Приветствую вас, глубокоуважаемые!
«… истинное место судна хотя и неизвестно, но оно не случайно, оно есть, но неизвестно в какой точке» Алексишин В. Г. и др. Практическое судовождение, 2006. стр. 71
«С двух краев галактики вышли пешеходы...» (С) Сергей Попов (Астрофизик)В свете новых тенденций
- расстояние между двумя географическими точками
- определение точки по известной, расстоянию до нее и азимутальному углу
- определение положения точки по измеренным дальностям до известных точек (TOA, TOF)
- определение положения точки по измеренным временам прихода сигнала (TDOA)
Все это на C#, Rust и Matlab, на сфере и эллипсоидах, с картинками, графиками, исходным кодом — под катом.
А это, релевантная КДПВ:
Для тех, кто спешит (я и сам такой), вот репозиторий на GitHub, где лежат все исходники с тестами и примерами.
Репозиторий организован очень просто: библиотека на данный момент представлена на трех языках и каждая реализация лежит в своей папке:
Наиболее полная реализация на C#: в отличие от остальных в ней присутствуют методы т.н. виртуальной длинной базы — это когда объект, положение которого необходимо определить неподвижен, и есть измеренные дальности до него из разных точек, с известным положением.
Чтобы посмотреть, как все работает, с какими параметрами вызывает и что возвращает, и провести разведку боем, есть разные демки и тесты:
- Тестовое консольное приложение на C#
- Тест всей библиотеки на Matlab
- Демонстрационный скрипт по TOA/TDOA с красивыми картинками на Matlab
- Скрипт на Matlab для сравнения точности решений геодезически задач на сфере (Haversine equations) и на эллипсоиде (Vincenty Equations)
- Для реализации на Rust в коде библиотеки присутствуют тесты. И можно посмотреть как все работает просто запустив команду «Cargo -test»
Я постарался сделать библиотеку как можно более независимой и самодостаточной. Чтобы при желании можно было просто взять нужный кусок (сославшись на источник, конечно), не таская за собой все остальное.
Почти всегда углы — в радианах, расстояния в метрах, время в секундах.
Теперь, начнем, пожалуй, с начала:
Геодезические задачи
Есть две типовые геодезические задачи: прямая и обратная.
Если например, я знаю свои текущие координаты (широту и долготу), а потом прошагал 1000
То есть: Прямая геодезическая задача — это нахождение координат точки по известной, дистанции и дирекционному углу.
С обратной задачей все совсем понятно — например, я определил свои координаты, а потом прошагал сколько-то по прямой и снова определил свои координаты. Найти, сколько я прошел — значит решить обратную геодезическую задачу.
То есть: Обратная геодезическая задача — это нахождение расстояния между двумя точками с известными географическими координатами.
Решать эти задачи можно несколькими способами, в зависимости от необходимой точности и времени, которое вы готовы на это потратить.
Самый простой способ — представить что земля
Вот формула для решения прямой задачи (источник):


Здесь
 ,
,  — широта и долгота исходной точки,
— широта и долгота исходной точки,  — дирекционный угол, отсчитывающийся по часовой стрелке от направления на север (если смотреть сверху),
— дирекционный угол, отсчитывающийся по часовой стрелке от направления на север (если смотреть сверху),  — угловое расстояние d/R. d — измеренное (пройденное) расстояние, а R — радиус земли.
— угловое расстояние d/R. d — измеренное (пройденное) расстояние, а R — радиус земли.  ,
,  — широта и долгота искомой точки (ту, в которую мы пришли).
— широта и долгота искомой точки (ту, в которую мы пришли).Для решения обратной задачи есть другая (не менее простая формула):


Где
, и , -координаты точек, R — земной радиус.Описанные формулы называются Haversine Equations.
- В реализации на C# соответствующие функции называются HaversineDirect и HaversineInverse и живут в Algorithms.cs.
- В реализации на Rust это функции haversine_direct и haversine_inverse.
- И наконец, на Matlab функции хранятся в отдельных файлах и вот обе функции:
HaversineDirect и HaversineInverse
Для C# я буду приводить названия функций и ссылку на файл, где они находятся. Для Rust — только названия функций (коль скоро вся библиотека лежит в одном файле), а для Matlab — ссылку на соответствующий файл скрипта, потому что в Matlab одна функция — один скрипт.
Очевидно, что здесь есть какой-то подвох: земля не сфера,
И действительно. Но для того, чтобы определиться с этим, нужно с чем-то сравнивать.
Еще в 1975 году Тадеуш Винценти (Thaddeus Vincenty) опубликовал вычислительно эффективное решение прямой и обратной геодезической задач на поверхности сфероида (известного более под ником
Описание устройства метода тянет на отдельную статью, поэтому я ограничусь лишь отсылкой на оригинальную работу Винценти и на онлайн-калькулятор с описанием алгоритма.
В библиотеке UCNLNav решение прямой и обратной геодезической задач по формулам Винценти лежит в следующих функциях:
- C#: VincentyDirect и VincentyInverse в Algorithms.cs.
- Rust: vincenty_inverse и vincenty_direct
- Matlab: Nav_vincenty_direct и Nav_vincenty_inverse.
Т.к. решение по Винценти итеративное, то в списке параметров присутствуют максимальное число итераций (it_limit), а в списке результатов — фактическое число итераций. Также присутствует порог, задающий условие остановки (epsilon). В большинстве случаев требуется не более 10 итераций, но для почти антиподных точек (как например северный и южный полюса) метод сходится плохо, и может потребоваться до 2000 итераций.
Самое важное отличие — данные формулы выполняют решение на сфероиде, и его параметры нужно передавать в функции. Для этого есть простая стуктура, которая его описывает.
Во всех реализациях можно в одну строчку получить один из стандартных эллипсоидов. (Сплошь и рядом применяется WGS84 [https://en.wikipedia.org/wiki/World_Geodetic_System] и его приведем в качестве примера):
- На C#: В Algorithms.cs есть статическое поле Algorithms.WGS84Ellipsoid — его можно передавать в методы.
- На Rust:
let el: Ellipsoid = Ellipsoid::from_descriptor(&WGS84_ELLIPSOID_DESCRIPTOR); - На Matlab:
el = Nav_build_standard_ellipsoid(‘WGS84’);
Наименование остальных параметров вполне очевидное и не должно вызвать неясностей.
Для того, чтобы понять, чего нам будет стоить применение решений для сферы вместо эллипса, реализации на Matlab присутствует скрипт.
В Matlab безумно удобно отображать всякое без лишних телодвижений, поэтому я выбрал его для демонстрации.
Логика его работы скрипта:
1. Берем точку с произвольными координатами
sp_lat_rad = degtorad(48.527683);
sp_lon_rad = degtorad(44.558815);и произвольное направление (я выбрал примерно на запад):
fwd_az_rad = 1.5 * pi + (rand * pi / 4 - pi / 8);2. Шагаем от нее на все увеличивающуюся дистанцию. Для чего сразу задаемся числом шагов и размером шага:
n_samples = 10000;
step_m = 1000; % meters
distances = (1:n_samples) .* step_m;3. Для каждого шага решаем прямую геодезическую задачу на сфере и на эллипсоиде, получая искомую точку:
[ h_lats_rad(idx), h_lons_rad(idx) ] = Nav_haversine_direct(sp_lat_rad,...
sp_lon_rad,...
distances(idx),...
fwd_az_rad,...
el.mjsa_m);
[ v_lats_rad(idx), v_lons_rad(idx), v_rev_az_rad, v_its ] = Nav_vincenty_direct(sp_lat_rad,...
sp_lon_rad,...
fwd_az_rad,...
distances(idx),...
el,...
VNC_DEF_EPSILON, VNC_DEF_IT_LIMIT);
4. Для каждого шага решаем обратные геодезические задачи — вычисляем расстояния между результатами, полученными на сфере и эллипсоиде:
[ v_dist(idx) a_az_rad, a_raz_rad, its, is_ok ] = Nav_vincenty_inverse(h_lats_rad(idx),...
h_lons_rad(idx),...
v_lats_rad(idx),...
v_lons_rad(idx),...
el,...
VNC_DEF_EPSILON, VNC_DEF_IT_LIMIT);5. Проверяем прямые решения обратными для обоих методов:
[ ip_v_dist(idx) a_az_rad, a_raz_rad, its, is_ok ] = Nav_vincenty_inverse(sp_lat_rad,...
sp_lon_rad,...
v_lats_rad(idx),...
v_lons_rad(idx),...
el,...
VNC_DEF_EPSILON, VNC_DEF_IT_LIMIT);
ip_h_dist(idx) = Nav_haversine_inverse(sp_lat_rad,...
sp_lon_rad,...
v_lats_rad(idx),...
v_lons_rad(idx),...
el.mjsa_m);В скрипте эта последовательность выполняется сначала для шага = 1000 м, а потом для шага = 1 метр.
Сначала посмотрим, насколько отличаются результаты прямых решений по координатам (широте и долготе), для чего вычислим векторы «дельт», благо на Matlab все пишется в одну строчку:
d_lat_deg = radtodeg(v_lats_rad - h_lats_rad); % дельты по широте (в градусах)
d_lon_deg = radtodeg(v_lons_rad - h_lons_rad); % дельты по долготе (в градусах)
По оси абцисс будем отображать в логарифмическом масштабе, т.к. у нас расстояния меняются от 1 до 10000 км:
figure
semilogx(distances, d_lat_deg, 'r');
title('Direct geodetic problem: Vincenty vs. Haversine (Latitude difference)');
xlabel('Distance, m');
ylabel('Difference, °');
figure
semilogx(distances, d_lon_deg, 'r');
title('Direct geodetic problem: Vincenty vs. Haversine (Longitude difference)');
xlabel('Distance, m');
ylabel('Difference, °');В результате получаем такие графики для широты:

И для долготы:

Я плохо понимаю в градусах, всегда руководствуюсь методом для прикидки «на глазок»:
1° чего-нибудь это в среднем 100-110 км. И если ошибка больше миллионной или хотя бы стотысячной части градуса — это плохие новости.
Дальше посмотрим расстояния между исходной точкой и точкой, получаемой на каждом шаге по формулам для сферы и эллипсоида. Расстояние вычислим по формулам Винценти (как заведомо более точным — автор обещает ошибку в миллиметрах). Графики в метрах и километрах это гораздо более осязаемо и привычно:
figure
semilogx(distances, v_dist, 'r');
title('Direct geodetic problem: Vincenty vs. Haversine (Endpoint difference by Vincenty)');
xlabel('Distance, m');
ylabel('Difference, m');В результате получаем такую картину:

Получается, что на дальностях 10000 км методы расходятся на 10 км.
Если теперь все повторить для шага в 1000 раз меньше, т.е. когда весь диапазон по оси Х будет не 10000 км а всего 10 км, то картина выходит следующая:

То есть, на дальности 10 км набегает всего 20 метров, а на 1-2 метра формулы расходятся только на дистанциях порядка 1000 метров.
Вывод капитана очевидность: если для задачи точность формул с решением на сфере достаточна, то используем их — они проще и быстрее.
Ну, а для тех, кому миллиметровой точности недостаточно, в 2013 году была опубликована работа с описанием решения геодезических задач с нанометровой (!) точностью. Не уверен, что могу сходу придумать, где такое может понадобится — разве что при геодезических изысканиях при постройке гравитационно-волновых детекторов или чего-то совершенно фантастического ).
Теперь перейдем к самому вкусному:
Решение навигационных задач
На данный момент библиотека умеет определять:
- Местоположение объекта по дальностям до точек, с известными координатами в 2D и 3D. Такое мы называет TOA — Time Of Arrival (или что более правильно TOF — Time Of Flight)
- Местоположение объекта по разностям времен прихода в 2D и 3D. Такое мы называем TDOA (Time Difference Of Arrival).
В реальности мы всегда измеряем дальности или времена прихода сигнала (а соответственно, и их разности) с ошибками, с шумом. Поэтому решение навигационных задач в подавляющем числе случаев — это минимизация ошибки. Метод наименьших квадратов
То, что нужно минимизировать, называется функцией невязки.
Для задач TOA она выглядит так:
![$argmin\epsilon(x,y,z)=\sum_{i=1}^{N}[\sqrt{(x-x_i)^2+(y-y_i)^2+(z-z_i)^2)}-r_i]^2$](https://habrastorage.org/getpro/habr/formulas/a23/7f1/106/a237f1106ae7a16001db5ac4651aa18d.svg)
Где
 — значение функции невязки для некоей точки с координатами
— значение функции невязки для некоей точки с координатами  ; N — число опорных точек, имеющих координаты
; N — число опорных точек, имеющих координаты  ,
,  — измеренные расстояния от опорных точек до позиционируемого объекта.
— измеренные расстояния от опорных точек до позиционируемого объекта.А для задач TDOA вот так:
![$argmin\epsilon(x,y,z)=\sum_{i=1,j=2,i\neq j}^{N}[\sqrt{(x-x_i)^2+(y-y_i)^2+(z-z_i)^2)}- \\ \sqrt{(x-x_j)^2+(y-y_j)^2+(z-z_j)^2)}-\nu(t_{Ai}-t_{Aj})]^2 $](https://habrastorage.org/getpro/habr/formulas/461/035/28d/46103528d160551c712f968bebf9d8ae.svg)
Здесь все тоже самое, только рассматриваются разные пары опорных точек и соответствующие времена прихода
 и
и  , а
, а  — скорость распространения сигнала.
— скорость распространения сигнала. А вот так эти функции выглядят в коде:
На C#:
/// <summary>
/// TOA problem residual function
/// </summary>
/// <param name="basePoints">base points with known locations and distances to them</param>
/// <param name="x">current x coordinate</param>
/// <param name="y">current y coordinate</param>
/// <param name="z">current z coordinate</param>
/// <returns>value of residual function in specified location</returns>
public static double Eps_TOA3D(TOABasePoint[] basePoints, double x, double y, double z)
{
double result = 0;
double eps = 0;
for (int i = 0; i < basePoints.Length; i++)
{
eps = Math.Sqrt((basePoints[i].X - x) * (basePoints[i].X - x) +
(basePoints[i].Y - y) * (basePoints[i].Y - y) +
(basePoints[i].Z - z) * (basePoints[i].Z - z)) - basePoints[i].D;
result += eps * eps;
}
return result;
}
/// <summary>
/// TDOA problem residual function
/// </summary>
/// <param name="baseLines">base lines, each represented by two base points with known locations and times of arrival</param>
/// <param name="x">current x coordinate</param>
/// <param name="y">current y coordinate</param>
/// <param name="z">current z coordinate</param>
/// <returns>value of residual function in specified location</returns>
public static double Eps_TDOA3D(TDOABaseline[] baseLines, double x, double y, double z)
{
double result = 0;
double eps;
for (int i = 0; i < baseLines.Length; i++)
{
eps = Math.Sqrt((baseLines[i].X1 - x) * (baseLines[i].X1 - x) +
(baseLines[i].Y1 - y) * (baseLines[i].Y1 - y) +
(baseLines[i].Z1 - z) * (baseLines[i].Z1 - z)) -
Math.Sqrt((baseLines[i].X2 - x) * (baseLines[i].X2 - x) +
(baseLines[i].Y2 - y) * (baseLines[i].Y2 - y) +
(baseLines[i].Z2 - z) * (baseLines[i].Z2 - z)) - baseLines[i].PRD;
result += eps * eps;
}
return result;
}
На Rust:
pub fn eps_toa3d(base_points: &Vec<(f64, f64, f64, f64)>, x: f64, y: f64, z: f64) -> f64 {
let mut result: f64 = 0.0;
for base_point in base_points {
result += (((base_point.0 - x).powi(2) +
(base_point.1 - y).powi(2) +
(base_point.2 - z).powi(2)).sqrt() - base_point.3).powi(2);
}
result
}
pub fn eps_tdoa3d(base_lines: &Vec<(f64, f64, f64, f64, f64, f64, f64)>, x: f64, y: f64, z: f64) -> f64 {
let mut result: f64 = 0.0;
for base_line in base_lines {
result += (((base_line.0 - x).powi(2) +
(base_line.1 - y).powi(2) +
(base_line.2 - z).powi(2)).sqrt() -
((base_line.3 - x).powi(2) +
(base_line.4 - y).powi(2) +
(base_line.5 - z).powi(2)).sqrt() - base_line.6).powi(2);
}
result
}
На Matlab:
% base_points(n, c)
% n - a base point index
% c = 1 -> x
% c = 2 -> y
% c = 3 -> z
% c = 4 -> estimated distance
function [ result ] = Nav_eps_toa3d(base_points, x, y, z)
result = 0.0;
for n = 1:length(base_points)
result = result + (sqrt((base_points(n, 1) - x)^2 +...
(base_points(n, 2) - y)^2 +...
(base_points(n, 3) - z)^2) - base_points(n, 4))^2;
end
function [ result ] = Nav_eps_tdoa3d(base_lines, x, y, z)
result = 0.0;
for n = 1:length(base_lines)
result = result + (sqrt((base_lines(n, 1) - x)^2 +...
(base_lines(n, 2) - y)^2 +...
(base_lines(n, 3) - z)^2) -...
sqrt((base_lines(n, 4) - x)^2 +...
(base_lines(n, 5) - y)^2 +...
(base_lines(n, 6) - z)^2) -...
base_lines(n, 7))^2;
end
Как можно видеть, обе функции работают с переменным числом опорных точек или линий. Вообще задачи могут быть разные, и функции невязки тоже.
Например, можно решать задачу не только определения местоположения, но и определения ориентации. В этом случае функция невязки будет содержать один или несколько углов.
Остановимся чуть более подробно на внутреннем устройстве библиотеки
На данном этапе библиотека работает с 2D и 3D задачами и сам решатель не знает и не хочет знать как выглядит минимизируемый функционал. Это достигается следующим способом.
У решателя есть две ипостаси: 2D и 3D решатели, основанные на методе Нелдера-Мида или, как еще его называют, метода Симплекса.
Так как этому методу не требуется вычисление производных (т.н. derivative-free minimization), то в идеале пользователь библиотеки может применять свои собственные функции невязки если такое потребуется. Плюс, теоретически нет никакого верхнего ограничения на количество опорных точек, используемых при решении задачи.
В C# и Rust 2D и 3D Решатели — Generic-методы:
public static void NLM2D_Solve<T>(Func<T[], double, double, double, double> eps,
T[] baseElements,...
// пример вызова функции невязки в теле решателя:
fxi[0] = eps(baseElements, xix[0], xiy[0], z);
Пример вызова самого решателя:
public static void TOA_NLM2D_Solve(TOABasePoint[] basePoints,
double xPrev, double yPrev, double z,
int maxIterations, double precisionThreshold, double simplexSize,
out double xBest, out double yBest, out double radialError, out int itCnt)
{
NLM2D_Solve<TOABasePoint>(Eps_TOA3D,
basePoints, xPrev, yPrev, z,
maxIterations, precisionThreshold, simplexSize,
out xBest, out yBest, out radialError, out itCnt);
}
На Rust…
pub fn nlm_2d_solve<T>(eps: Eps3dFunc<T>, base_elements: &Vec<T>...
Все идентично, с точностью до синтаксиса языка.
В Matlabe же, с присущим ему волюнтаризмом, сам решатель понятия не имеет что за базовые элементы ему передаются — пользователь сам должен позаботиться, чтобы передаваемые в решатель ссылка на функцию невязки и набор опорных элементов были совместимы:
function [ x_best, y_best, rerr, it_cnt ] = Nav_nlm_2d_solve(eps, base_elements, ....
И соответственно, вызов решателя выглядит так:
function [ x_best, y_best, rerr, it_cnt ] = Nav_toa_nlm_2d_solve(base_points, x_prev, y_prev, z,...
max_iterations, precision_threshold, simplex_size)
[ x_best, y_best, rerr, it_cnt ] = Nav_nlm_2d_solve(@Nav_eps_toa3d, base_points, x_prev, y_prev, z,...
max_iterations, precision_threshold, simplex_size);
end
Для демонстрации решения TOA и TDOA задач есть специальный скрипт на Matlab.
Демонстрация в 2D выбрана не случайно — я не уверен что могу придумать, как просто и информативно отобразить трехмерную функцию невязки =)
Итак. В начале скрипта есть параметры, которые можно менять:
%% parameters
n_base_points = 4; % число опорных точек
area_width_m = 1000; % размер области
max_depth_m = 100; % максимальная глубина (координата Z)
propagation_velocity = 1500;% для меня привычная область - гидроакустика
max_iterations = 2000; % максимальное число итераций
precision_threshold = 1E-9; % порог точности
simplex_size = 1; % стартовый размер симплекса в метрах
contour_levels = 32; % число линий уровня для отображения
range_measurements_error = 0.01; % 0.01 means 1% of corresponding slant range
% амлитуда случайной ошибки - оптимистично примем 1%
Положение искомой точки задается случайным образом в указанной области:
%% actual target location
r_ = rand * area_width_m / 2;
az_ = rand * 2 * pi;
actual_target_x = r_ * cos(az_);
actual_target_y = r_ * sin(az_);
actual_target_z = rand * max_depth_m;
Далее, случайно располагаем опорные точки, вычисляем дистанцию от искомой до них и отображаем все:
%% base points
figure
hold on
grid on
base_points = zeros(n_base_points, 4);
for n = 1:n_base_points
r_ = area_width_m / 2 - rand * area_width_m / 4;
az_ = (n - 1) * 2 * pi / n_base_points;
base_x = r_ * cos(az_);
base_y = r_ * sin(az_);
base_z = rand * max_depth_m;
dist_to_target = Nav_dist_3d(base_x, base_y, base_z, actual_target_x, actual_target_y, actual_target_z);
base_points(n, :) = [ base_x base_y base_z dist_to_target ];
end
N =1:n_base_points;
plot3(actual_target_x, actual_target_y, actual_target_z,...
'p',...
'MarkerFaceColor', 'red',...
'MarkerEdgeColor', 'blue',...
'MarkerSize', 15);
plot3(base_points(N, 1), base_points(N, 2), base_points(N, 3),...
'o',...
'MarkerFaceColor', 'green',...
'MarkerEdgeColor', 'blue',...
'MarkerSize', 15);
for n = 1:n_base_points
line([ actual_target_x, base_points(n, 1) ], [ actual_target_y, base_points(n, 2) ], [ actual_target_z, base_points(n, 3) ]);
end
view(45, 15);
legend('target', 'base points');
title('Placement of base stations and the target');
xlabel('X coordinate, m');
ylabel('Y coordinate, m');
zlabel('Z coordinate, m');
В итоге получаем такую картинку:

Добавляем к измерениям дистанций случайные ошибки:
% adding range measurement errors
base_points(N, 4) = base_points(N, 4) + base_points(N, 4) *...
(rand * range_measurements_error - range_measurements_error / 2);
Строим функцию невязки для выбранной области с некоей децимацией — иначе расчеты могут занять ощутимое время. Я выбрал размер области 1000 х 1000 метров и считаю функцию невязки по всей области через 10 метров:
% error surface tiles
tile_size_m = 10;
n_tiles = area_width_m / tile_size_m;
%% TOA solution
error_surface_toa = zeros(n_tiles, n_tiles);
for t_x = 1:n_tiles
for t_y = 1:n_tiles
error_surface_toa(t_x, t_y) = Nav_eps_toa3d(base_points,...
t_x * tile_size_m - area_width_m / 2,...
t_y * tile_size_m - area_width_m / 2,...
actual_target_z);
end
end
figure
surf_a = [1:n_tiles] * tile_size_m - area_width_m / 2;
surf(surf_a, surf_a, error_surface_toa);
title('TOA solution: Residual function');
xlabel('X coordinate, m');
ylabel('Y coordinate, m');
view(45, 15);
Вот так выглядит функция невязки:

Я конечно немного слукавил — взаимные расположения опорных точек и искомой выбираются так, что они всегда образуют выпуклую фигуру с искомой точкой внутри. Во многом благодаря этому поверхность имеет один минимум, который находится без особых проблем.
Въедливый читатель может изменить этот порядок вещей и попробовать расставить опорные точки и искомую совершенно случайно.
Теперь отобразим все вместе. На поверхности это сделать сложно — разные величины по вертикальной оси. Поэтому удобно все нарисовать на двумерном срезе:
figure
hold on
contourf(surf_a, surf_a, error_surface_toa, contour_levels);
plot(actual_target_x, actual_target_y,...
'p',...
'MarkerFaceColor', 'red',...
'MarkerEdgeColor', 'blue',...
'MarkerSize', 15);
plot(base_points(N, 1), base_points(N, 2),...
'o',...
'MarkerFaceColor', 'green',...
'MarkerEdgeColor', 'blue',...
'MarkerSize', 15);
[ x_prev, y_prev ] = Nav_toa_circles_1d_solve(base_points, actual_target_z, pi / 180, 10, 0.1);
[ x_best, y_best, rerr, it_cnt ] = Nav_toa_nlm_2d_solve(base_points, x_prev, y_prev, actual_target_z,...
max_iterations, precision_threshold, simplex_size);
plot(x_best, y_best,...
'd',...
'MarkerFaceColor', 'yellow',...
'MarkerEdgeColor', 'blue',...
'MarkerSize', 7);
title(sprintf('TOA Solution: Residual function. Target location estimated with E_{radial} = %.3f m in %d iterations', rerr, it_cnt));
xlabel('X coordinate, m');
ylabel('Y coordinate, m');
legend('Residual function value', 'Actual target location', 'Base points', 'Estimated target location');
В результате получается примерно так:

В заголовке графика отображается радиальная ошибка — корень из финального значения функции невязки. На графике видно, что реальное местоположение и вычисленное хорошо совпадают, но масштаб не позволяет определить насколько хорошо.
Поэтому отобразим вычисленное местоположение искомой точки и реальное ее местоположение отдельно и посчитаем расстояние между ними:
figure
hold on
grid on
dx = actual_target_x - x_best;
dy = actual_target_y - y_best;
plot(0, 0,...
'p',...
'MarkerFaceColor', 'red',...
'MarkerEdgeColor', 'blue',...
'MarkerSize', 15);
plot(dx, dy,...
'd',...
'MarkerFaceColor', 'yellow',...
'MarkerEdgeColor', 'blue',...
'MarkerSize', 7);
plot(-dx * 2, -dy * 2, '.w');
plot(dx * 2, dy * 2, '.w');
d_delta = Nav_dist_3d(actual_target_x, actual_target_y, actual_target_z, x_best, y_best, actual_target_z);
title(sprintf('TOA Solution: Actual vs. Estimated location, distance: %.3f m', d_delta));
xlabel('X coordinate, m');
ylabel('Y coordinate, m');
legend('Actual target location', 'Estimated target location');
Вот как это выглядит:
Вспомним, что у нас амплитуда случайной ошибки — 1% от дальности, в среднем дальность ~200-400 метров, т.е. амплитуда ошибки составляет порядка 2-4 метров. При поиске решения мы ошиблись всего на 70 сантиметров.
Теперь по аналогии попробуем решить задачу TDOA на тех же данных. Для этого притворимся, что нам известны только времена прихода сигналов с искомой точки на опорные (или наоборот — не принципиально) — просто разделим наши дистанции на скорость распространения сигнала — важны лишь их разности а не абсолютные величины.
% since TDOA works with time difference of arriaval,
% we must recalculate base point's distances to times
base_points(N,4) = base_points(N,4) / propagation_velocity;
base_lines = Nav_build_base_lines(base_points, propagation_velocity);
Строим и рисуем поверхность ошибок:
error_surface_tdoa = zeros(n_tiles, n_tiles);
for t_x = 1:n_tiles
for t_y = 1:n_tiles
error_surface_tdoa(t_x, t_y) = Nav_eps_tdoa3d(base_lines,...
t_x * tile_size_m - area_width_m / 2,...
t_y * tile_size_m - area_width_m / 2,...
actual_target_z);
end
end
figure
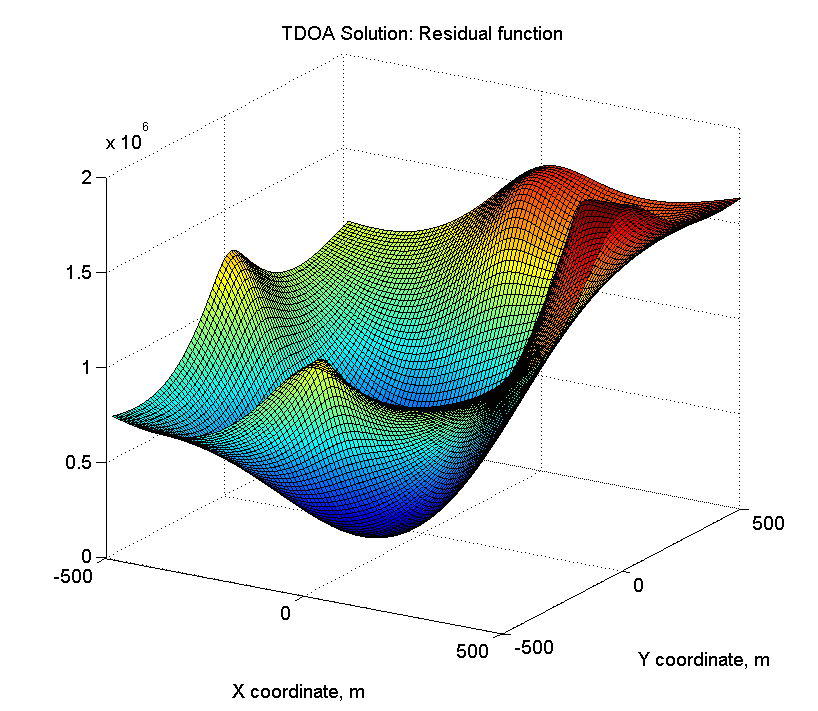
surf(surf_a, surf_a, error_surface_tdoa);
title('TDOA Solution: Residual function');
xlabel('X coordinate, m');
ylabel('Y coordinate, m');
view(45, 15);
Получается что-то такое:
И вид «сверху» с опорными точками, реальным и вычисленным положениями искомой точки:

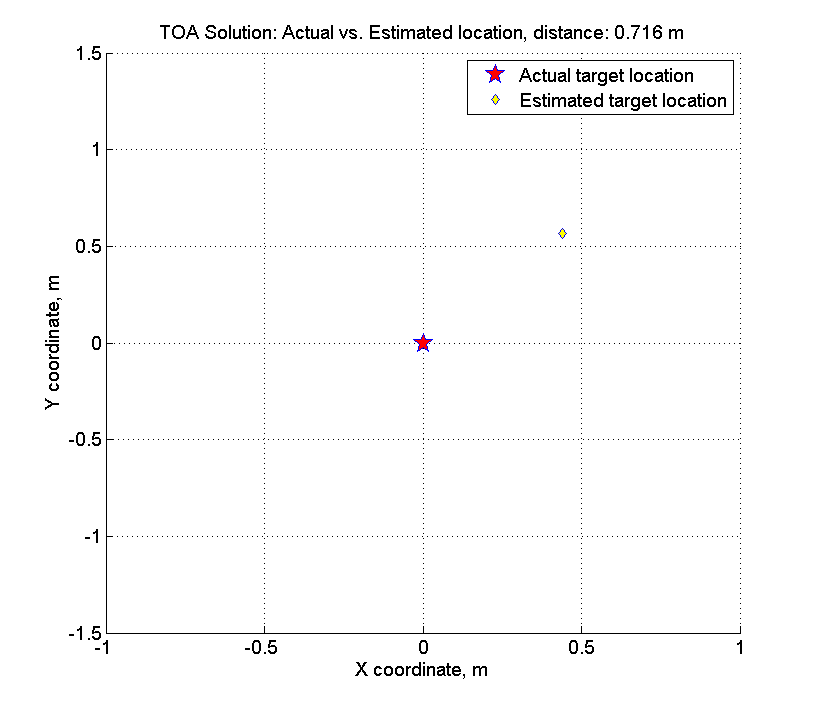
И более детально, расхождение реального и вычисленного местоположения:

В этом конкретном случае решение по TDOA оказалось даже лучше, чем по TOA — абсолютная ошибка составляет 0.3 метра.
Хорошо в модели — всегда точно знаешь, где фактически расположена искомая точка. На воздухе хуже — может быть несколько точек зрения, под водой ты просто что-то вычислил и все — в 99% случаев, чтобы вычислить отклонение от фактического местоположения, его (это местоположение) тоже сначала надо вычислить.
Теперь, в качестве заключения, объединим наши новые знания про геодезические и навигационные задачи.
Финальный аккорд
Максимально приблизим ситуацию к реальной жизни:
- пусть у нас опорные точки имеют встроенные GNSS-приемники и мы знаем только их географические координаты
- вертикальная координата нам неизвестна (3D Задача)
- мы измеряем только времена прихода сигнала от опорных точек на искомой или наоборот
Такая ситуация описана в самом последнем тесте во всех трех реализациях. Я как-то обделил Rust, и финальный пример разберу на нем.
Итак, самый последний тест в библиотеке. В качестве координат искомой точки я выбрал место в парке, где часто гуляю с собакой.
#[test]
fn test_tdoa_locate_3d() {
let el: Ellipsoid = Ellipsoid::from_descriptor(&WGS84_ELLIPSOID_DESCRIPTOR);
let base_number = 4; // 4 опорные точки
let start_base_z_m: f64 = 1.5; // координата Z первой из опорных точек
let base_z_step_m = 5.0; // у каждой следующей она будет увеличиваться на 5 метров
let actual_target_lat_deg: f64 = 48.513724 // singed degrees
let actual_target_lon_deg: f64 = 44.553248; // signed degrees
let actual_target_z_m: f64 = 25.0; // meters - внезапно, не на поверхности земли!
// generate base points via Vincenty equations
let mut base_points = Vec::new();
let start_dst_projection_m = 500.0; // первая базовая точка на расстоянии 500 метров
let dst_inc_step_m = 50.0; // каждая последующая - на 50 метров дальше
// azimuth step
let azimuth_step_rad = PI2 / base_number as f64; // опорные точки вокруг искомой
let actual_target_lat_rad = actual_target_lat_deg.to_radians();
let actual_target_lon_rad = actual_target_lon_deg.to_radians();
// signal propagation speed
let velocity_mps = 1450.0; // m/s, я привык к скорости звука в воде
// генерируем положения опорных точек
for base_idx in 0..base_number {
// текущая проекция наклонной дальности на поверхность земли
let dst_projection_m = start_dst_projection_m + dst_inc_step_m * base_idx as f64;
// азимутальный угол на текущую опорную точку
let azimuth_rad = azimuth_step_rad * base_idx as f64;
// вычисляем координаты текущей опорной точки по формулам Vincenty
let vd_result = vincenty_direct(actual_target_lat_rad, actual_target_lon_rad,
azimuth_rad, dst_projection_m,
&el,
VNC_DEF_EPSILON, VNC_DEF_IT_LIMIT);
// приращиваем координату Z
let base_z_m = start_base_z_m + base_z_step_m * base_idx as f64;
// разность вертикальных координат для определения наклонной дальности
let dz_m = actual_target_z_m - base_z_m;
// наклонная дальность по теореме Пифагора
let slant_range_m = (dst_projection_m * dst_projection_m + dz_m * dz_m).sqrt();
// добавляем опорную точку. И превращаем дальность во время поделив на скорость звука Rust приятно радует удобством!
base_points.push((vd_result.0.to_degrees(), vd_result.1.to_degrees(), base_z_m, slant_range_m / velocity_mps));
}
// если первое приближение неизвестно - все приравниваем NAN-ам
let lat_prev_deg = f64::NAN;
let lon_prev_deg = f64::NAN;
let prev_z_m = f64::NAN;
// запускаем решение
let tdoa_3d_result = tdoa_locate_3d(&base_points,
lat_prev_deg, lon_prev_deg, prev_z_m,
NLM_DEF_IT_LIMIT, NLM_DEF_PREC_THRLD, 10.0, &el, velocity_mps);
// вычисляем расстояние от реального положения искомой точки до вычисленного
let vi_result = vincenty_inverse(actual_target_lat_rad, actual_target_lon_rad,
tdoa_3d_result.0.to_radians(), tdoa_3d_result.1.to_radians(),
&el, VNC_DEF_EPSILON, VNC_DEF_IT_LIMIT);
assert!(vi_result.0 < start_dst_projection_m * 0.01, "Estimated location is farer than limit (1%): {}", vi_result.0);
assert_approx_eq!(tdoa_3d_result.2, actual_target_z_m, start_dst_projection_m * 0.05);
assert!(tdoa_3d_result.3 < start_dst_projection_m * 0.01, "Residual function greater than limit (1%): {}", tdoa_3d_result.3);
assert!(tdoa_3d_result.4 < NLM_DEF_IT_LIMIT, "Method did not converge: iterations limit exeeded {}", tdoa_3d_result.4);
}
В результате имеем:
Реальное местоположение (Lat, Lon, Z): 48.513724 44.553248 25
Вычисленное положение (Lat, Lon, Z): 48.513726 44.553252 45.6
Расстояние между точками по поверхности (м): 0.389
Разность по координате Z (м): 20.6
Совпадение «в плане» — очень хорошее, ошибка составляет всего 40 сантиметров, а по вертикальной координате — 20 метров. Почему так происходит предлагаю подумать читателям =)
P.S.
Описываемая библиотека — чисто образовательный проект, который я планирую развивать и пополнять дальше. В планах реализация на C и написание всеобъемлющей документации.
На этом разрешите откланяться, спасибо за внимание. Буду бесконечно рад любому feedback.
Надеюсь, статья и библиотека будут полезны.
Про любые ошибки (грамматические и логические) сообщайте — я исправлю.
P.P.S
На всякий случай приведу здесь ссылку на онлайн (и не только) интерпретаторы Matlab/Octave, которыми пользуюсь сам:
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Было полезно/интересно?
87.5% Да28
0% Нет0
12.5% Пойдет, можно поработать над стилем4
Проголосовали 32 пользователя. Воздержались 5 пользователей.







