В одном из предыдущих постов я рассказывал о проектах созданных пользователями программы FLProg. А сегодня я хочу рассказать о системе созданной мною самим.
В одном из предыдущих постов я рассказывал о проектах созданных пользователями программы FLProg. А сегодня я хочу рассказать о системе созданной мною самим.Серверная на станции где я работаю, как и положено находится в отдельном помещении. Для охлаждения серверов там установлено два кондиционера. К сожалению это обычные бытовые модели, так что регулярно то один, то другой находятся в ремонте. Руководство отдела, зная о моей работе над проектом FLProg, предложило создать систему мониторинга температуры в серверных шкафах, и управления работой их вентиляторов. Информация о текущей температуре должна отображаться на табло в помещении дежурных инженеров, и в случае повышения температуры свыше определенного порога выдавать звуковую сигнализацию. Я взялся за эту работу, и вот что получилось…
Ситуация осложнялась тем что мы находимся где то в 200 километров от ближайшей цивилизации, и собирать систему пришлось из тех запасов что у меня были с собой, плюс что то из старого хлама из кладовок. В наличии у меня были:
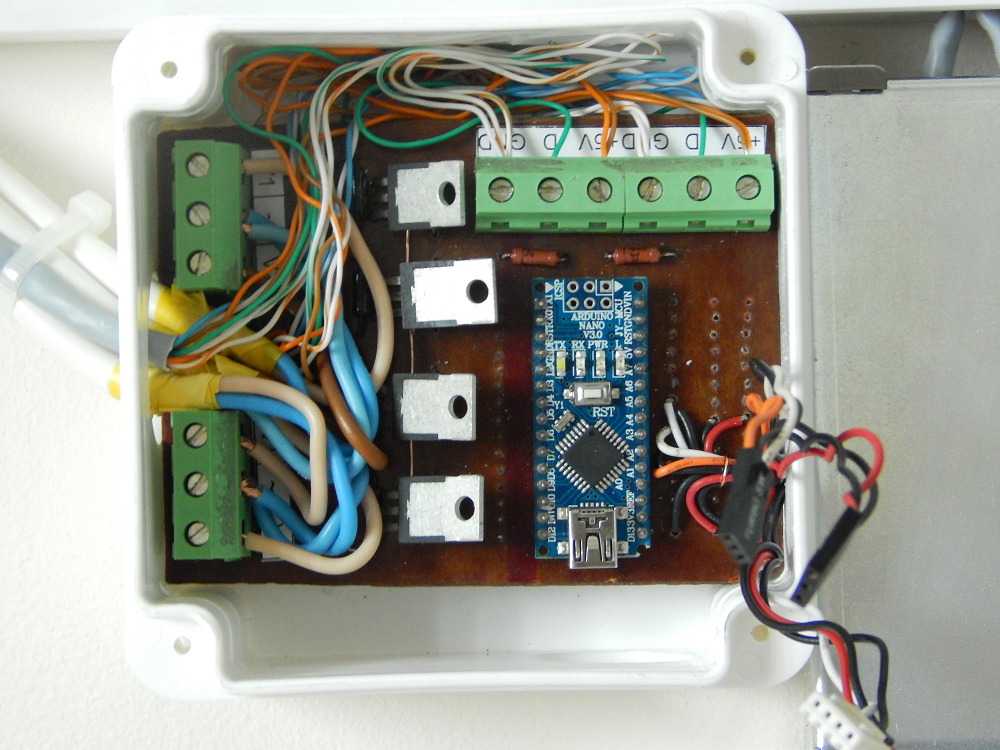
1. Arduino Nano
2. Датчик температуры DS18B20
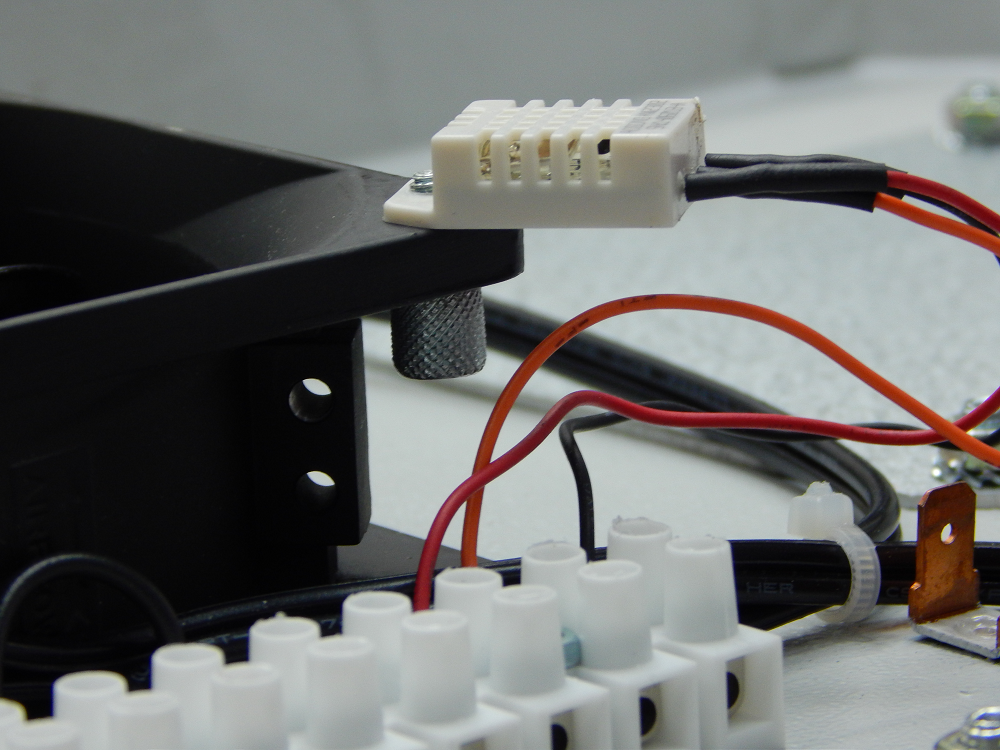
3. Два датчика температуры и влажности DHT-22
4. Четырехстрочный дисплей на 20 символов в строке с платой I2C
Была разработана схема устройства: Принципиальная схема
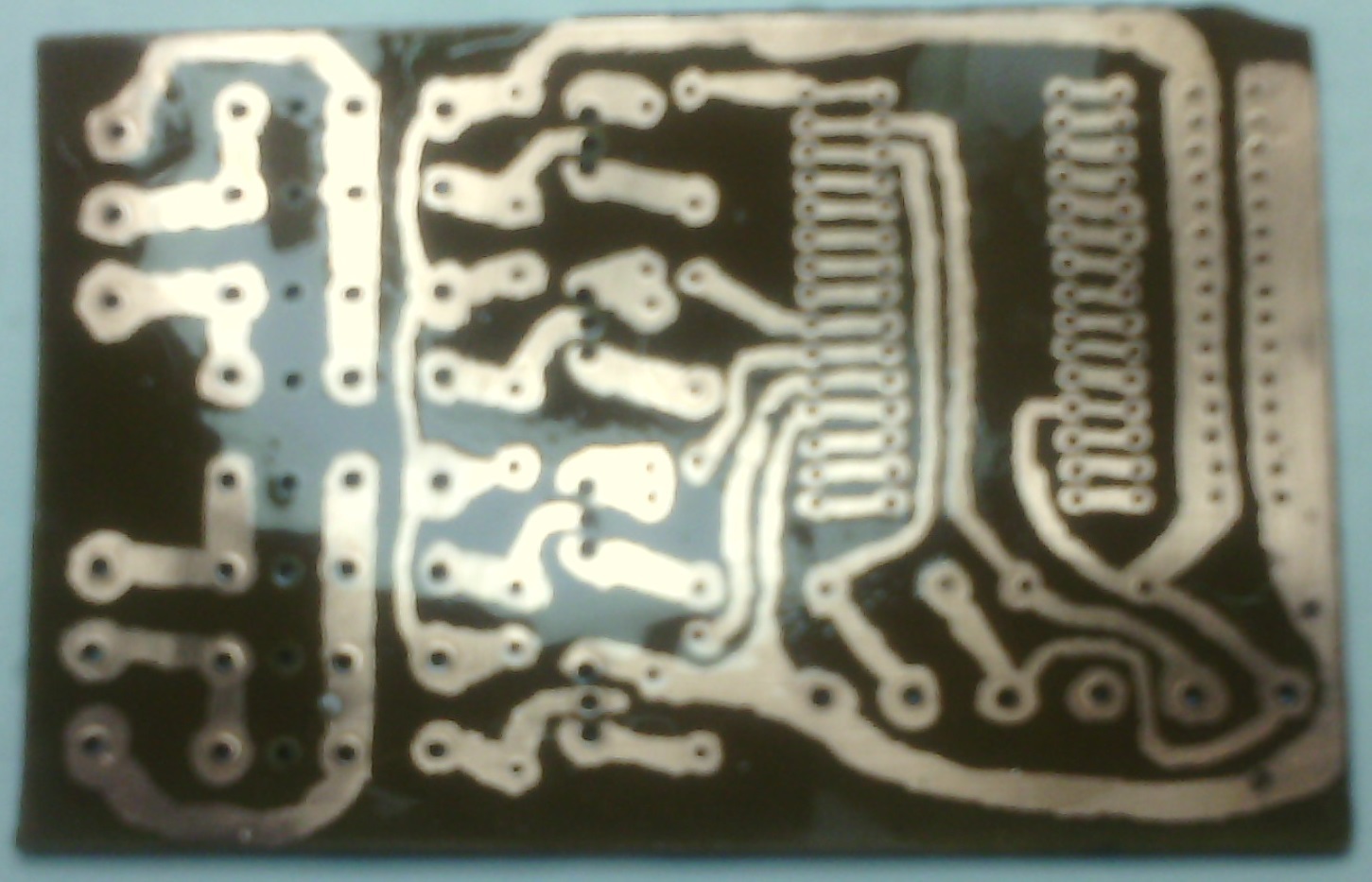
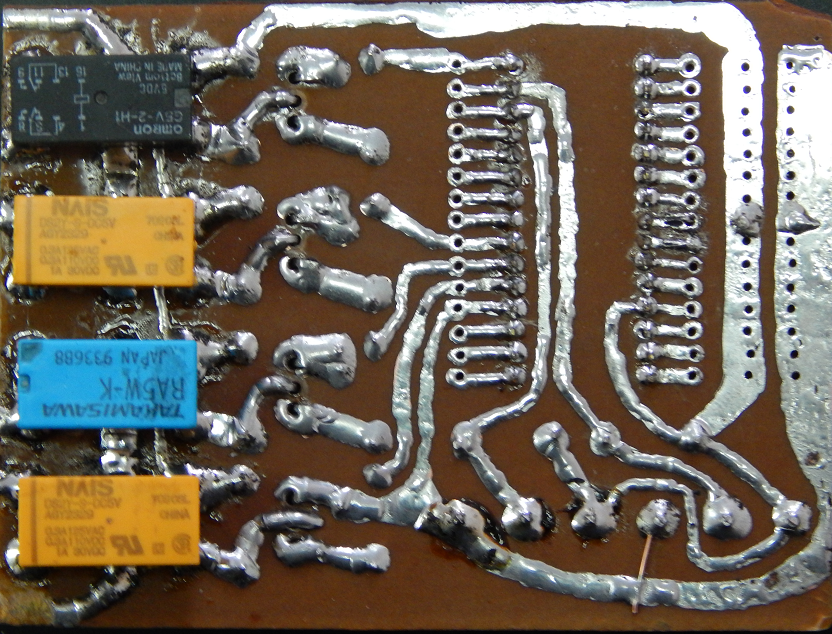
Потом разработаны печатные платы:
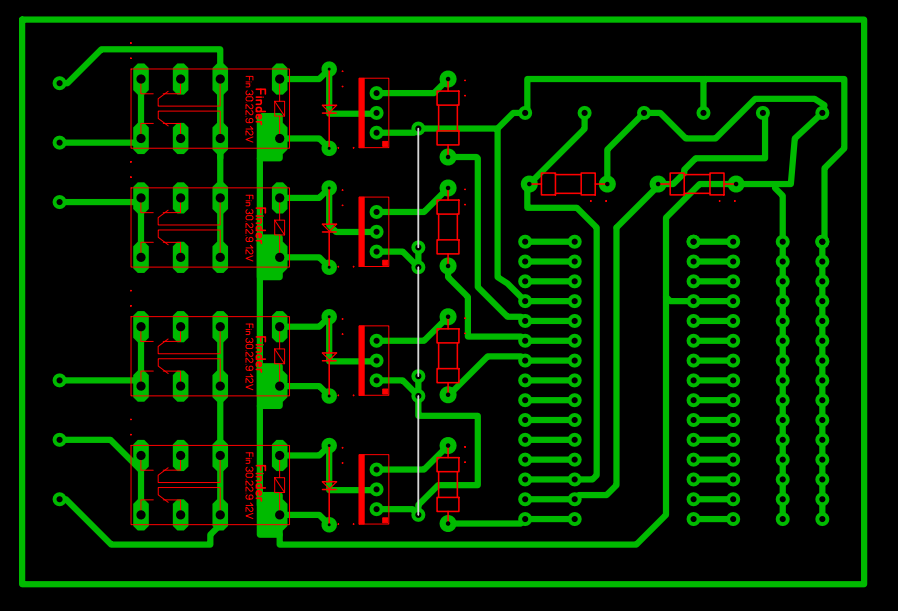
Основная плата в программе Sprint-Layout_6
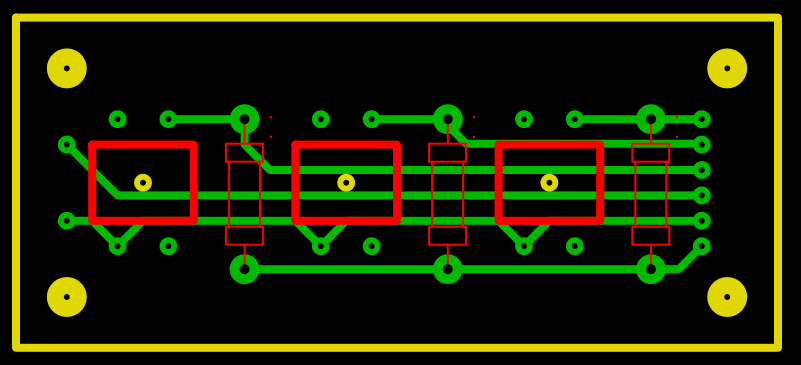
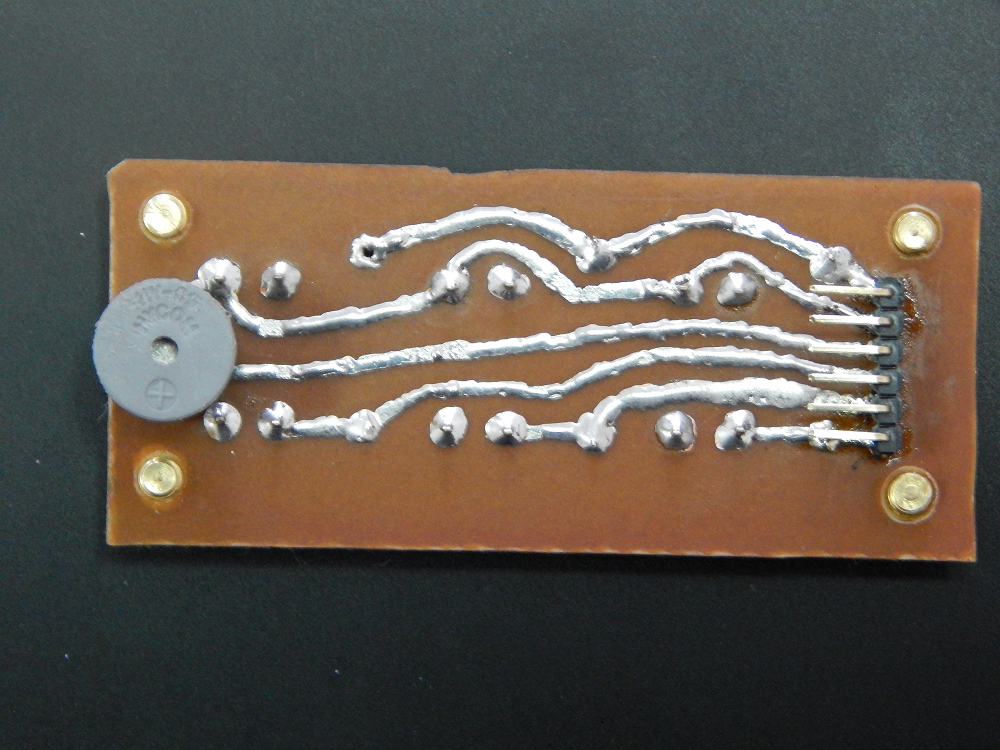
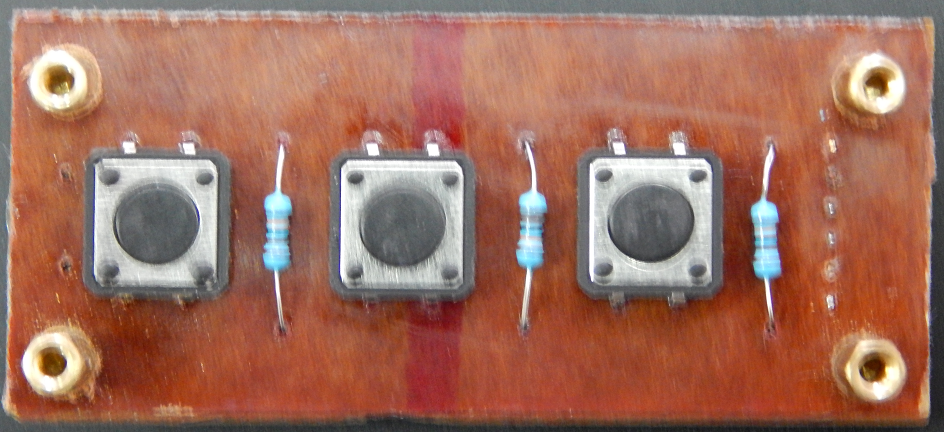
Кнопочная плата в программе Sprint-Layout_6
Утюга и специальной бумаги для технологии ЛУТ не нашлось так что пришлось вспоминать детство и рисовать платы ручками лаком, выпрошенным у уборщицы.
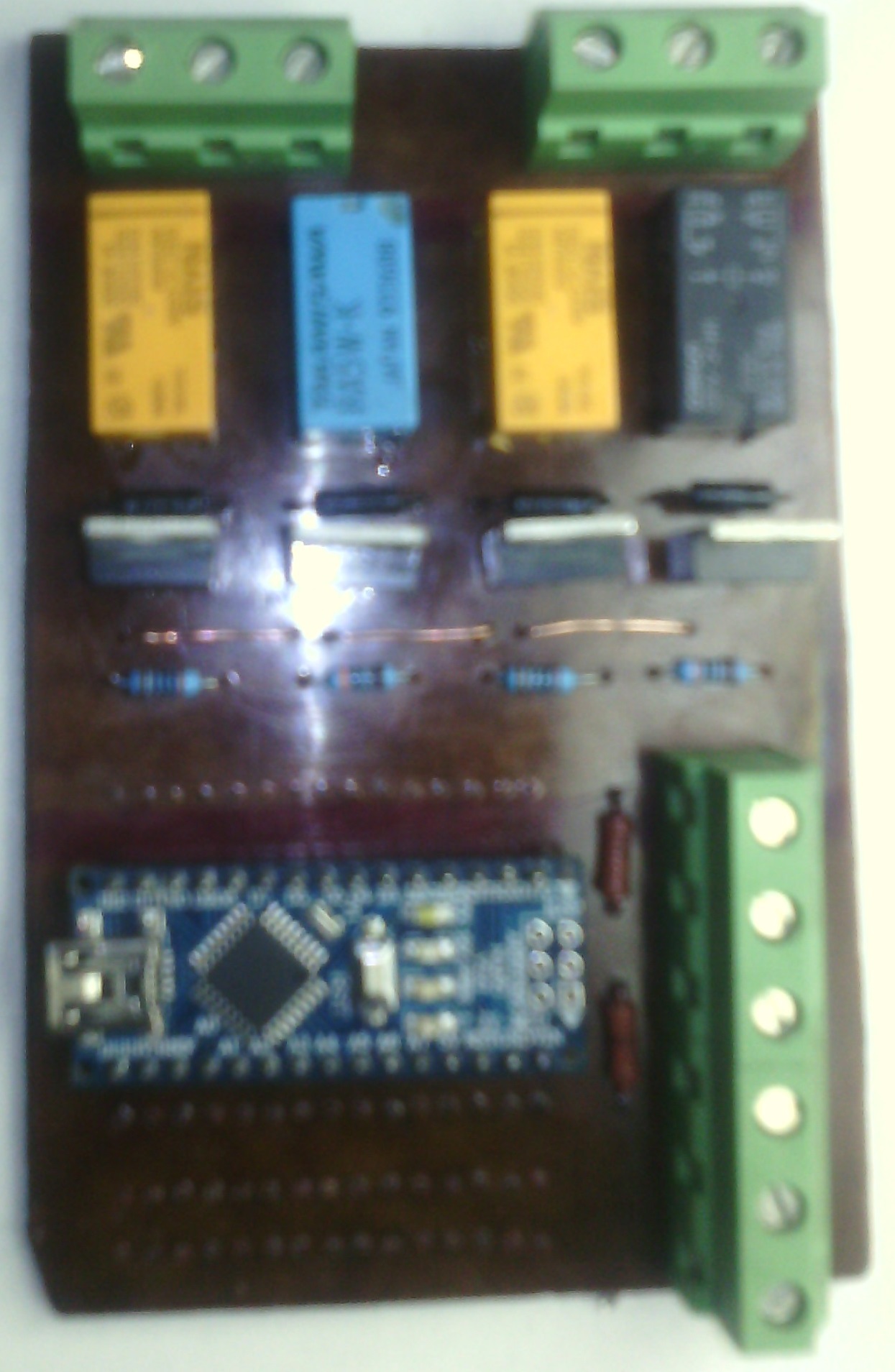
После первоначальной сборки и заливки пробного скетча возникли первые проблемы. Во первых, реле отказались срабатывать, хотя на катушки приходило 5 вольт. Перед установкой на плату я естественно проверял сопротивление катушек и подавал на них питание с проверкой сработки. Оказалось что реле очень хитрое. Хотя внутри и нет диодов (в обе стороны катушки прозваниваются одинаково), для них играет роль полярность питания на катушках. Скорее всего, у них подмагниченный якорь для снижения тока срабатывания. Из-за этого, релюшки переехали на другую сторону платы. После переезда релюшек все нормально заработало.

Затем была разработана окончательная прошивка для платы.
Проект в программе FLProg.
Скетчь
#include <Wire.h>
#include <OneWire.h>
#include <LiquidCrystal_I2C.h>
#include <EEPROM.h>
#include "DHT.h"
LiquidCrystal_I2C _lcd1(0x3F, 20, 4);
int _dispTempLength1=0;
boolean _isNeedClearDisp1;
byte _d18x2x1Addr[8]={0x28, 0xFF, 0x11, 0x94, 0x3C, 0x4, 0x0, 0x48};
DHT _dht1(11, DHT22);
OneWire _ow10(10);
bool _gtv1 = 0;
bool _gtv3 = 0;
bool _gtv4 = 0;
bool _gtv5 = 0;
int _gtv2 = 23;
int _gtv6 = 27;
int _gtv7 = 30;
int _gtv8 = 35;
int _gtv9 = 0;
bool _gtv10 = 0;
String _gtv11 = "_C";
bool _gtv12 = 0;
bool _gtv13 = 0;
float _gtv14 = 0;
float _gtv15 = 0;
bool _gtv16 = 0;
int _gtv17 = 10;
bool _gtv18 = 0;
bool _gtv19 = 0;
bool _gtv20 = 0;
bool _gtv21 = 0;
bool _gtv22 = 0;
bool _gtv23 = 0;
bool _gtv24 = 0;
bool _gtv25 = 0;
bool _gtv26 = 0;
bool _gtv27 = 0;
bool _gtv28 = 0;
bool _trgrt9 = 0;
bool _trgrt9I = 0;
bool _bounse1S = 0;
bool _bounse1O = 0;
unsigned long _bounse1P = 0UL;
bool _trgrt4 = 0;
bool _trgrt4I = 0;
bool _bounse2S = 0;
bool _bounse2O = 0;
unsigned long _bounse2P = 0UL;
bool _trgrt5 = 0;
bool _trgrt5I = 0;
bool _bounse3S = 0;
bool _bounse3O = 0;
unsigned long _bounse3P = 0UL;
bool _trgrt8 = 0;
bool _trgrt8I = 0;
bool _count1I = 0;
int _count1P = 0;
bool _tim1I = 0;
bool _tim1O = 0;
unsigned long _tim1P = 0UL;
bool _trgrt1 = 0;
bool _trgrt1I = 0;
bool _trgrt2 = 0;
bool _trgrt2I = 0;
bool _trgrt3 = 0;
bool _trgrt3I = 0;
int _disp1oldLength = 0;
String _mux1;
int _disp3oldLength = 0;
int _disp4oldLength = 0;
int _disp5oldLength = 0;
int _disp6oldLength = 0;
int _disp7oldLength = 0;
String _swi2;
String _swi3;
int _disp2oldLength = 0;
String _mux2;
int _disp8oldLength = 0;
int _disp9oldLength = 0;
int _disp10oldLength = 0;
int _disp11oldLength = 0;
int _disp12oldLength = 0;
String _swi4;
String _swi5;
bool _trgrt10 = 0;
bool _trgrt10I = 0;
bool _trgrt11 = 0;
bool _trgrt11I = 0;
bool _trgrt12 = 0;
bool _trgrt12I = 0;
bool _trgrt13 = 0;
bool _trgrt13I = 0;
unsigned long _d18x2x1Tti = 0UL;
float _d18x2x1O = 0.00;
unsigned long _dht1Tti = 0UL;
float _dht1t = 0.00;
float _dht1h = 0.00;
bool _trgr1 = 0;
bool _trgr2 = 0;
bool _trgrt6 = 0;
bool _trgrt6I = 0;
bool _trgr3 = 0;
bool _trgr4 = 0;
bool _trgrt7 = 0;
bool _trgrt7I = 0;
bool _trgr5 = 0;
bool _pzs1OES = 0;
int _pzs1OFS = 0;
bool _gen1I = 0;
bool _gen1O = 0;
unsigned long _gen1P = 0UL;
int _swi1;
bool _D1B1 = 0;
bool _gen2I = 0;
bool _gen2O = 0;
unsigned long _gen2P = 0UL;
String _swi6;
int _disp13oldLength = 0;
bool _SEEPR1OSN = 0;
bool _SEEPR2OSN = 0;
bool _SEEPR3OSN = 0;
bool _SEEPR4OSN = 0;
void setup()
{
Wire.begin();
pinMode(12, OUTPUT);
pinMode(4, OUTPUT);
pinMode(3, OUTPUT);
pinMode(2, OUTPUT);
_lcd1.init();
_lcd1.noBacklight();
_dht1.begin();
}
void loop()
{if(_isTimer(_dht1Tti, 6000)) {
_dht1Tti = millis();
float tempDht11;
tempDht11 = _dht1.readTemperature();
if (!(isnan(tempDht11))){_dht1t=tempDht11; }
}if (_isNeedClearDisp1) {_lcd1.clear(); _isNeedClearDisp1= 0;}
if (1) { if (_trgrt9I) { _trgrt9 = 0;} else {_trgrt9 = 1; _trgrt9I = 1;} } else {_trgrt9 = 0; _trgrt9I = 0;};
if (_trgrt9) {
_gtv6 = (EEPROMReadInt(0));
}
if (_trgrt9) {
_gtv7 = (EEPROMReadInt(2));
}
if (_trgrt9) {
_gtv2 = (EEPROMReadInt(4));
}
if (_trgrt9) {
_gtv8 = (EEPROMReadInt(6));
}
bool _bounceTmp1 = ! (( (analogRead (3))) > (500));
if (_bounse1S)
{
if (millis() >= (_bounse1P + 40))
{_bounse1O= _bounceTmp1; _bounse1S=0;}
}
else
{
if (_bounceTmp1 != _bounse1O )
{_bounse1S=1; _bounse1P = millis();}
}
if (_bounse1O) { if (_trgrt4I) { _trgrt4 = 0;} else {_trgrt4 = 1; _trgrt4I = 1;} } else {_trgrt4 = 0; _trgrt4I = 0;};
_gtv3 = _bounse1O;
_gtv12 = (_trgrt4) && (!(_gtv20)) ;
bool _bounceTmp2 = ! (( (analogRead (2))) > (500));
if (_bounse2S)
{
if (millis() >= (_bounse2P + 40))
{_bounse2O= _bounceTmp2; _bounse2S=0;}
}
else
{
if (_bounceTmp2 != _bounse2O )
{_bounse2S=1; _bounse2P = millis();}
}
if (_bounse2O) { if (_trgrt5I) { _trgrt5 = 0;} else {_trgrt5 = 1; _trgrt5I = 1;} } else {_trgrt5 = 0; _trgrt5I = 0;};
_gtv4 = _bounse2O;
_gtv13 = (_trgrt5) && (!(_gtv20)) ;
bool _bounceTmp3 = ! (( (analogRead (1))) > (500));
if (_bounse3S)
{
if (millis() >= (_bounse3P + 40))
{_bounse3O= _bounceTmp3; _bounse3S=0;}
}
else
{
if (_bounceTmp3 != _bounse3O )
{_bounse3S=1; _bounse3P = millis();}
}
if (_bounse3O) { if (_trgrt8I) { _trgrt8 = 0;} else {_trgrt8 = 1; _trgrt8I = 1;} } else {_trgrt8 = 0; _trgrt8I = 0;};
_gtv5 = _bounse3O;
_gtv19 = (_trgrt8) && (!(_gtv20)) ;
if (_gtv19)
{
if (! _count1I)
{
_count1P = _count1P+1;
_count1I = 1;
}
}
else
{
_count1I=0;
}
if (_count1P < 0 ) _count1P = 0;
if ( (_gtv1) || (_gtv10) ) _count1P = 0;
if (_gtv5) { if (_trgrt1I) { _trgrt1 = 0;} else {_trgrt1 = 1; _trgrt1I = 1;} } else {_trgrt1 = 0; _trgrt1I = 0;};
if (_gtv3) { if (_trgrt2I) { _trgrt2 = 0;} else {_trgrt2 = 1; _trgrt2I = 1;} } else {_trgrt2 = 0; _trgrt2I = 0;};
if (_gtv4) { if (_trgrt3I) { _trgrt3 = 0;} else {_trgrt3 = 1; _trgrt3I = 1;} } else {_trgrt3 = 0; _trgrt3I = 0;};
if ( ((_count1P) > (0)) && ((! (_trgrt1) || (_trgrt2) || (_trgrt3) )) )
{
if (_tim1I)
{
if ( _isTimer(_tim1P, 60000)) _tim1O = 1;
}
else
{
_tim1I = 1;
_tim1P = millis();
}
}
else
{
_tim1O = 0;
_tim1I = 0;
}
_gtv9 = _count1P;
_gtv1 = _count1P >= 5;
_gtv10 = _tim1O;
if((_gtv9) == 0) {_mux1 = String("Terst");}
if((_gtv9) == 1) {_mux1 = String("Value Off");}
if((_gtv9) == 2) {_mux1 = String("Value 1 On");}
if((_gtv9) == 3) {_mux1 = String("Value 2 On");}
if((_gtv9) == 4) {_mux1 = String("Value Alarm");}
if ((_gtv9) > (0)) {
_dispTempLength1 = ((_mux1)).length();
if (_disp1oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp1oldLength = _dispTempLength1;
_lcd1.setCursor(int((20 - _dispTempLength1)/2), 0);
_lcd1.print((_mux1));
} else {
if (_disp1oldLength > 0) {_isNeedClearDisp1 = 1; _disp1oldLength = 0;}
}
if ((0) == (_gtv9)) {
_dispTempLength1 = (String("SU T:")).length();
if (_disp3oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp3oldLength = _dispTempLength1;
_lcd1.setCursor(0, 0);
_lcd1.print(String("SU T:"));
} else {
if (_disp3oldLength > 0) {_isNeedClearDisp1 = 1; _disp3oldLength = 0;}
}
if ((0) == (_gtv9)) {
_dispTempLength1 = ((( _floatToStringWitRaz(_gtv14,1)))).length();
if (_disp4oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp4oldLength = _dispTempLength1;
_lcd1.setCursor(5, 0);
_lcd1.print((( _floatToStringWitRaz(_gtv14,1))));
} else {
if (_disp4oldLength > 0) {_isNeedClearDisp1 = 1; _disp4oldLength = 0;}
}
if ((0) == (_gtv9)) {
_dispTempLength1 = (String("C")).length();
if (_disp5oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp5oldLength = _dispTempLength1;
_lcd1.setCursor(9, 0);
_lcd1.print(String("C"));
} else {
if (_disp5oldLength > 0) {_isNeedClearDisp1 = 1; _disp5oldLength = 0;}
}
if(_gtv21)
{_swi2=String("*");}
else
{_swi2=String("-");}
if ((0) == (_gtv9)) {
_dispTempLength1 = ((_swi2)).length();
if (_disp6oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp6oldLength = _dispTempLength1;
_lcd1.setCursor(11, 0);
_lcd1.print((_swi2));
} else {
if (_disp6oldLength > 0) {_isNeedClearDisp1 = 1; _disp6oldLength = 0;}
}
if(_gtv22)
{_swi3=String("*");}
else
{_swi3=String("-");}
if ((0) == (_gtv9)) {
_dispTempLength1 = ((_swi3)).length();
if (_disp7oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp7oldLength = _dispTempLength1;
_lcd1.setCursor(13, 0);
_lcd1.print((_swi3));
} else {
if (_disp7oldLength > 0) {_isNeedClearDisp1 = 1; _disp7oldLength = 0;}
}
if((_gtv9) == 0) {_mux2 = String("test");}
if((_gtv9) == 1) {_mux2 = (((String(_gtv2))) + (_gtv11));}
if((_gtv9) == 2) {_mux2 = (((String(_gtv6))) + (_gtv11));}
if((_gtv9) == 3) {_mux2 = (((String(_gtv7))) + (_gtv11));}
if((_gtv9) == 4) {_mux2 = (((String(_gtv8))) + (_gtv11));}
if ((_gtv9) > (0)) {
_dispTempLength1 = ((_mux2)).length();
if (_disp2oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp2oldLength = _dispTempLength1;
_lcd1.setCursor(int((20 - _dispTempLength1)/2), 1);
_lcd1.print((_mux2));
} else {
if (_disp2oldLength > 0) {_isNeedClearDisp1 = 1; _disp2oldLength = 0;}
}
if ((0) == (_gtv9)) {
_dispTempLength1 = (String("CU T:")).length();
if (_disp8oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp8oldLength = _dispTempLength1;
_lcd1.setCursor(0, 1);
_lcd1.print(String("CU T:"));
} else {
if (_disp8oldLength > 0) {_isNeedClearDisp1 = 1; _disp8oldLength = 0;}
}
if ((0) == (_gtv9)) {
_dispTempLength1 = ((( _floatToStringWitRaz(_gtv15,1)))).length();
if (_disp9oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp9oldLength = _dispTempLength1;
_lcd1.setCursor(5, 1);
_lcd1.print((( _floatToStringWitRaz(_gtv15,1))));
} else {
if (_disp9oldLength > 0) {_isNeedClearDisp1 = 1; _disp9oldLength = 0;}
}
if ((0) == (_gtv9)) {
_dispTempLength1 = (String("C")).length();
if (_disp10oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp10oldLength = _dispTempLength1;
_lcd1.setCursor(9, 1);
_lcd1.print(String("C"));
} else {
if (_disp10oldLength > 0) {_isNeedClearDisp1 = 1; _disp10oldLength = 0;}
}
if(_gtv23)
{_swi4=String("*");}
else
{_swi4=String("-");}
if ((0) == (_gtv9)) {
_dispTempLength1 = ((_swi4)).length();
if (_disp11oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp11oldLength = _dispTempLength1;
_lcd1.setCursor(11, 1);
_lcd1.print((_swi4));
} else {
if (_disp11oldLength > 0) {_isNeedClearDisp1 = 1; _disp11oldLength = 0;}
}
if(_gtv24)
{_swi5=String("*");}
else
{_swi5=String("-");}
if ((0) == (_gtv9)) {
_dispTempLength1 = ((_swi5)).length();
if (_disp12oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp12oldLength = _dispTempLength1;
_lcd1.setCursor(13, 1);
_lcd1.print((_swi5));
} else {
if (_disp12oldLength > 0) {_isNeedClearDisp1 = 1; _disp12oldLength = 0;}
}
if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt10I) { _trgrt10 = 0;} else {_trgrt10 = 1; _trgrt10I = 1;} } else {_trgrt10 = 0; _trgrt10I = 0;};
if ( (_gtv12) && ((_gtv9) == (1)) ) {
_gtv2 = (_gtv2)+(1);
}
if ( ((_gtv9) == (1)) && (_gtv13) ) {
_gtv2 = (_gtv2)-(1);
}
if (_trgrt10) {
_gtv2 = 25;
}
_gtv25 = ( (_gtv12) && ((_gtv9) == (1)) ) || ( ((_gtv9) == (1)) && (_gtv13) ) || (_trgrt10) ;
if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt11I) { _trgrt11 = 0;} else {_trgrt11 = 1; _trgrt11I = 1;} } else {_trgrt11 = 0; _trgrt11I = 0;};
if ( (_gtv12) && ((_gtv9) == (2)) ) {
_gtv6 = (_gtv6)+(1);
}
if ( ((_gtv9) == (2)) && (_gtv13) ) {
_gtv6 = (_gtv6)-(1);
}
if (_trgrt11) {
_gtv6 = 27;
}
_gtv26 = ( (_gtv12) && ((_gtv9) == (2)) ) || ( ((_gtv9) == (2)) && (_gtv13) ) || (_trgrt11) ;
if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt12I) { _trgrt12 = 0;} else {_trgrt12 = 1; _trgrt12I = 1;} } else {_trgrt12 = 0; _trgrt12I = 0;};
if ( (_gtv12) && ((_gtv9) == (3)) ) {
_gtv7 = (_gtv7)+(1);
}
if ( ((_gtv9) == (3)) && (_gtv13) ) {
_gtv7 = (_gtv7)-(1);
}
if (_trgrt12) {
_gtv7 = 30;
}
_gtv27 = ( (_gtv12) && ((_gtv9) == (3)) ) || ( ((_gtv9) == (3)) && (_gtv13) ) || (_trgrt12) ;
if ( (_gtv5) && (_gtv3) && (_gtv4) ) { if (_trgrt13I) { _trgrt13 = 0;} else {_trgrt13 = 1; _trgrt13I = 1;} } else {_trgrt13 = 0; _trgrt13I = 0;};
if ( (_gtv12) && ((_gtv9) == (4)) ) {
_gtv8 = (_gtv8)+(1);
}
if ( ((_gtv9) == (4)) && (_gtv13) ) {
_gtv8 = (_gtv8)-(1);
}
if (_trgrt13) {
_gtv8 = 35;
}
_gtv28 = ( (_gtv12) && ((_gtv9) == (4)) ) || ( ((_gtv9) == (4)) && (_gtv13) ) || (_trgrt13) ;
if(_isTimer(_d18x2x1Tti, 5000)) {
_d18x2x1Tti = millis();
_d18x2x1O= _readDS18_ow10(_d18x2x1Addr, 0);}
_gtv14 = (_d18x2x1O);
_gtv15 = _dht1t;
if(((int((_gtv14)*(_gtv17)))) < ((_gtv2)*(_gtv17))) _trgr1 = 0;
if(((int((_gtv14)*(_gtv17)))) > ((_gtv6)*(_gtv17))) _trgr1 = 1;
if(((int((_gtv14)*(_gtv17)))) < ((_gtv2)*(_gtv17))) _trgr2 = 0;
if(((int((_gtv14)*(_gtv17)))) > ((_gtv7)*(_gtv17))) _trgr2 = 1;
if (((int((_gtv14)*(_gtv17)))) > ((_gtv17)*(_gtv8))) { if (_trgrt6I) { _trgrt6 = 0;} else {_trgrt6 = 1; _trgrt6I = 1;} } else {_trgrt6 = 0; _trgrt6I = 0;};
if(((int((_gtv17)*(_gtv15)))) < ((_gtv2)*(_gtv17))) _trgr3 = 0;
if(((int((_gtv17)*(_gtv15)))) > ((_gtv6)*(_gtv17))) _trgr3 = 1;
if(((int((_gtv17)*(_gtv15)))) < ((_gtv2)*(_gtv17))) _trgr4 = 0;
if(((int((_gtv17)*(_gtv15)))) > ((_gtv7)*(_gtv17))) _trgr4 = 1;
if (((int((_gtv17)*(_gtv15)))) > ((_gtv17)*(_gtv8))) { if (_trgrt7I) { _trgrt7 = 0;} else {_trgrt7 = 1; _trgrt7I = 1;} } else {_trgrt7 = 0; _trgrt7I = 0;};
_gtv16 = _trgrt6;
_gtv21 = _trgr1;
digitalWrite(12, _trgr1);
digitalWrite(3, _trgr3);
_gtv18 = _trgrt7;
_gtv23 = _trgr3;
_gtv22 = _trgr2;
digitalWrite(4, _trgr2);
digitalWrite(2, _trgr4);
_gtv24 = _trgr4;
if( (_gtv5) || (_gtv3) || (_gtv4) ) _trgr5 = 0;
if( (_gtv16) || (_gtv18) ) _trgr5 = 1;
if (_trgr5)
{
if (! _gen1I)
{
_gen1I = 1;
_gen1O = 1;
_gen1P = millis();
}
}
else
{
_gen1I = 0 ;
_gen1O= 0;
}
if (_gen1I )
{
if ( _isTimer ( _gen1P , 500 ))
{
_gen1P = millis();
_gen1O = ! _gen1O;
}
}
if( (!(_trgr5)) || (_gen1O) ) {if(! _D1B1){_lcd1.backlight(); _D1B1=1; }} else {if(_D1B1){_lcd1.noBacklight(); _D1B1=0; }}
if(_gen1O)
{_swi1=3000;}
else
{_swi1=2500;}
if(_trgr5)
{if((!_pzs1OES) || (_swi1 != _pzs1OFS)){ tone(13, (_swi1)); _pzs1OES =1;_pzs1OFS = _swi1;}} else {if(_pzs1OES){noTone(13); _pzs1OES =0; }}
_gtv20 = _trgr5;
if (1)
{
if (! _gen2I)
{
_gen2I = 1;
_gen2O = 1;
_gen2P = millis();
}
}
else
{
_gen2I = 0 ;
_gen2O= 0;
}
if (_gen2I )
{
if ( _isTimer ( _gen2P , 1000 ))
{
_gen2P = millis();
_gen2O = ! _gen2O;
}
}
if(_gen2O)
{_swi6=String("----");}
else
{_swi6=String("****");}
if (1) {
_dispTempLength1 = ((_swi6)).length();
if (_disp13oldLength > _dispTempLength1) {_isNeedClearDisp1 = 1;}
_disp13oldLength = _dispTempLength1;
_lcd1.setCursor(int((20 - _dispTempLength1)/2), 2);
_lcd1.print((_swi6));
} else {
if (_disp13oldLength > 0) {_isNeedClearDisp1 = 1; _disp13oldLength = 0;}
}
if(_gtv26){ if(!_SEEPR1OSN){ EEPROMWriteInt(0, _gtv6); _SEEPR1OSN=1;} }else{ if(_SEEPR1OSN){_SEEPR1OSN=0;}}
if(_gtv27){ if(!_SEEPR2OSN){ EEPROMWriteInt(2, _gtv7); _SEEPR2OSN=1;} }else{ if(_SEEPR2OSN){_SEEPR2OSN=0;}}
if(_gtv25){ if(!_SEEPR3OSN){ EEPROMWriteInt(4, _gtv2); _SEEPR3OSN=1;} }else{ if(_SEEPR3OSN){_SEEPR3OSN=0;}}
if(_gtv28){ if(!_SEEPR4OSN){ EEPROMWriteInt(6, _gtv8); _SEEPR4OSN=1;} }else{ if(_SEEPR4OSN){_SEEPR4OSN=0;}}
}
bool _isTimer(unsigned long startTime, unsigned long period )
{
unsigned long endTime;
endTime = startTime+period;
return (millis() >= endTime);
}
String _floatToStringWitRaz(float value, int raz)
{
float tv;
int ti = int(value);
String ts = String(ti);
if (raz == 0) {
return ts;
}
ts += ".";
float tf = abs(value - ti);
for (int i = 1; i <= raz; i++ )
{
tv = tf * 10;
ti = int(tv);
ts += String(ti);
tf = (tv - ti);
}
return ts;
}
float _convertDS18x2xData(byte type_s, byte data[12])
{
int16_t raw = (data[1] << 8) | data[0];
if (type_s)
{
raw = raw << 3;
if (data[7] == 0x10) { raw = (raw & 0xFFF0) + 12 - data[6]; }
}
else
{
byte cfg = (data[4] & 0x60);
if (cfg == 0x00) raw = raw & ~7; else if (cfg == 0x20) raw = raw & ~3; else if (cfg == 0x40) raw = raw & ~1;
}
return (float)raw / 16.0;
}
float _readDS18_ow10(byte addr[8], byte type_s)
{ byte data[12];
byte i;
_ow10.reset();
_ow10.select(addr);
_ow10.write(0xBE);
for ( i = 0; i < 9; i++) {
data[i] = _ow10.read();}
_ow10.reset();
_ow10.select(addr);
_ow10.write(0x44, 1);
return _convertDS18x2xData(type_s, data);}int EEPROMReadInt(int p_address)
{
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00);
}
void EEPROMWriteInt(int p_address, int p_value)
{
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> 8) & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
Как работает система.
При подаче питания на контроллер, из EEPROM вычитываются уставки порогов включения ступеней вентиляторов шкафов, и аварийной сигнализации.
Каждые 5 секунд считываются данные из датчиков и отображаются на дисплее. При превышении температуры в шкафу первого порога включается первый вентилятор, второго порога – второй, а при превышении порога аварийной температуры включается двухтональная звуковая сигнализация и начинает моргать подсветка дисплея. Квитирование аварии происходит при нажатии любой из кнопок. При падении температуры ниже уставки отключения вентиляторов оба вентилятора останавливаются.
При каждом нажатии кнопки “Меню” на экран дисплея выводится последовательно все уставки. Каждую уставку можно изменить кнопками “Прибавить” и “Убавить”. При этом новое значение уставки сразу записывается в EEPROM.
Если в течение 1 минуты не производить никаких действий с кнопками происходит переход на основной экран индикации температуры
При нажатии сразу трех кнопок все уставки сбрасываются на начальные значения, записанные в программе. Это необходимо при первом запуске контроллера, когда в EEPROM находятся непредсказуемые значения. У меня, например, аварийная температура оказалась 387 градусов, и я бы очень устал ее сваливать до 35 градусов нажатиями на кнопку “Убавить”.
Запуск системы на столе и прогрев датчиков феном показал работоспособность программы.

Были установлены датчики и проложены кабеля до шкафов
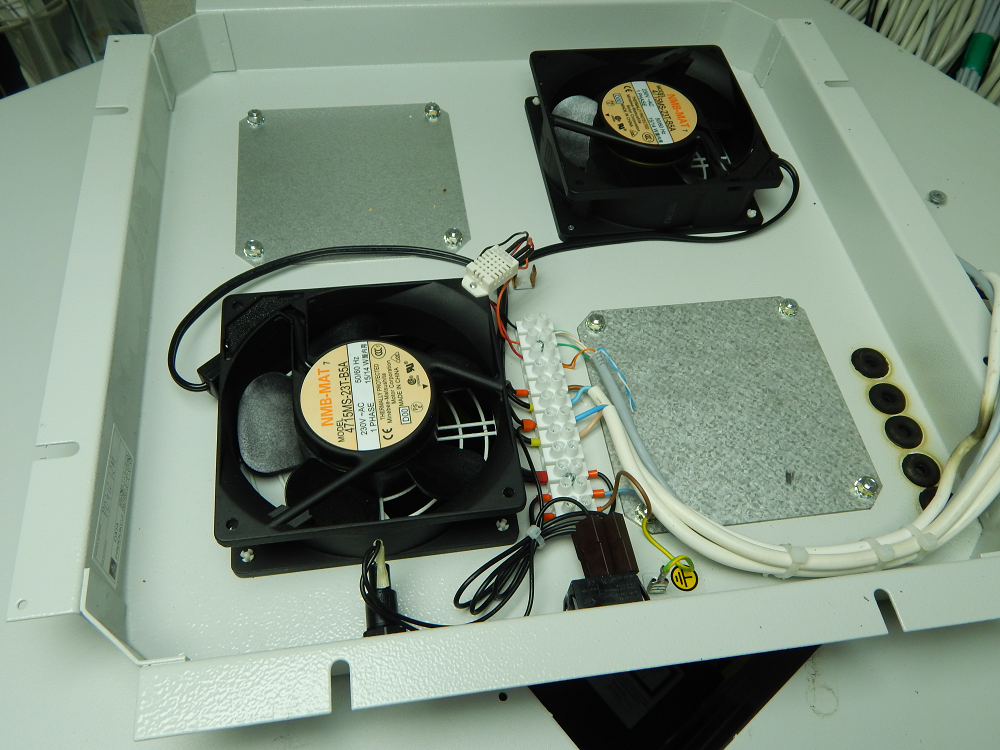

Во время пробной эксплуатации выяснились следующая тонкость.
Во первых, ни в коем случае нельзя прокладывать кабеля к датчикам вместе с кабелями к вентиляторам. Я совершил эту ошибку, понадеявшись на малые токи вентиляторов. В результате время от времени при остановке вентилятора контроллер зависал. После разнесения кабелей на расстояние друг от друга эти зависания прекратились. Возможно так же помогло – бы применение экранированных проводов к датчикам, но таковых в наличии не было.
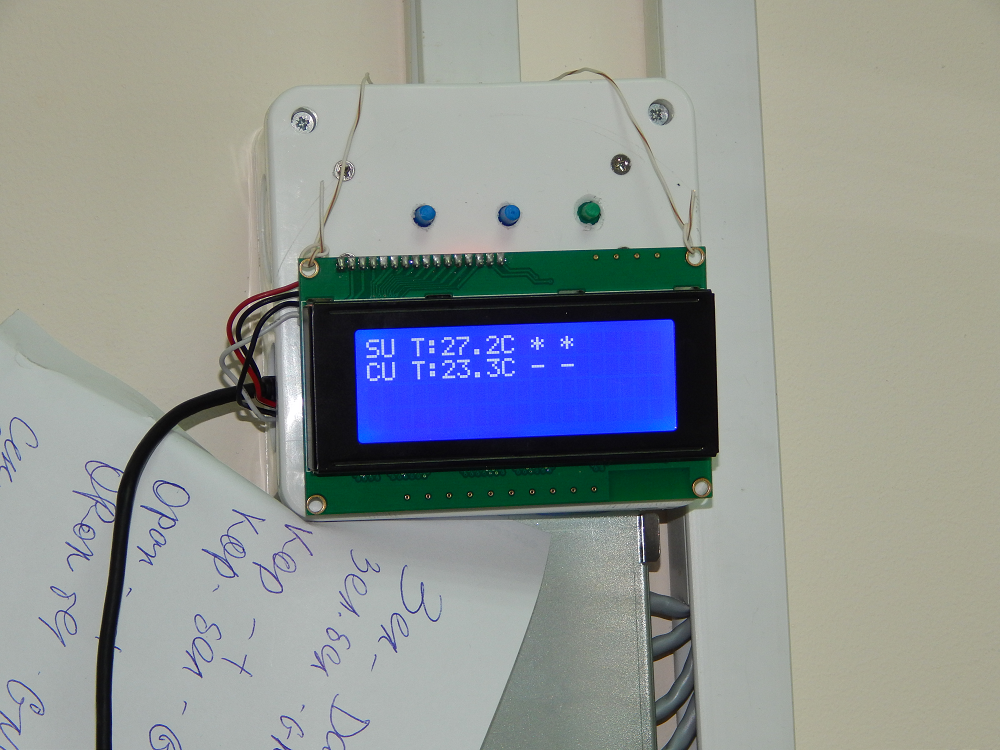
Прошу не обращать внимание на оригинальное крепление дисплея, но я посчитал слишком жирно ставить четырехстрочный дисплей на постоянную основу, и на следующей вахте заменю его на двухстрочный.
На текущий момент система работает третью неделю без зависанй и отказов 24/7.
Теперь немного гик-порно. Я не удержался и распотрошил сгоревший датчик DHT-22. Внутри он оказался очень умным.