В прошлый раз в статье "АСУДД: Что висит над дорогой?" мы бегло прошлись по «железу», которое устанавливается на транспортных магистралях: по типам детекторов транспортного потока, светодиодным табло и дорожным контроллерам.
Сегодня мы продолжим говорить об управлении трафиком, но уже в городе. Рассмотрим из чего состоит цикл светофорного регулирования, чем именно «рулят» управляющие системы и с чего это все, собственно, началось.
Я долго не решался начать писать этот пост, так как тема управления трафиком на городских улицах настолько объемная и разносторонняя, что рассуждая о ней постоянно рискуешь оказаться в роли «ламера» в смежных областях. Но я все же рискну и попробую.
Для того, чтобы понимать чем именно «подруливают» управляющие алгоритмы, необходимо знать пять базовых определений светофорного регулирования.
Открываем учебник «Технические средства организации дорожного движения» г-на Кременца и читаем определения (американские аналоги терминов указаны в скобках):
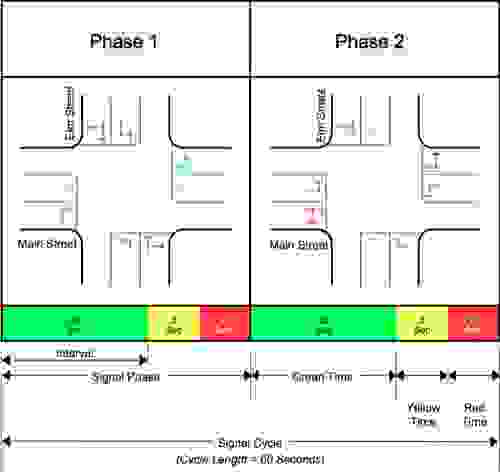
Вот картинка, которая хорошо иллюстрирует понятие цикла, фазы и интервала:
Теперь открываем американскую книжку "Traffic Control Systems Handbook". Американцы добавляют еще два определения, имеющих ключевое значение для автоматизации процесса регулирования:
Секция регулирования (Split). Процент цикла регулирования, выделенный каждой из фаз регулирования.
Грубо говоря, варьируя процент времени на фазу, можно управлять длительностью зеленого сигнала на наиболее нагруженном направлении. На отдельно стоящем перекрестке это дает уменьшение задержек.
Смещение (Offset). Разница (в секундах или процентах от цикла регулирования) между часами на конкретном перекрестке и мастер-часами (на сети перекрестков).
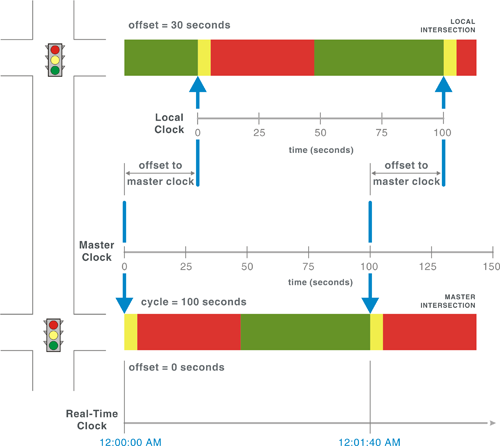
Так как термин звучит немного заумно, вот картинка, которая его очень хорошо иллюстрирует.

Видно, что фазы на соседнем перекрестке смещены относительно предыдущего. Времени смещения как раз хватает, чтобы группа автомобилей успела подъехать к нему и проскочить на зеленый. Расчет выполняется обычно для какой-то средней принятой в данном регионе скорости. Поэтому «гонщики» и «тормоза» как правило на таких магистралях обламываются.
Вот здесь можно прочитать обо всем упомянутом подробно. Оттуда же и последняя картинка.
Основные типы «умных» светофоров интересно рассмотреть в исторической перспективе, так как появлялись они не сразу и развивались от простого к сложному.
Автомобильные светофоры пришли к нам от железнодорожников. Первый электрический светофор с ручным управлением в США был установлен в Кливленде в 1914 году. А уже через три года, в 1917 году в Солт Лейк Сити была сконструирована система, управляющая светофорами сразу на шести перекрестках. Роль дорожного контроллера выполнял регулировщик. В 1922 году в Хьюстоне сделали то же самое, но уже на двенадцати перекрестках. Управление велось в ручном режиме из специальной башни.
Концепция автоматического светофора была предложена в 1928 году. Его мог установить и настроить любой электрик и все принялись закупать и устанавливать такие светофоры. Но сразу же возникли проблемы в больших городах, где существуют утренние и вечерние часы пик, в которые хорошо бы поменять планы координации светофоров, чтобы не создавались пробки. В полный рост встали проблемы нехватки персонала для этого ответственного дела. Пытливый американский разум задумался над дальнейшим совершенствованием дорожной автоматики.
В период с 1928 по 1930-й годы изобретатели предложили различные конструкции детекторов давления, определяющих наличие автомобилей на перекрестке. Это позволило сделать первые модели светофоров, реагирующих на транспорт (traffic-actuated). Такие светофоры давали эффект на магистралях, где красный по главному ходу включался только если со стороны второстепенной дороги подъезжала машина. Такие системы стоят в США до сих пор и неплохо справляются со своей задачей на изолированных перекрестках. Похожим образом работают и пешеходные вызывные кнопки, при нажатии на которую в следующий цикл регулирования встраивается пешеходная фаза.
В 1952 году в Денвере установили первый аналоговый контроллер, который позволил объединить несколько разрозненных перекрестков в единую управляемую сеть и переключать заранее рассчитанные планы координации в зависимости от времени суток и дней недели. В последующее десятилетие несколько сотен подобных систем было проинсталлировано по всему миру.
Подобные системы активно использовали параметр смещения, включая зеленый не сразу на всех перекрестках, а со смещением, зависящим от расстояния между перекрестками и параметров транспорта («зеленая волна»). Специально обученный инженер рассчитывал и рисовал на бумажке схемы координации, которые потом закладывались в контроллеры. Система оказалась настолько простой и надежной, что активно используется до сих пор в городах, не обремененных излишним трафиком.
В 1960 году в Торонто для управления светофорами установили первый «настоящий» компьютер – шикарный агрегат IBM 650 с барабанной памятью на 2000 машинных слов. Это был колоссальный прорыв в технологиях управления дорожным движением! Через три года под централизованным управлением находились более 20 перекрестков, а к 1973 году компьютер управлял уже 885 перекрестками!
Видя столь явный успех, IBM продолжила работать над использованием своих компьютеров в управлении светофорами. В 1964 году стартовал проект в центре Сан Хосе с компьютером IBM 1710, а в 1965 для города Вичита Фоллс (Техас) был установлен IBM 1800 (продвинутая версия модели 1130 с увеличенным количество портов ввода/вывода), который успешно управлял 85 перекрестками. Компьютер в Сан-Хосе также был заменен впоследствии на IBM 1800. Система оказалась настолько удачной, что данную конфигурацию стали использовать во многих американских городах от Остина и Портленда до Нью Йорка.
Вот он, легендарный аппарат IBM 1800 (источник картинки)

Работа над стандартизацией систем управления светофорами стартовала в 1967 году. В рамках пилотного проекта построили управляющую систему для Вашингтона, которая включала 113 перекрестков, оснащенных 512 детекторами транспорта на основе индуктивной петли. Компьютер получил возможность не только вслепую переключать планы координации, но и получать информацию о транспортных очередях на перекрестках (тогда еще допплеровские радары для измерения скорости потока не использовали).
Короче говоря, критическая масса подключенных к компьютерам светофоров была достигнута, и переход от количества к качеству был лишь делом времени. Начались масштабные исследования в области разработки управляющих алгоритмов.
Идея иметь планы координации на все случаи жизни в теории была неплоха, но на все случаи жизни, как оказалось, планов не напасешься. Разработка каждого плана в 70-х производилась на бумаге и была довольно трудоемким и творческим процессом. И если для длинной улицы со светофорами, наподобие Ленинского проспекта в Москве, рассчитать алгоритмы было довольно легко, то на сети улиц это была уже совсем нетривиальная задача. Там более, что городов много, и не все из них могут себе позволить держать в штате грамотного транспортно инженера.
И вот в 70-х британское исследовательское бюро TRRL (The Transport and Road Research Laboratory) разработало и внедрило на улицах Глазго систему SCOOT (Split, Cycle and Offset Optimization Technique), которая позволяла «играться» параметрами цикла светофорного регулирования в определенных границах в зависимости от информации транспортных детекторов, измеряющих наличие и длину очередей на светофорах. SCOOT совмещала преимущества фиксированных планов координации для сети и адаптивного управления, когда «умный» светофор сам «подруливает» циклом и длительностями зеленых сигналов. SCOOT в 80-х имел ряд успешных внедрений в Европе и Северной Америке. Более того, сейчас этот алгоритм (уже в третьем поколении) лицензирован более чем 100 компаниям для использования в составе своих систем.
SCOOT в третьем поколении показывает чудеса изощренного управления: он умеет обрабатывать нестандартные ситуации, растаскивать заторы, сглаживать последствия вмешательства в транспортный поток регулировщиков и временных перекрытий движения, которые так любят устраивать в сами знаете какой стране.
Одновременно со SCOOT как грибы после дождя в 70-е и 80-е годы стали появляться аналогичные системы управления. Австралийская система SCATS (Sydney Coordinated Adaptive Traffic System) стала основным конкурентом британцев и также широко внедрялась во всем мире. Как и SCOOT, SCATS относится к системам, «чувствительным» к трафику (traffic responsive).
Также развивались и полностью адаптивные алгоритмы управления (traffic adaptive), который представляли в мире OPAC (Optimized Policies for Adaptive Control) и RHODES, разрабатываемый Аризонским универом.
Сейчас разница в эффективности управления между адаптивными и «чувствительными» системами практически стерлась. Подобно гонке интернет браузеров, эти «тупоконечники» и «остроконечники» постоянно проводят исследования, чтобы доказать эффективность именно своего алгоритма, но отчеты независимых экспертов говорят о том, что в общем разницы-то особой нет.
Зато сейчас с развитием и удешевлением компьютерной техники появились возможности повышения живучести систем управления. Часть управляющей логики стали зашивать непосредственно в дорожные контроллеры, которые даже в случае обрыва связи с центром не терялись и начинали объединяться в управляющие кластеры с соседними контроллерами. В условиях территориально распределенных систем управления обрыв каналов связи обычное дело, и такой бонус стал совсем не лишним.
Собирался было закруглиться на сегодня и вспомнил вдруг о том, что ни словом не упомянул российский (советский) опыт. Итак, мне бы очень хотелось, чтобы мы были уникальны и впереди планеты всей, но это не так. Большинство отечественных работ по управлению трафиком на автодорогах основаны на переводе американской книжки 1972 года. В отличие от оборонки, эта область не отличалась уникальностью.
Работы по централизованному компьютерному управлению светофорами начались у нас в стране в начале 80-х (то есть на 20 лет позже американцев). По заданию правительства Москвы и министерства транспорта РФ в Дефаулт-сити была создана система Старт, умевшая осуществлять координированное управление светофорами. В управляющем центре трудился сервер на «солярке» с базой данных Informix. Технически система была верхом доступного нашим специалистам совершенства. Более 400 светофорных объектов по всему городу управлялись из единого центра! Но ни о каком адаптивном управлении речи не шло. Фактически, это был аналог систем, которые внедрялись по всему миру в 70-е годы до появления адаптивных алгоритмов. Потом грянули всем известные события, никак не способствовавшие развитию отечественных транспортных систем. И сегодня мы имеем в разных городах форменный зоопарк из фрагментов западных систем управления. Но будем надеяться, что со временем ситуация в этой области нормализуется и появятся более интересные комплексные реализации. Ничего ведь сложного в этом нет. Правда ведь, коллеги?
На этом предлагаю завершить обзор управляющих алгоритмов и перейти к транспортному моделированию, которое, в общем-то и наполняет всю эту технику смыслом. Мне бы хотелось рассказать в следующей публикации об использовании транспортных моделей, их разновидностях и интеграции в контур систем управления дорожным движением.
Ссылки:
SCOOT
SCATS
Почитать на ночь
Сегодня мы продолжим говорить об управлении трафиком, но уже в городе. Рассмотрим из чего состоит цикл светофорного регулирования, чем именно «рулят» управляющие системы и с чего это все, собственно, началось.
Я долго не решался начать писать этот пост, так как тема управления трафиком на городских улицах настолько объемная и разносторонняя, что рассуждая о ней постоянно рискуешь оказаться в роли «ламера» в смежных областях. Но я все же рискну и попробую.
Красный, желтый, зеленый…
Для того, чтобы понимать чем именно «подруливают» управляющие алгоритмы, необходимо знать пять базовых определений светофорного регулирования.
Открываем учебник «Технические средства организации дорожного движения» г-на Кременца и читаем определения (американские аналоги терминов указаны в скобках):
- Такт регулирования (Interval). Период действия определенной комбинации светофорных сигналов
- Фаза регулирования (Signal Phase). Совокупность основного и следующего за ним промежуточного такта
- Цикл регулирования (Signal Cycle). Периодически повторяющаяся совокупность всех фаз
Вот картинка, которая хорошо иллюстрирует понятие цикла, фазы и интервала:

Теперь открываем американскую книжку "Traffic Control Systems Handbook". Американцы добавляют еще два определения, имеющих ключевое значение для автоматизации процесса регулирования:
Секция регулирования (Split). Процент цикла регулирования, выделенный каждой из фаз регулирования.
Грубо говоря, варьируя процент времени на фазу, можно управлять длительностью зеленого сигнала на наиболее нагруженном направлении. На отдельно стоящем перекрестке это дает уменьшение задержек.
Смещение (Offset). Разница (в секундах или процентах от цикла регулирования) между часами на конкретном перекрестке и мастер-часами (на сети перекрестков).
Так как термин звучит немного заумно, вот картинка, которая его очень хорошо иллюстрирует.
Видно, что фазы на соседнем перекрестке смещены относительно предыдущего. Времени смещения как раз хватает, чтобы группа автомобилей успела подъехать к нему и проскочить на зеленый. Расчет выполняется обычно для какой-то средней принятой в данном регионе скорости. Поэтому «гонщики» и «тормоза» как правило на таких магистралях обламываются.
Вот здесь можно прочитать обо всем упомянутом подробно. Оттуда же и последняя картинка.
Как «умнели» светофоры
Основные типы «умных» светофоров интересно рассмотреть в исторической перспективе, так как появлялись они не сразу и развивались от простого к сложному.
Автомобильные светофоры пришли к нам от железнодорожников. Первый электрический светофор с ручным управлением в США был установлен в Кливленде в 1914 году. А уже через три года, в 1917 году в Солт Лейк Сити была сконструирована система, управляющая светофорами сразу на шести перекрестках. Роль дорожного контроллера выполнял регулировщик. В 1922 году в Хьюстоне сделали то же самое, но уже на двенадцати перекрестках. Управление велось в ручном режиме из специальной башни.
Концепция автоматического светофора была предложена в 1928 году. Его мог установить и настроить любой электрик и все принялись закупать и устанавливать такие светофоры. Но сразу же возникли проблемы в больших городах, где существуют утренние и вечерние часы пик, в которые хорошо бы поменять планы координации светофоров, чтобы не создавались пробки. В полный рост встали проблемы нехватки персонала для этого ответственного дела. Пытливый американский разум задумался над дальнейшим совершенствованием дорожной автоматики.
В период с 1928 по 1930-й годы изобретатели предложили различные конструкции детекторов давления, определяющих наличие автомобилей на перекрестке. Это позволило сделать первые модели светофоров, реагирующих на транспорт (traffic-actuated). Такие светофоры давали эффект на магистралях, где красный по главному ходу включался только если со стороны второстепенной дороги подъезжала машина. Такие системы стоят в США до сих пор и неплохо справляются со своей задачей на изолированных перекрестках. Похожим образом работают и пешеходные вызывные кнопки, при нажатии на которую в следующий цикл регулирования встраивается пешеходная фаза.
В 1952 году в Денвере установили первый аналоговый контроллер, который позволил объединить несколько разрозненных перекрестков в единую управляемую сеть и переключать заранее рассчитанные планы координации в зависимости от времени суток и дней недели. В последующее десятилетие несколько сотен подобных систем было проинсталлировано по всему миру.
Подобные системы активно использовали параметр смещения, включая зеленый не сразу на всех перекрестках, а со смещением, зависящим от расстояния между перекрестками и параметров транспорта («зеленая волна»). Специально обученный инженер рассчитывал и рисовал на бумажке схемы координации, которые потом закладывались в контроллеры. Система оказалась настолько простой и надежной, что активно используется до сих пор в городах, не обремененных излишним трафиком.
В 1960 году в Торонто для управления светофорами установили первый «настоящий» компьютер – шикарный агрегат IBM 650 с барабанной памятью на 2000 машинных слов. Это был колоссальный прорыв в технологиях управления дорожным движением! Через три года под централизованным управлением находились более 20 перекрестков, а к 1973 году компьютер управлял уже 885 перекрестками!
Видя столь явный успех, IBM продолжила работать над использованием своих компьютеров в управлении светофорами. В 1964 году стартовал проект в центре Сан Хосе с компьютером IBM 1710, а в 1965 для города Вичита Фоллс (Техас) был установлен IBM 1800 (продвинутая версия модели 1130 с увеличенным количество портов ввода/вывода), который успешно управлял 85 перекрестками. Компьютер в Сан-Хосе также был заменен впоследствии на IBM 1800. Система оказалась настолько удачной, что данную конфигурацию стали использовать во многих американских городах от Остина и Портленда до Нью Йорка.
Вот он, легендарный аппарат IBM 1800 (источник картинки)

Работа над стандартизацией систем управления светофорами стартовала в 1967 году. В рамках пилотного проекта построили управляющую систему для Вашингтона, которая включала 113 перекрестков, оснащенных 512 детекторами транспорта на основе индуктивной петли. Компьютер получил возможность не только вслепую переключать планы координации, но и получать информацию о транспортных очередях на перекрестках (тогда еще допплеровские радары для измерения скорости потока не использовали).
Короче говоря, критическая масса подключенных к компьютерам светофоров была достигнута, и переход от количества к качеству был лишь делом времени. Начались масштабные исследования в области разработки управляющих алгоритмов.
Идея иметь планы координации на все случаи жизни в теории была неплоха, но на все случаи жизни, как оказалось, планов не напасешься. Разработка каждого плана в 70-х производилась на бумаге и была довольно трудоемким и творческим процессом. И если для длинной улицы со светофорами, наподобие Ленинского проспекта в Москве, рассчитать алгоритмы было довольно легко, то на сети улиц это была уже совсем нетривиальная задача. Там более, что городов много, и не все из них могут себе позволить держать в штате грамотного транспортно инженера.
И вот в 70-х британское исследовательское бюро TRRL (The Transport and Road Research Laboratory) разработало и внедрило на улицах Глазго систему SCOOT (Split, Cycle and Offset Optimization Technique), которая позволяла «играться» параметрами цикла светофорного регулирования в определенных границах в зависимости от информации транспортных детекторов, измеряющих наличие и длину очередей на светофорах. SCOOT совмещала преимущества фиксированных планов координации для сети и адаптивного управления, когда «умный» светофор сам «подруливает» циклом и длительностями зеленых сигналов. SCOOT в 80-х имел ряд успешных внедрений в Европе и Северной Америке. Более того, сейчас этот алгоритм (уже в третьем поколении) лицензирован более чем 100 компаниям для использования в составе своих систем.
SCOOT в третьем поколении показывает чудеса изощренного управления: он умеет обрабатывать нестандартные ситуации, растаскивать заторы, сглаживать последствия вмешательства в транспортный поток регулировщиков и временных перекрытий движения, которые так любят устраивать в сами знаете какой стране.
Одновременно со SCOOT как грибы после дождя в 70-е и 80-е годы стали появляться аналогичные системы управления. Австралийская система SCATS (Sydney Coordinated Adaptive Traffic System) стала основным конкурентом британцев и также широко внедрялась во всем мире. Как и SCOOT, SCATS относится к системам, «чувствительным» к трафику (traffic responsive).
Также развивались и полностью адаптивные алгоритмы управления (traffic adaptive), который представляли в мире OPAC (Optimized Policies for Adaptive Control) и RHODES, разрабатываемый Аризонским универом.
Сейчас разница в эффективности управления между адаптивными и «чувствительными» системами практически стерлась. Подобно гонке интернет браузеров, эти «тупоконечники» и «остроконечники» постоянно проводят исследования, чтобы доказать эффективность именно своего алгоритма, но отчеты независимых экспертов говорят о том, что в общем разницы-то особой нет.
Зато сейчас с развитием и удешевлением компьютерной техники появились возможности повышения живучести систем управления. Часть управляющей логики стали зашивать непосредственно в дорожные контроллеры, которые даже в случае обрыва связи с центром не терялись и начинали объединяться в управляющие кластеры с соседними контроллерами. В условиях территориально распределенных систем управления обрыв каналов связи обычное дело, и такой бонус стал совсем не лишним.
А что же в России?
Собирался было закруглиться на сегодня и вспомнил вдруг о том, что ни словом не упомянул российский (советский) опыт. Итак, мне бы очень хотелось, чтобы мы были уникальны и впереди планеты всей, но это не так. Большинство отечественных работ по управлению трафиком на автодорогах основаны на переводе американской книжки 1972 года. В отличие от оборонки, эта область не отличалась уникальностью.
Работы по централизованному компьютерному управлению светофорами начались у нас в стране в начале 80-х (то есть на 20 лет позже американцев). По заданию правительства Москвы и министерства транспорта РФ в Дефаулт-сити была создана система Старт, умевшая осуществлять координированное управление светофорами. В управляющем центре трудился сервер на «солярке» с базой данных Informix. Технически система была верхом доступного нашим специалистам совершенства. Более 400 светофорных объектов по всему городу управлялись из единого центра! Но ни о каком адаптивном управлении речи не шло. Фактически, это был аналог систем, которые внедрялись по всему миру в 70-е годы до появления адаптивных алгоритмов. Потом грянули всем известные события, никак не способствовавшие развитию отечественных транспортных систем. И сегодня мы имеем в разных городах форменный зоопарк из фрагментов западных систем управления. Но будем надеяться, что со временем ситуация в этой области нормализуется и появятся более интересные комплексные реализации. Ничего ведь сложного в этом нет. Правда ведь, коллеги?
На этом предлагаю завершить обзор управляющих алгоритмов и перейти к транспортному моделированию, которое, в общем-то и наполняет всю эту технику смыслом. Мне бы хотелось рассказать в следующей публикации об использовании транспортных моделей, их разновидностях и интеграции в контур систем управления дорожным движением.
Ссылки:
SCOOT
SCATS
Почитать на ночь









