Постановка задачи:
Достоинство статической видеокамеры заключается в том, что она позволяет непрерывно контролировать один и тот же, определенный телесный угол охраняемого пространства.Достоинство поворотной видеокамеры в том, что она позволяет контролировать телесный угол пространства, который может дистанционно изменяться оператором.
Цена поворотной видеокамеры значительно выше статической. Наша задача сделать собственную поворотную камеру с доступной ценой.

Цель работы:
Разработка алгоритмов и программно-аппаратных средств для управления процессом углового перемещения видеокамеры на базе шагового двигателя без применения высокоточной механики и техническая реализация этой системы управления на основе персонального компьютера.Поставленная цель достигается при решении следующих основных задач:
1. Анализ существующих конструктивных особенностей шаговых двигателей и способов их управления.2. Разработка алгоритмов и программно-аппаратных средств управления процессом углового перемещения (вращения) видеокамеры с применением шаговых двигателей.
3. Техническая реализация системы управления шаговым двигателем на основе персонального компьютера (ПК).
Научно-практическая значимость работы:
Разработанные алгоритмы и программно-аппаратные средства для управления вращением видеокамер с применением шаговых двигателей позволят существенно увеличить угол обзора систем видеонаблюдения на основе применения недорогих веб-камер, не имеющих высокоточной механики для их перемещения.Конструктивные особенности шаговых двигателей:
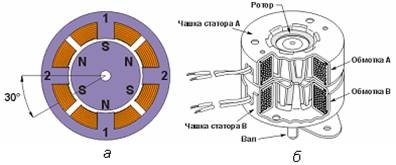
Шаговый двигатель — это электромеханическое устройство, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. В отличие от коллекторных двигателей, у которых электромеханический момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях и гораздо меньшую максимальную скорость.Наиболее распространенными являются двигатели с постоянными магнитами, которые состоят из статора, имеющего обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя.
Способы управления шаговыми двигателями:
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, поэтому всего выводов будет 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный.
Наиболее эффективным способом управления шаговым двигателем является полушаговый режим, т.е. half step mode, когда двигатель делает шаг в половину основного. Для каждого второго шага запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла основного шага, однако полушаговый режим обычно не позволяет получить полный момент.

Аппаратная реализация управления шаговым двигателем с помощью ПК:
На основе анализа был выбран шаговый двигатель ШД-1ЕМ, обладающий следующими особенностями: число шагов на 1 оборот — 200, максимальный ток обмотки 500 мА, номинальная мощность — 12 Вт.В качестве драйвера двигателя целесообразно использовать микросхему ULN2003A. Это набор транзисторов, собранных по схеме Дарлингтона с открытым коллектором и защитным диодом в цепи нагрузки. Микросхема содержит 7 каналов коммутации с током нагрузки до 500мА.
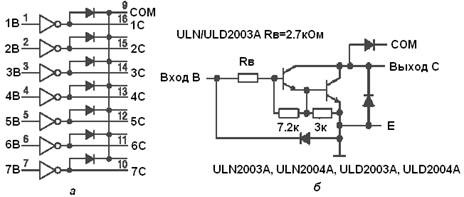
Микросхема имеет резисторы в цепи базы, что позволяет напрямую подключать ее входы к обычным цифровым микросхемам. Все эмиттеры соединены вместе и выведены на отдельный вывод. На выходах транзисторных ключей имеются защитные диоды, что позволяет управлять с помощью этой микросхемы индуктивными нагрузками при минимуме внешних компонентов.

Сигнал COM (вывод 9) подключен к источнику питания не напрямую, а через стабилитрон. Это сделано с целью защиты схемы от напряжения ЭДС самоиндукции, возникающего в катушках при выключении напряжения питания схемы. Управление микросхемой драйвера осуществляется с помощью параллельного LPT-порта персонального компьютера в режиме ECP/EPP младшими четырьмя выводами линий данных (D0-D3).
Особенности алгоритмов управления шаговым двигателем:
Для полушагового управления двигателем необходимо в соответствии со схемой устанавливать на выводах D0, D1, D2, D3 LPT порта ПК напряжение +5В, что соответствует подачи на них логических единиц в определенной последовательности, определяющей направление вращения двигателя.
Сигналы подаются через определённые интервалы времени, которые задаются программно с помощью функции остановки потока программы (SLEEP) и зависят от времени, за которое должна произойти отработка команды вращения.
Программная реализация:
В качестве языка программирования используется среда Delphi, поскольку она обладает простым синтаксисом, удачно демонстрирует парадигмы процедурного программирования и ООП, а также обладает простой и понятной архитектурой стандартных библиотек.Для работы с коммуникационным портом LPT под управлением операционной системы Microsoft Windows используются две функции WinAPI — Inp32 и Out32, входящие в состав стандартной библиотеки inpout32.dll.
Листинг подпрограммы, обеспечивающей прямое угловое перемещение Alpha двигателя за время T начиная с начальной позиции вала St, приведен ниже.
procedure Forward(Alpha:Real, T:Real, K:Real, var St:Integer);
const PORT=888;
const Steps:array[1..8] of Byte = (1, 3, 2, 6, 4, 12, 8, 9);
var I, DT:Integer;
begin
DT:=Round(T/(Alpha*K));
I:=0;
while (I<Trunc(Alpha*K)) do begin
Out32(PORT, Steps[St]); sleep(DT);
St:=St+1;
If (St>8) then St:=8;
I:=I+1;
end;
end;Заключение:
На базе выполненных разработок осуществлена техническая реализация системы управления шаговым двигателем ШД-1ЕМ на основе персонального компьютера для управления угловым перемещением web-камерой Logitech QuickCam имеющей следующие характеристики: видеозахват в режиме реального времени со скоростью до 30 кадров в секунду с разрешением 640х480 пикс.Список литературы:
1. Дамьяновски В. CCTV библия охранного телевидения. Цифровые и сетевые технологии". Ай-Эс-Эс-Пресс, 2006. — 480с.
2. Дубровский И.Л., Дамбраускас А.П., Рыбин А.А. Микропроцессорное управление электроприводами промышленных роботов: учебное пособие/; — Красноярск, КГТУ, 1993 — 88с.
3. Кенио Такаши. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ., М.: Энергоатомиздат, 1987 — 199с.
4. Лебедев Н.И., Гандшу В.М., Явдошак Я.И. Вентильные электрические машины. Спб.: Наука, 1996. — 352с.
5. Шаговые двигатели. Мотор-редукторы: портал [Электронный ресурс]. — Режим доступа: stepmotor.ru
P. S. Проект был реализован и описан в декабре 2008 года в рамках конкурсов школьных работ. Первый раз статья была опубликована в песочнице. После чего копии стали появляться в сети. Со второго раза её опубликовали.








