Комментарии 24
Хм. Так и представилось — робот протягивает руку за ВУ, а ему — несколько купюр.
Не плохо.
Но 2 камеры, а обзор маловат (все надо к носу подносить, чтобы разглядеть)
Подвижность рук не плохая, но мееееедленно так он все берет.
Но 2 камеры, а обзор маловат (все надо к носу подносить, чтобы разглядеть)
Подвижность рук не плохая, но мееееедленно так он все берет.
3D картинка видать у оператора не очень 3D, он не может визуально оценить расстояние до объекта.
{kind=link}
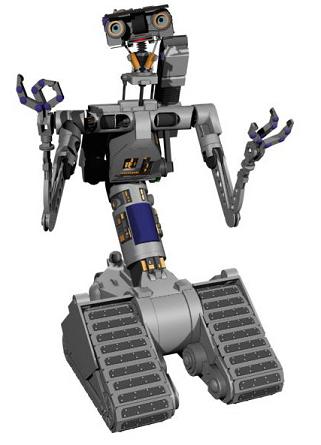
Кентавр 21го века.
НЛО прилетело и опубликовало эту надпись здесь
Интересно, если он перевернется, сможет ли с помощью рук опять принять правильное положение?
Обратная «тактильная» связь есть?
Выглядит очень мило :)
Обезвреживание ВУ роботом, управляемым по радиоканалу — как-то не надежно по моему…
напомнил Джони Пятого, колеса только непрактичные, гусиничка решает

Для серийной модели уверен нужен более менее приличный кузов на платформе что бы что-то можно было положить на нее, взять — инструмент например.
И развивая тему инструментов — 2 руки это явное пижонство для демонстрации.(для разных работ явно надо иметь набор датчиков\инструментов — для примера достаточно посмотреть на Curiosity и его универсальные манипуляторы.)
В общем ждем китайских дешовых манипуляторов и собираем себе помощников-миньонов на RasberryPI^8. ^))
И развивая тему инструментов — 2 руки это явное пижонство для демонстрации.(для разных работ явно надо иметь набор датчиков\инструментов — для примера достаточно посмотреть на Curiosity и его универсальные манипуляторы.)
В общем ждем китайских дешовых манипуляторов и собираем себе помощников-миньонов на RasberryPI^8. ^))
Зарегистрируйтесь на Хабре, чтобы оставить комментарий
Двурукая подвижная роботизированная платформа