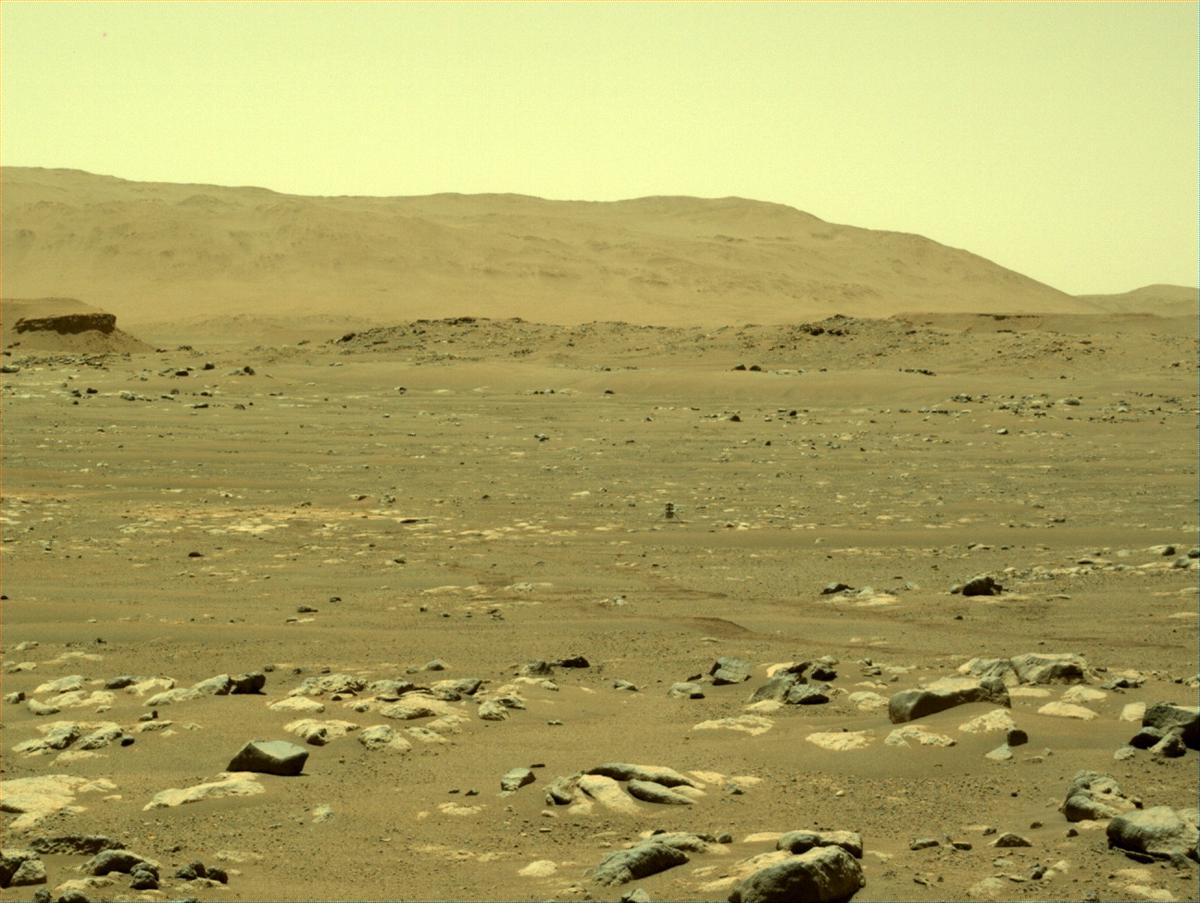 Вертолет «Индженьюити» после посадки на поверхность Марса.
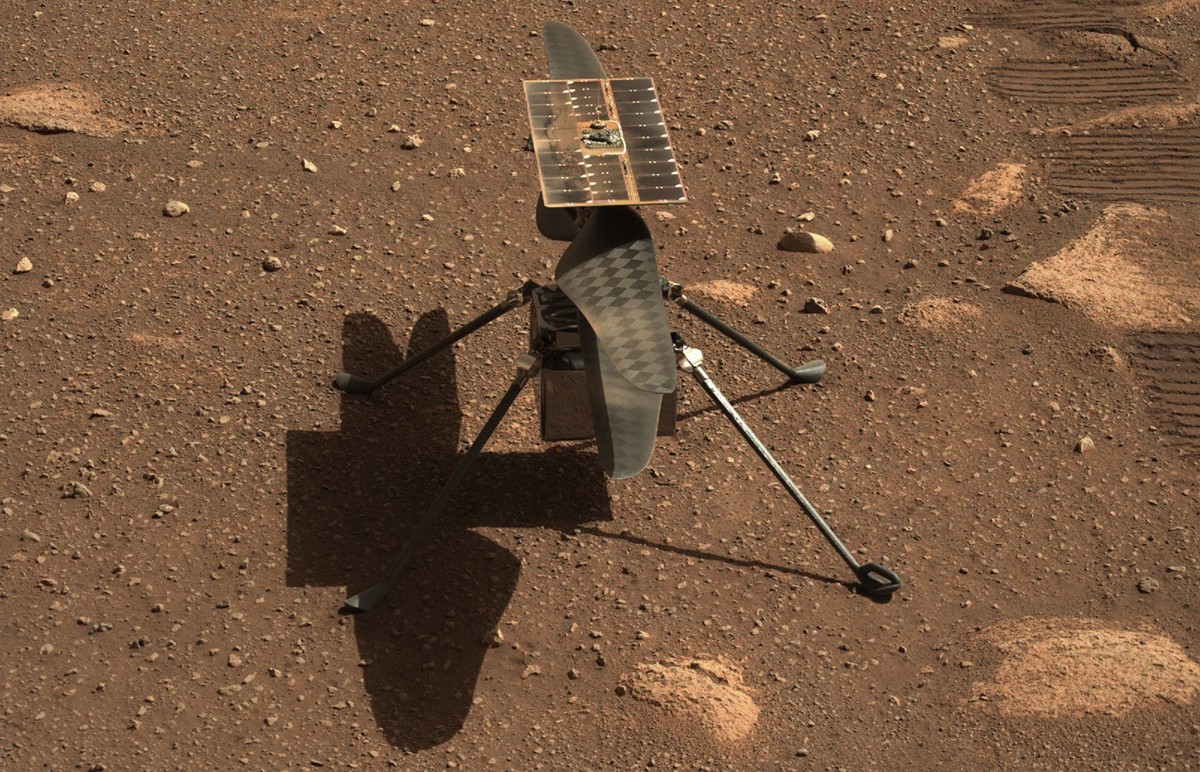
Вертолет «Индженьюити» после посадки на поверхность Марса.


Картинки с бортовой камеры вертолета во время первого полета.
Фактически «Индженьюити» сегодня реализовал такие достижения: первый самостоятельный отрыв от поверхности, первый автономный полет без управления или прерывания со стороны оператора с Земли, первую посадку БПЛА на Марсе. Стоимость этого научного проекта составила $80 млн.
НАСА разместило на вертолете кусок ткани размером с почтовую марку с первого самолета братьев Райт. Этот кусок ткани находился на крыле самолета Flyer во время его первого полета в Китти Хок, Северная Каролина, 17 декабря 1903 года.
Видео момента получения телеметрии в ЦУП JPL.
18 апреля специалисты НАСА передали команды для тестового полета на «Индженьюити». После их выполнения в ЦУП на Земле получили данные о полете только спустя три часа. Сигнал шел через марсоход и орбитальную группировку над планетой. Причем сегодня НАСА получило первые изображения полета с черно-белой навигационной камеры вертолета. Сейчас аппарат перешел в режим сна и подзаряжает свои батареи, потом он сможет передать цветные изображения со своей второй камеры.
 Вертолет «Индженьюити» готовится ко взлету на ровной площадке на поверхности Марса в 470 миллионах километрах от Земли.
Вертолет «Индженьюити» готовится ко взлету на ровной площадке на поверхности Марса в 470 миллионах километрах от Земли. Вертолет «Индженьюити» после первого полета.
Вертолет «Индженьюити» после первого полета.В текущую программу первого полета вертолета входили такие вехи: активация полетного режима (за 12 секунд скорость вращения двух лопастей достигла 2 537 оборотов в минуту), набор высоты со скоростью 1 метр в секунду до потолка в 3 метра, 30-ти секундное зависание на высоте 3 метра с небольшим вращением на месте, плавный спуск на поверхность.
Специально разработанные НАСА опоры вертолета могут скомпенсировать жесткую посадку или вертикальное падение с небольшой высоты, они гнутся и не дают вертолету разбить свои бортовые элементы. Лопасти вертолета могут серьезно пострадать при грубом аварийном приземлении на неровную поверхность.
Вертолет «Индженьюити» на поверхности Марса. Источник фото: бортовая камера на марсоходе «Персеверанс».
 Защитный кожух от вертолета «Индженьюити» на поверхности Марса. Он был сброшен с марсохода перед отделением вертолета с его борта. Теперь это технический мусор на планете.
Защитный кожух от вертолета «Индженьюити» на поверхности Марса. Он был сброшен с марсохода перед отделением вертолета с его борта. Теперь это технический мусор на планете.За день до старта НАСА оценило шанс успешного взлета в 85 %. Специалисты JPL тогда пояснили, что готовы пойти на такой риск и почти уверены, что аппарат перейдет в режим полета и начнет выполнять все нужные команды для взлета и посадки.
Марсоход «Персеверанс» наблюдал за первым полетом вертолета на удалении 65 метров от места его взлета. Он был установлен специалистами НАСА на ранее выбранную смотровую площадку, а его бортовые камеры были направлены на место размещение вертолета «Индженьюити» и проводили съемку процесса полета.

Марсоход «Персеверанс» следит за вертолетом «Индженьюити».
Технические характеристики марсианского БПЛА.
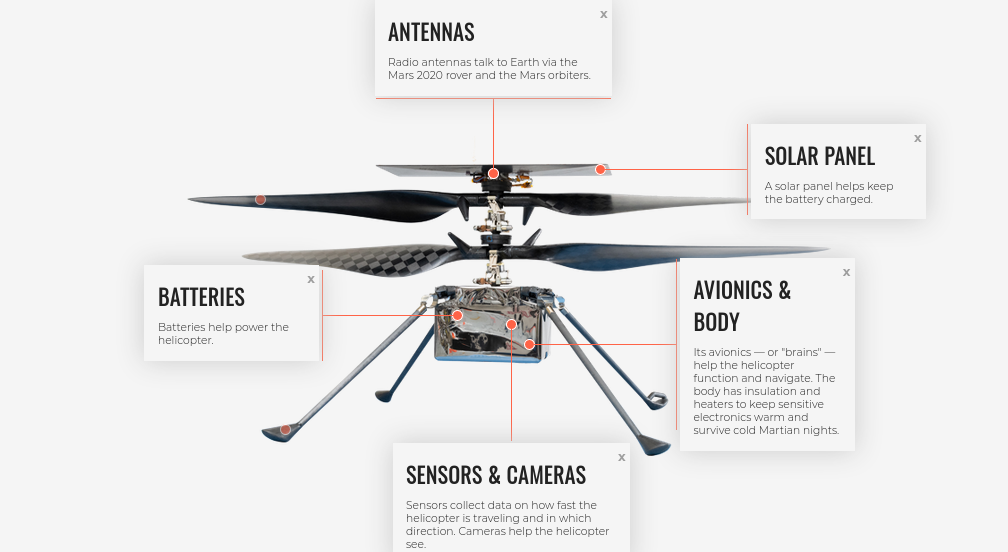
Вертолет «Индженьюити» имеет массу 1,8 кг (0,68 кг в марсианской гравитации), четыре опоры с посадочными чашками, на его борту установлены две цветные камеры (0,5 МП для ориентации и 13 МП для аэрофотосъемки в 4K), система навигации, включая лазерный высотомер от SparkFun Electronics и гиростабилизатор (IMU), система передачи данных (канал связи до 250 Кбит/с на расстоянии до 800 метров от марсохода), а также аккумуляторные батареи и солнечная панель. На дроне установлены два соосных несущих контрвращающихся карбоновых винта диаметром 1,2 метра каждый, их обороты будут достигать 2 537 в минуту. Заряда батарей должно хватать на один полутораминутный полет, потом аппарату нужна посадка, подзарядка батарей, тестирование внутренних систем и заливка нового ПО для полета.
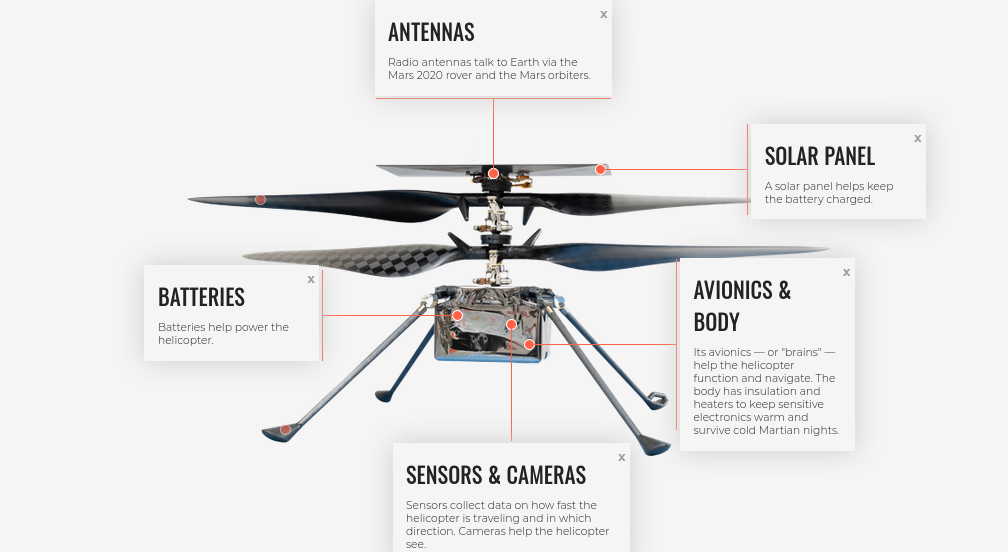
Элементы марсианского вертолета.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, делать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Заявленное НАСА время автономной работы дрона на поверхности Марса — 30 солов (31 земные сутки). За это время он должен был подготовить свои бортовые системы, совершить первый тестовый полет, состоящий из тридцатисекундного подъема на три метра, а также четыре-пять запланированных полетов на дальние расстояния, в которых он будет подниматься на высоту до 5 метров и отлетать от марсохода на расстояние до 100 метров. Фактически пятая часть этого времени уже прошла, а вертолет еще не взлетел даже один раз. Вероятно, что количество его полетов НАСА сократит из-за деградации батарей и проблем с незащищенной аппаратной частью, которая не сможет работать дольше расчетного срока.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
«Марс труден не только тогда, когда вы приземляетесь, но и когда вы пытаетесь оторваться от него и летать вокруг над планетой», — пояснила вчера руководитель проекта «Индженьюити» МиМи Аунг (MiMi Aung). О том, какие трудности возникли при реализации этого проекта, можно почитать в этой публикации на Хабре.
Элементы марсианского вертолета.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, делать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Заявленное НАСА время автономной работы дрона на поверхности Марса — 30 солов (31 земные сутки). За это время он должен был подготовить свои бортовые системы, совершить первый тестовый полет, состоящий из тридцатисекундного подъема на три метра, а также четыре-пять запланированных полетов на дальние расстояния, в которых он будет подниматься на высоту до 5 метров и отлетать от марсохода на расстояние до 100 метров. Фактически пятая часть этого времени уже прошла, а вертолет еще не взлетел даже один раз. Вероятно, что количество его полетов НАСА сократит из-за деградации батарей и проблем с незащищенной аппаратной частью, которая не сможет работать дольше расчетного срока.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
«Марс труден не только тогда, когда вы приземляетесь, но и когда вы пытаетесь оторваться от него и летать вокруг над планетой», — пояснила вчера руководитель проекта «Индженьюити» МиМи Аунг (MiMi Aung). О том, какие трудности возникли при реализации этого проекта, можно почитать в этой публикации на Хабре.
Следующая миссия вертолета — управляемый полет на высоте около 5 метров с удалением от места взлета на 50-100 метров и возвращение обратно.
4 апреля вертолет «Индженьюити» отделился от марсохода и десантировался с высоты 10 см от его брюха на поверхность планеты.
5 апреля НАСА вертолет успешно пережил первую марсианскую ночь в автономном режиме.
7 апреля появилось селфи марсохода «Персеверанс» с вертолетом «Индженьюити».
9 апреля «Индженьюити» успешно разблокировал роторы двигателей и протестировал запуск лопастей на низких оборотах.
10 апреля во время теста лопастей марсианского вертолета на высоких оборотах произошла нештатная ситуация. Аппарат не пострадал, возникли неполадки в программном обеспечении.
12 апреля специалисты JPL нашли проблему в софте марсианского вертолета и начали ее устранять.
16 апреля вертолет успешно протестировал запуск лопастей на высоких оборотах со второй попытки.

Google добавила в поисковую выдачу полет вертолета «Индженьюити». Нужно нажать справа на вертолетик.















{kind=link}