Комментарии 77
Эффективные менеджеры добрались и до Tesla.
Ждём первых атлетов в любимом виде спорта США «подай class action suit за подсовывание сильно ухудшенного товара заказавшим его».
Во первых всё равно экономия.Так же убираются все проблемы совмещения между разными типами зрения
Так же убираются все проблемы совмещения между разными типами зрения
Звучит как «давайте отрежем ногу и она больше не будет вас беспокоить».
Не видно что-то проблем в этом совмещении ни у кого.В совместимости датчиков — да. В совместимости данных — не соглашусь. Видеообъекты и радарные объекты — разные, и опознавать, что это один и тот же объект — тратить много усилий. Рассматривать окружающее как неровный фон (карта глубины) или как совокупность объектов с поведением, которое можно предсказать — разные вещи.
Это при том, что система теслы и так содержит кучу камер, изображение с которых нужно калибровать и совмещать. Не удивлюсь, если они используют бинокулярные камеры для измерения глубины, что потребует как раз очень точной калибровки.
Видеообъекты и радарные объекты — разные, и опознавать, что это один и тот же объект — тратить много усилий.
Так нет никакой необходимости опознавать, что это один и тот же объект. Система должна реагировать на препятствие, обнаруженное любым из датчиков. Камера может что-то не распознать, например, из-за неудачного освещения или окраски объекта, незаметной на с окружающем фоне. Радар наоборот, из-за неудачной для него формы объекта. Поэтому информация от датчиков должна обрабатываться независимо.
Разные версии компьютеров, значит разные конвейеры, инструкции сборки и усложнение логистики, софта, уменьшение надёжности.
Вот и получается что копеечная(относительно стоимости машины) деталь выходит производителю в кругленькую сумму.
А независимость соответственно тянет за собой разные версии компьютера.
Зачем? Это разный софт на одной и той же железяке. Каких-то там особых требований к архитектуре железа, кроме как «считать быстро и во много потоков» нет ни в одном случае, ни в другом.
Плюс такие же машины с радарами/лидарами. Они будут слепить друг друга или давать ложные данные. А значит камерами всё равно придётся всё контролировать.
Я не утверждаю, что в теслах выполняется предсказание поведения объектов. Но то, что именно такой путь перспективен — очевидно для меня.
Так нет никакой необходимости опознавать, что это один и тот же объект. Система должна реагировать на препятствие, обнаруженное любым из датчиков
ИМХО всё сложнее, ложные срабатывания могут быть тоже опасными
убираются все проблемы совмещения между разными типами зренияодин из основных принципов «безопасного разрушения» состоит как раз в использовании датчиков на разных физических принципах. Скажем, поставь хоть 18 магнитных компасов, топор под нактоузом заставит их всех врать. А радиокомпас продолжит работать (в грозу — наоборот).
Но в перспективе, думаю, правильно делают. В дорожном движении V2V даст гораздо больше, а во внедорожном радар ничего к зрению не добавит. Идея тысяч машин на небольшом участке города, и всех с радарами и лидарами не восхищает.
Его скорость определяется «узким звеном» — если датчик и его калибровка им не является, то и простоя не будет (единственное исключение — поломка конвеера).
А насчёт плюса…
Сроки ожидания нового авто у Теслы в США упали до 4-6 недель, что уже меньше многих других автопроизводителей, т.е. Тесла практически полностью удовлетворила имеющийся спрос.
Сильное ухудшение одной из самых разрекламированых фич будет означать дальнейшее снижение этого спроса — и простой конвеера.
А учитывая как отвратительно это ухудшение сделали (поставив уже купивших перед фактом что им дадут не то, что заказывали) — имиджевые потери могут сильно превышать все плюсы.
Того, который не заляпает грязе-снеговая каша, например.
Ну то есть да, белковые нейросети обычной стереопарой оптических датчиков обходятся, но всё же у них есть дворники и возможность головой двигать. А если на объектив камеры что-то прилетит — то прилетит. Хоть автоомывайку с осушением горячим воздухом ставь.
Я не слишком в теме, но логика подсказывает. Не более ли перспективно все авто на дороге объединить в сеть по единому стандарту. Это и сокращение дистанции и улучшение прокладывания пути по городу и практически полная превенция ДТП. А на самих дорогах радиометки, вживленные в асфальт. Камеры, как дополнение к этой системе.
Вот в этот асфальт, простите?

У вас логика сломалась. Она не может такого предсказывать. Разве что вы предпосылки берете какие-то неудачные.
Еще тот же старт со светофора. Реальный типичный кейс: стоишь седьмым перед красным светофором. Включается зеленый на 30 секунд. Многие водители до сих пор считают, что им влом стартовать одним потоком, вместе на зеленый. Начинает идти волна старта, причем, часто очень медленно. До сих пор иногда наблюдаю, что включается зеленый и чел только тогда начинает на ручке первую передачу включать. В итоге, даже если все ехали прямо, не факт, что ты успеешь проехать за эти 30 секунд.
И те же трамваи можно наградить радиометками. Автопилот даст ему преимущество, где надо и не будет ДТП. В том же Санк-Петербурге типичная ситуация это наезд на пассажира, высаживающегося с трамвая, стоящего на остановке без всяких островков безопасности посреди проезжей части.
Там же и говорят что переключать на передачу нужно тогда когда зажигается разрешающий сигнал светофора.
У нас в Питере такого ездока бы засигналили, обматерили, объехали, проучили, подрезали а рано или поздно кто-нибудь особенно нетерпеливый и битой бы прошелся. Сейчас инструктора в автошколах учат заранее включать передачу и трогаться вместе с потоком. Благо, большинство светофоров с секундомером.
Вы не поняли. Сколько бы вы камер не поставили на машину, робот не сможет предсказывать последствия того, что происходит за пределами дороги. Это не вопрос датчиков, это вопрос перцептивности.
Знаете, человек тоже многое не в состоянии предсказать. Тут мне на днях девочка лет пяти под колеса выскочила из-за припаркованных на дороге машин. Никаких предпосылок не было вообще. Мать вообще в 20-ти метрах смотрела в другую сторону и по телефону базарила. Благо, я там всегда медленно проезжаю. Чтобы такое предотвратить, надо еще в роддоме чипы с радиометками вживлять, как на трамваи. Так что чипироваться некоторым полезно для их же блага (злой сарказм).
Если из-за пределов дороги в ее сторону перемещается некое тело или оно перемещается по обочине, почему робота не возможно обучить? Водитель, завидев детей или пьяное тело на обочине, снизит скорость и будет готов к экстренному торможению. Тоже самое может сделать робот.
Я смотрю на мир реалистично. К сожалению полумеры здесь не сработают, здесь надо будет поменять сразу ВСЮ инфраструктуру.
Поэтому Тесла делает основной упор на камеры. Но, думаю, как мне подсказали ниже, протоколы обмена V2V и V2I постепенно будут развиваться и внедряться. А пока все просматривают новости и ждут выхода идеального «камерного» автопилота. Вот этот автопилот дополнят обменом с окружением. Будет почти идеально.
У нас в Питере такого ездока бы засигналили, обматерили, объехали, проучили, подрезали а рано или поздно кто-нибудь особенно нетерпеливый и битой бы прошелся.
Как же жутко у Вас в Питере. У нас в Волгограде/Волжском я начинаю трогаться только на зелёный уже лет 10-12. И пока ничего из этого не происходило.
Ведь если авто резко встанет из-за технической неисправности — то запаса для торможения не будет.
Ну и объединить все авто в сеть, учитывая, что радио-сети не очень-то надежны — никакого 5G не хватит. Т.е. объединить можно, но в масштабах города в полный рост встанут проблемы сильно распределенной системы.
Я бы больше поверил в некие «кластерные» сети, когда соседние авто самоорганизуются, чтобы выполнять маневры эффективнее.
Автопилот для надёжной работы будет иметь встроенную диагностику и если машина себя ведёт аномально(вибрация, ведёт в сторону, перегрев и т.п.), она или не тронется или поедет в аварийном режиме(что не факт что допустимо), предупредив остальные машины.
Помимо этого что-то может сверху упасть на авто или рядом, может обрушиться дорога, как по техническим, так и по природным причинам.
Хоть и здорово было бы жить в мире розовых пони, но реальность гораздо веселее.
Всё-таки было бы хорошо почётче определить в новости, речь идёт про лидар или радар на радиоволнах? Если речь про лидар, то у него видимость почти такая же, как у камеры, так что замена может быть оправдана. Расстояние он измеряет по-другому, чем стерео из нескольких камер, но вряд ли надёжнее.
но вряд ли надёжнее.
Я что-то сомневаюсь, что камеры могут достичь точности в сантиметры как у лидаров.
Это понятно, но автомобилю и не нужна точность в сантиметры.
Пока таких машин относительно мало, проблем нет. Но когда их большинство, они будут мешать друг другу.
А камера пассивна до тех пор, пока ей не нужна подсветка, например, ночью или в туман.
Камера чувствительнее человеческого глаза, ей штатного света фар лучше хватает. Плюс в фары/лампы можно встроить узконаправленный ИК прожектор для того чтобы не слепить другие машины.
Люди обходятся без него, потому что у нас мощнейшая система распознавания образов, предсказания, которая дополняется огромным опытом, позволяющим реагировать даже на те ситуации, которых мы не знаем. Машинное зрение не может тягаться с этим никаким местом. И то, мы наделяем машины кучей датчиков и помощников, потому что не умеем точно измерять расстояние, относительные скорости, имеем медленную реакцию, зависимы от условий видимости.
Камеры никаким местом не чувствительнее глаза. У них мизерный динамический диапазон, из-за чего свет фар ослепит их полностью. Прожектор вряд ли может быть узконаправленный. Скорее всего он будет как фары, только в ИК диапазоне. Светить максимально в даль. Заодно там можно применить современные технологии фар, которые затемняют отдельные секции, чтобы не слепить машины вокруг.
Какой процент людей сумеет отреагировать на такое?
На такое поведётся разве что не очень внимательный живой водитель.
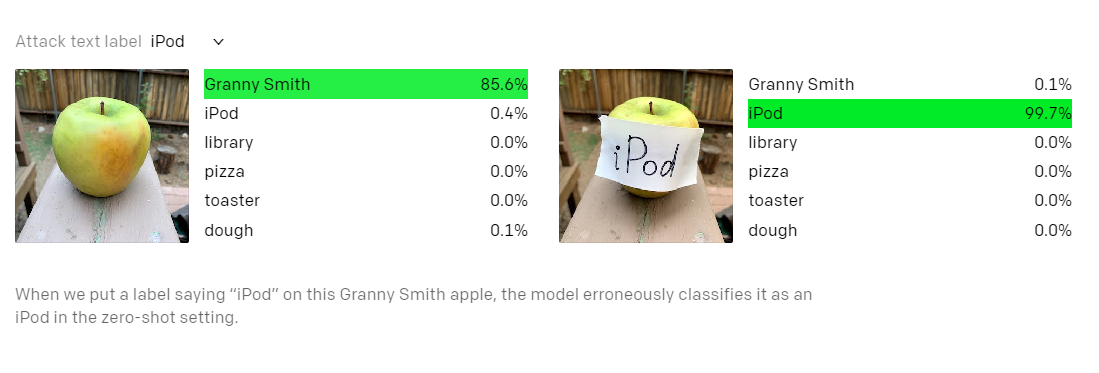
P.S. Model 3 автора с включенным автопилотом останавливается на знак STOP, нарисованный на придорожном плакате
Во вторых ваш ролик совершенно не относится к построению карты глубины, а к распознаванию билборда как знак «Стоп» и то в последний момент с определённого ракурса.
Про то что радар/лидар это тупик, я уже расписывал где то здесь. Это и цена(которая складывается не только из цены самого датчика) и сложность(чем выше тем больше шансов что что то сломается(владельцы нафаршированных авто могут подтвердить) и необходимость увеличения производительности встроенного компьютера, т.к. от камер не откажешься и в конце концов это активное оборудование, которое будет создавать помехи и слепить друг друга.
Автопилот пугает тем что он совершает аварии там, где живой человек спокойно бы проехал мимо. Но он повторяет ситуацию ни разу(в случае одного производителя и своевременной реакции), а живые водители делают одни и те же ошибки, которые ежедневно заканчиваются смертями.
И не нужно себя переоценивать, аварии часто развиваются очень стремительно, а человек имеет всего два глаза и достаточно медленный(по сравнению с компьютером) мозг и время реакции в десятки раз больше чем у компьютера. То что вы не попадали до сих пор в аварии это классическая ошибка выжившего.
Юридические трудности в переходном периоде совершенно ожидаемы. Перепишут ПДД, правила страхования, ответственность сторон. Во многих странах в ПДД пока даже не предусмотрен автопилот. В той же Тесле он до сих пор тестируется и пятой категории у него до сих пор нет, а значит и ответственность полностью на водятле который не только не держал руль, но ещё и на водительском месте его не было.
Кожаные мешки же без него обходятся.Каждый год появляется 36 тысяч человек, которые хотели бы с этим поспорить (но не могут, ибо мертвы).
И вы сильно переоцениваете камеру и недооцениваете человеческий глаз. Камера не может оценить глубину изображения.
P.S. Чем больше датчиков — тем лучше.
Софт уже давно умеет строить карту глубины по изображению с камеры. Раньше для этого нужна была стереопара, сейчас в некоторых случаях даже одной обходятся(если изображение не статично).
неправильная планировка проезжей части или целой улицы;Из них же следует, к примеру, неправильное выполнение обгона — ты не видишь, что за двумя медленными машинами впереди есть какое-то препятствие, начинаешь обгон — и попадаешь в страшную лобовую аварию, так как не можешь вернуться в свой ряд.
плохая освещённость дороги, плохая видимость;
плохое состояние дорожного полотна — ямы и выбоины
Это как раз тот случай, когда радар незаменим — он может сообщить об этом препятствии, которое никакая камера не заметит.
(и при обгоне как раз правильнее может быть ехать быстрее, чтобы поскорее завершить опасный манёвр — в том числе и с превышением скорости)
Если для обгона нужно превысить скорость, значит или машина впереди движется близко к предельно разрешённой или неверно рассчитали расстояние до встречной машины.
Автопилот же будет знать точно, в т.ч. и от едущих впереди.
Да и в мире автопилотов обгоны станут уделом спец техники.
Отличная новость. Наконец-то избавятся от радара. 8 камер с алгоритмами ИИ позволяют определят глубину с точностью до сантиметров. Избавившись от радара Тесла избавляться сразу от кучи проблем: радар очень плохо видит большие неподвижные объекты, очень низкое разрешение, проблемы с отражениями или радиопрозрачными материалами, помехи от других машин, конфликты между картинкой с радара и картинкой с камер, недостаточная дальнодействие на больших скоростях, слишком узкий луч для поворотов. Было бы не плохо если бы Тесла добавила пару камер в фарах чтобы лучше видеть на перекрёстках.
Вот есть пару моментов в которые верится с трудом.
Что будет с камерами, если их заслепят криво настроенные встречные или дальним на подъёме?
Камеры на столько крутые что уже отличают картинки от реальности? Это в Европе хорошо, рекламой дороги не усыпаны. А у нас можно увидеть огромные рекламные щиты в десять метров от дороги. А если там повесят рекламу с другой дорогой или еще чем.
Есть еще весёлые фигурки школьников возле пешеходных переходов. Тут конечно и радары с лидерами не спасут, но очень интересно как Тесла себя поведёт.
Tesla начала поставки автомобилей без датчиков радара