Приветствую всех читателей!
Ещё летом этого года меня захлестнула идея создания нескольких миниатюрных роботов и научить их общаться между собой. Когда создаёшь одного робота, то у него уже предопределён основной набор функций и остальной функционал определяется только размером бюджета. :) Коллективный разум интереснее, потому что при стандартных способностях робота (объезд препятствия, рассчёт пройденного расстояния и пр.) можно установить на него средства связи с другими такими же роботами. И вместе они уже могли бы решать задачи на которые тратилось бы больше времени, если бы они решали их по одиночке (пример: поиск маршрута из т. А в т. Б).
И я по мере возможностей буду описывать ход своих работ в этом направлении.
С чего всё начиналось.
Нужно было определяться прежде всего с механикой, потому как от неё, главным образом, зависели габариты робота. На просторах Сети был найден хороший магазин, который поставляет запчасти для роботостроителей: www.sparkfun.com
Хотелось делать качественную модель и потому там были заказаны двигатели с редукторами:

колёса к ним:

и, до кучи, несколько таких датчиков:

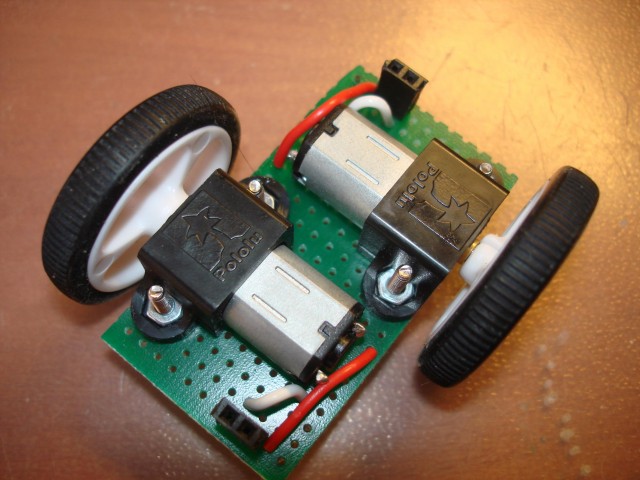
Самого робота было решено собирать по принципу «сандвича».
На первом «слое» располагались двигатели и драйвер:

На втором слое находился контроллер и прочая электроника:
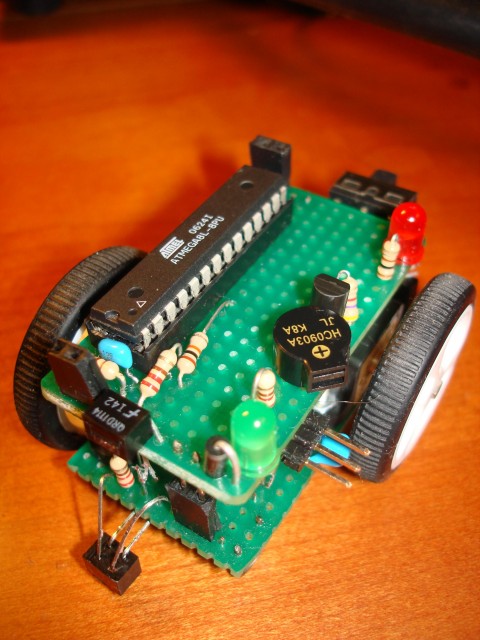
Так как схема связи не была ещё отработана, то на ранней стадии робот выглядел так:

Размеры были довольно миниатюрные: 55х50 мм.
«Муравей» обладай следующими функциями:
- обнаружение препятствий
- обнаружение края поверхности
- датчик света (при отсутствии света начинал его искать, бегая быстрее)
- индикаторы «настроения»
- звуковые сигналы
Видео робота:
Что же дальше
А дальше я разрывался над двумя проектами — этим и над гусеничным роботом, про который можно прочитать здесь: habrahabr.ru/blogs/DIY/76128
Потому «слой» со схемой связи подзаглох, а сам робот начал разваливаться из-за не очень качественной монтажной платы.
Идея немного подзабылась из-за начала семестра и времени не очень хватало. А сейчас я вновь загорелся этой мыслью И по-тихонью возобновляю работу над проектом. Схема будет изменена, моторы буду располагать соосно и корпус буду изготавливать из тонкого текстолита. Самым главным принципом, будет то, что все схемы не будут изготовлены на печатных платах, а будут располагаться «на весу», чтобы придать роботу большей «бионичности» что-ли. :)
Так же аккумулятор был избавлен от своего пластмассового корпуса, отчего и уменьшился в размерах.
Сейчас работаю на теорией работы схемы связи.
Суть её в том, что по периметру робота располагаются передатчики, который отсылают разные сигналы и приёмники для приёма сигналов от других роботов. Так как сигналы разные, то роботы могут определять своё местоположение друг относительно друга и соответственно двигаться в нужные стороны, а точность перемещения будет определяться установленными энкодерами.
Собственно пока на этом всё. После Нового Года опубликую следующие этапы своей работы.
Спасибо всем!







