Всем привет! Уже почти год ничего нового не публиковалось по поводу судьбы сервисного робота Tod Bot. Однако, все это время мы не сидели сложа руки, и сегодня можем рассказать о достигнутых успехах. Данный пост не претендует на рецепт проектирования, а только лишь описывает наш путь.
Занимаясь нашим проектом, мы дошли до задач захвата предметов манипулятором. На тот момент у нас уже были решены такие задачи, как распознавание предметов и управления манипулятором. Манипулятор был сделан из конструктора и использовал обычные сервоприводы, и его грузоподъёмность и возможность управления скоростью оставляли желать лучшего(контроллер, который мы использовали, не поддерживал динамическое управление скоростью сервоприводами). Тогда перед нами стал выбор: заказать новый контроллер и использовать то, что уже есть или же решить проблему кардинально и получить манипулятор, который бы нас устраивал по всем параметрам.
Приобретать манипулятор, который бы отвечал всем требованиям даже и не думали – бешеных денег стоит. Поэтому решили пойти самым тернистым, но и сам интересным путем — сконструировать свой собственный.
Первым делом был сформирован список основных характеристик:
- Количество степеней: 7
- Грузоподъемность/Рабочий вес: 2 – 3 кг
- Длинна манипулятора: 90 см
- Вес манипулятора: 6-8 кг
Почему именно такие характеристики? Ну, начнем с веса… Так как манипулятор планируется ставить на мобильную платформу, то его масса является существенным критерием и чем легче будет манипулятор, тем лучше.
С выбором длины манипулятора ориентировались на размер руки человека с небольшим запасом, т.к. практически все предметы быта находятся на расстоянии вытянутой руки.
Рабочий вес определялся исходя из некоторой статистики. В бытовом окружении, предметы, рассчитанные на поднятие одной рукой, по своей массе находятся в пределах до 1 кг. Самым тяжелым является чайник, масса которого может достигать 2 кг или около того.
Самым интересным было определиться с количеством степеней. Для успешного захвата предмета в пространстве достаточно минимум 4-х степеней свободы. Но так как мы уже успели освоить ПО для управления манипулятором с 6 – 7 степенями и очень хотелось опробовать его на деле, то решили собрать железку для него. Такое количество степеней позволяет выполнять более сложные и функциональные движения. Как говориться, больше — не меньше.

Далее мы принялись шерстить инет и, конечно же, начали с открытых проектов, но их… их, в общем-то, по пальцам рук можно пересчитать. Все что смогли найти по характеристикам нас не устроило, включая даже такие амбициозные проекты как Inmoov. Что подтолкнуло к окончательному решению разработать свой манипулятор.
Принципиальная схема
Принцип работы манипулятора во многом зависит от устройства используемого привода. В ходе поиска были выявлены следующие варианты (изначально не рассматривали инновационные технологии, типа нагревание рыболовной лески и прочее):
- Электроприводы
- Пневмоприводы/гидроприводы
С гидравликой и пневматикой связываться не особо хотелось, да и относительно дорогое удовольствие это (цилиндры, компрессоры и т.д.). По пути использования электропривода тоже есть варианты, а именно типы электроприводов:
- Сервоприводы
- Шаговые двигатели
- Двигатели постоянного тока
Использование сервоприводов отмели сразу, т.к. те, что более доступны не подходят для заявленных характеристик по грузоподъемности, а промышленные стоят слишком дорого. С шаговыми двигателями тоже не все так гладко — они достаточно массивные в сравнении с ДПТ. В итоге, было решено остановиться на последних.
Следующим шагом мы рассмотрели различные конструкции, использующие двигатели постоянного тока, и выделили следующие варианты:
- Приводы установлены непосредственно в узлах манипулятора (места изгиба или вращения сочленений)
- Приводы вынесены за пределы узла
В последнем случае крутящий момент от двигателя может передаваться несколькими вариантами:
- Ременная передача
- Посредством тросов
- Посредством валов
При конструировании первым вариантом рассматривалось расположение приводов в узлах. После начала проектирования, когда были спроектированы первые 4 степени, стало понятно, что манипулятор не будет обладать требуемыми подъемными характеристиками. Масса манипулятора распределяется по всей его длине, а как известно из физики по закону рычага: чем дальше груз от точки приложения силы, тем больше этой самой силы нужно приложить.
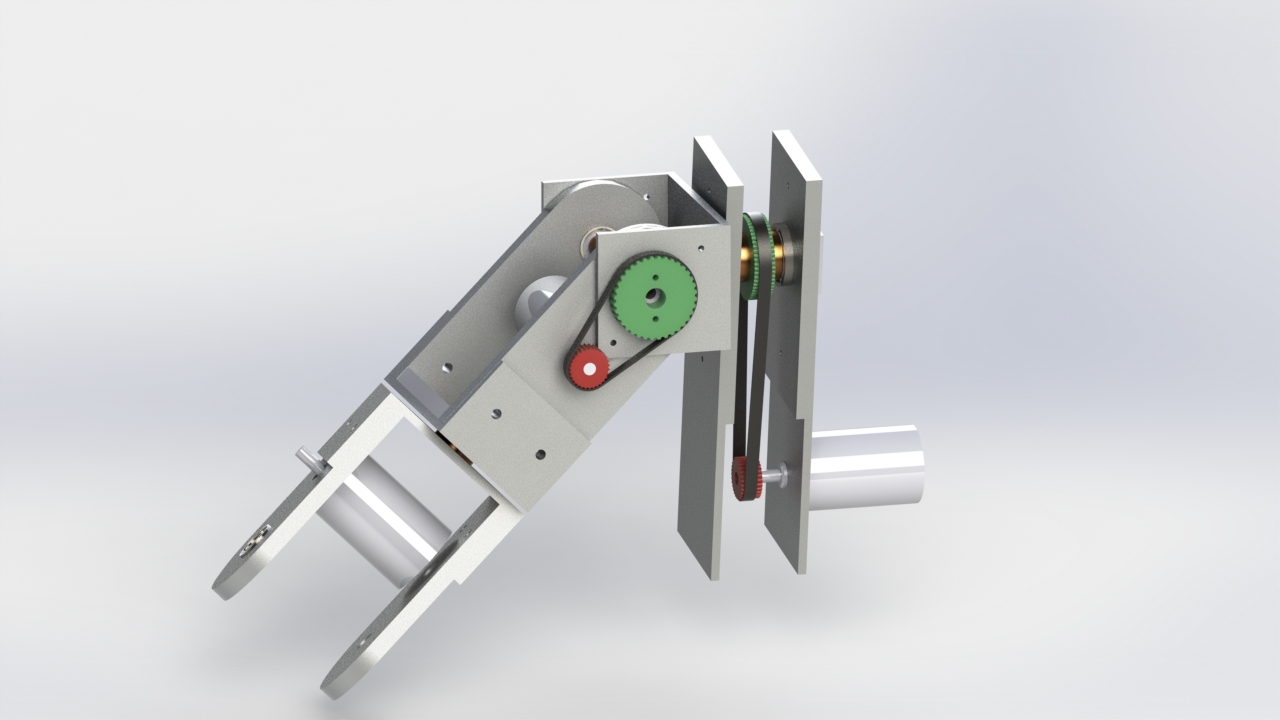
Тогда было решено приводы вынести ближе к основанию с применением тросов, хотя был соблазн и вовсе их расположить в основании. Причем на этот раз использовалась система конических шестерен для пар степеней. Такой блок шестерен позволил распределить крутящий момент сразу между двумя степенями свободы.

Работа закипела: расчеты, чертежи, размышления… Спроектировав весь манипулятор, закралось сомнение… Удастся ли нивелировать погрешность растяжения тросов и обеспечить достаточную жесткость передачи крутящего момента?

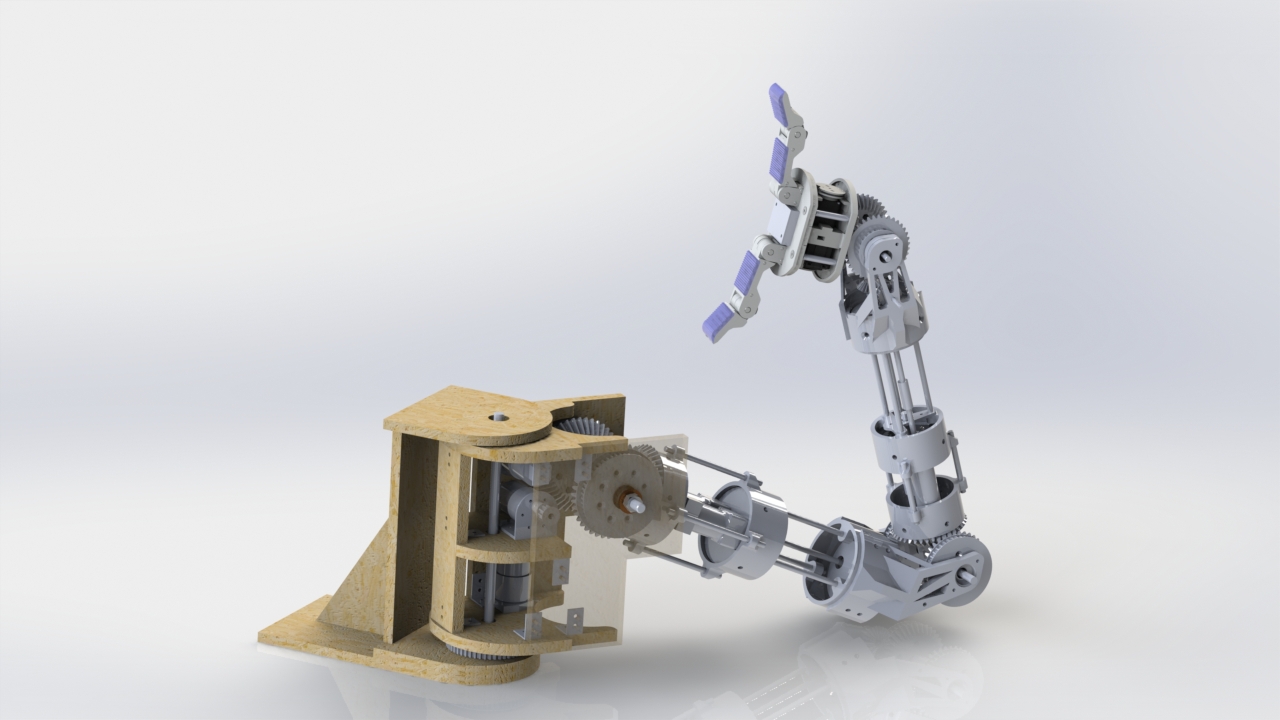
И мы приступили к следующей итерации, которая была направленна на улучшения и исправление недостатков, так как в целом получившаяся конструкция нас устраивала. В основном изменению подвергся способ передачи крутящего момента, и, в конечном итоге, мы остановились на комбинированном варианте: жесткие валы и ременная передача.

Ну и конечно же общий вид манипулятора.
В следующей статье будет затронута электронная начинка и принципиальная схема нашего детища.
