Комментарии 23
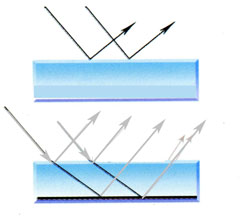
Насчет зеркал. Можно взять стоматологические зеркала с родиевым покрытием.
Примерно 150 рублей за штуку.
Без двойных отражений и с очень высокой четкости.
Примерно 150 рублей за штуку.
Без двойных отражений и с очень высокой четкости.
Мысль интересная. Только чем вот их резать? Там основа — обычное стекло?
А блины от жестких дисков не подойдут? Они отражают наружным слоем, режутся легко обычным дремелем (они из алюминия), достаются тоже легко, нужно только брать жесткие диски по старее. Я из таких дисков делал зеркала для отклонения лазерного луча.
Да, стекло. И требования очень высокие к гладкости и коэффициенту отражения. Слишком мелкая работа у стоматологов. Резать, вероятно алмазными борами из того же магазина, сошлифовывая лишнее.
Можно по-подробней про зеркала? Схема расположения, размеры?
для двух камер я использовал мультиплексер. Правда время переключения камер большое, порядка 300мс.
По вашей ссылке ценник 240TL — я так понял это Турецкая Лира? Получается около 5 000 рублей? Это как малина вместе с камерой примерно.
Ну и касательно 300 мс — да, сильно не разгонишься. У меня сейчас примерно 300-400мс выходит, но это еще не в полную силу многоядерность малинки использована. Думаю 100 мс вполне реально выжать, даже без GPU.
Ну и касательно 300 мс — да, сильно не разгонишься. У меня сейчас примерно 300-400мс выходит, но это еще не в полную силу многоядерность малинки использована. Думаю 100 мс вполне реально выжать, даже без GPU.
Выглядит очень даже круто, сам подумывал о системе зеркал для стереокамеры, чтобы с синхронизацией кадров не морочиться. Но что у вашей камеры с baseline? Я так понимаю он тут не больше 5-7 см, т.е. бесконечность у камеры начинается где-то в паре тройке метров перед ней?
Стереобаза в районе полутора-двух сантиметров. На расстоянии метра в 4-5 еще дает диверсификацию по дистанции. Текущий вариант самый маленький из тех что я пробовал — для задач малых дистанций самое то. Если базу увеличивать — вся конструкция резко вырастает в размерах и становится больше самой малины. Текущие размеры — 40х45х54 мм.
А сколько времени примерно занимает получение кадра с камеры в память малинки? Насколько я понял 300 мс это общее время?
Ну я даже не замерял этот параметр. Камера может спокойно отдавать HD или FullHD под 30 кадров в секунду. Основной поедатель времени — это само построение карты глубин.
Ясно. Спасибо. Я просто пытался получать кадры стандартными узлами ROS и у меня выходила задержка почти в 400 мс. Я собственно и решил, что транспорт видео кадров в ROS между узлами слишком ресурсоемкий.
А ROS у вас на борту малины стоял получается? Я с ним дела не имел, но есть желание попробовать.
Да, на малине (версия для Ubuntu ARM). Я пришел к выводу, что для обработки видео в ROS на arm процессорах, нужно либо делать один узел, который и получает данные с камеры и он же обрабатывает их, либо попытаться использовать технологию nodelet, которая вместо передачи сообщений между узлами копирует только указатели на данные этих сообщение. Т.е. нужно избегать передачи видео сообщений между узлами ROS.
А может лучше попробовать запустить отдельным потоком приложение для расчёта карты глубины, а потом данные перебрасывать через какой-нибудь сокет как 320х240х16? Так ROS сможет обрабатывать данные?
Да, так можно. Но по-сути узел ROS тоже отдельный поток, поэтому если там сразу будет и захват видео и обработка, то получиться тоже самое, только со стандартным транспортом сообщений.
Проект 3Dberry сейчас получил новую жизнь с новым железом — полноценная стереокамера на Raspberry. Вот первая проба запуска в ROS: habr.com/post/431092
Зарегистрируйтесь на Хабре, чтобы оставить комментарий
Зрение для робота на Raspberry Pi: карта глубин