Необработанный сигнал шины CAN
Шина CAN (Controller Area Network) стала стандартом в автомобилестроении: все новые автомобили обязаны поддерживать CAN (с 2001 в Европе и с 2008 в США). Кроме автомобилей, CAN применяется и в широком ряде других устройств. Производители диагностического оборудования для CAN рекламируют его применение, кроме разнообразной автомобильной техники, в мотоциклах, автопогрузчиках, судах, шахтных поездах, батискафах, беспилотных самолетах и пр. Давайте разберемся, что из себя представляет CAN.
В автомобилях используется несколько CAN; например, в Ford Focus таких шин четыре — три высокоскоростных (500 kbps) для управления мотором, тормозами, приборной панелью и т.п., и одна низкоскоростная (125 kbps) для управления дверьми, фарами, подушками безопасности, аудиосистемой, кондиционером и всем прочим. Подключившись к CAN, можно имитировать сигналы от любых устройств в автомобиле — например, управлять кондиционером с приложения на телефоне или накручивать одометр без движения автомобиля. Подключив к шине Arduino и реле, можно управлять с приборной панели дополнительной парковочной камерой. Даже стартапы, работающие над беспилотными автомобилями, такие как Voyage, начинают создание прототипа с того, что в обычном серийном автомобиле подключаются к CAN и учатся имитировать сигналы от педалей и руля.
Для подключения к CAN в автомобиле обычно возле руля имеется разъем OBD-II (On-Board Diagnostics).

Адаптеры OBD2-USB для подключения компьютера к CAN стоят от $5, и позволяют отслеживать весь трафик внутри автомобиля. Иногда разъем OBD-II защищен «аппаратным фаерволом», позволяющим принимать пакеты от устройств, подключенных к CAN, но не позволяющим передавать пакеты обратно на шину. В этом случае достаточно вывинтить разъем, и подключиться к проводам CAN вместо него.

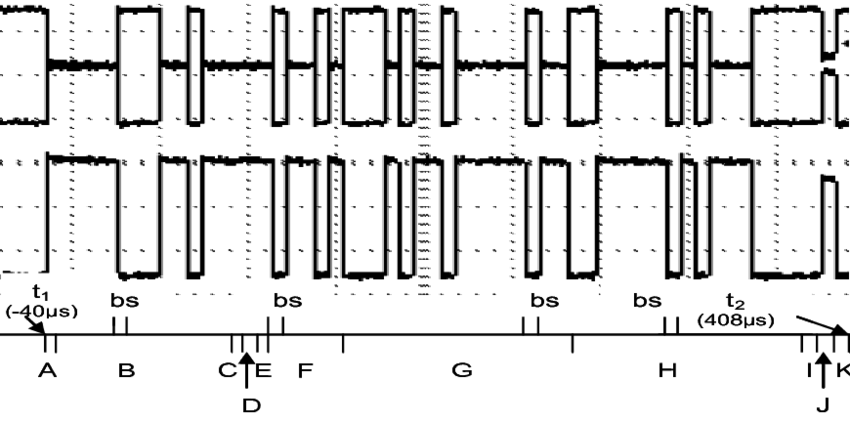
Каждый пакет, передаваемый по шине CAN, состоит из ID передающего устройства (11 либо 29 бит), и до 8 байт передаваемых данных. Трафик, проходящий по шине при включении зажигания, может выглядеть как-то так:
Для анализа трафика CAN существует большое число инструментов — как коммерческих, так и OpenSource. Пакет can-utils для Linux включает утилиту
cansniffer, которая отображает для каждого CAN ID только последний отправленный пакет, и тем самым позволяет отслеживать изменения показаний каждого датчика на шине:
Для реверс-инжиниринга трафика CAN сингапурские исследователи, из доклада которых я взял этот трейс, записали на видео приборную доску подопытного автомобиля, и затем соотнесли изменения на приборной доске с одновременными изменениями в трафике. Определив таким образом CAN ID датчика скорости и формат передаваемых им данных, они научились «подделывать» его пакеты, передавая на спидометр и на тахометр показания, не соответствующие действительности.
Надо понимать, что параллельно с передачей «поддельных» пакетов по шине продолжают передаваться и настоящие сигналы от датчика скорости. Чтобы тахометр показывал сфабрикованные показания, надо отслеживать передачу по шине настоящих показаний, и каким-либо образом их подавлять — например, сразу после обнаружения передачи CAN ID датчика скорости физически «глушить» шину, закорачивая линии данных. Более простой, чисто программный метод подавления настоящих показаний — сразу же после их передачи, пока тахометр еще не успел отреагировать, передавать «поддельные» пакеты. Например, следующий простой шелл-скрипт отслеживает передачу с CAN ID=0x0C9, и сразу же после нее передает сфабрикованный пакет при помощи утилиты
cansend из состава все тех же can-utils:candump can0 | grep " 0C9 " | while read line; do cansend can0 0C9#8021C0071B101000; done
Даже хотя все устройства в автомобиле подключены к CAN, далеко не все их функции управляются через CAN. Например, на CAN в Ford Escape передаются сигналы о степени нажатия педалей газа и тормоза — но используются эти сигналы только блоком ABS, тогда как приводы дроссельной заслонки и тормозов соединены с педалями напрямую, минуя CAN.
C точки зрения безопасности ни о какой уязвимости в докладе сингапурцев речи не идет, потому что для передачи «поддельных» CAN-пакетов нужен физический доступ к шине. Кроме того, пакеты могут быть защищены контрольной суммой — например, в автомобилях Toyota последний байт каждого пакета должен равняться сумме всех предыдущих (по модулю 256). Кроме этого, в Toyota для защиты от нежелательных пакетов используется фильтрация получателем — например, игнорируются повороты руля более чем на 5% от текущего значения.
Тем не менее исследователям безопасности удавалось получить к CAN и удаленный доступ: вначале на небольшом расстоянии — через уязвимости в Bluetooth-модуле, подключенном к той же самой шине; а затем через сотовую сеть Sprint, через которую внедорожники нескольких американских производителей получали данные о пробках на дорогах. Исследователи, продемонстрировавшие перехват управления Jeep Cherokee с расстояния в несколько миль, получили от Управления перспективных исследовательских проектов Министерства обороны США (DARPA) вознаграждение в 80 тысяч долларов. С тех пор многие автопроизводители объявили о собственных bounty-программах, обещающих выплаты от $1500 за каждую обнаруженную уязвимость. Таким образом, реверс-инжиниринг трафика на шине CAN может не только добавить вашему автомобилю новые возможности, но и существенно пополнить ваш кошелек.

