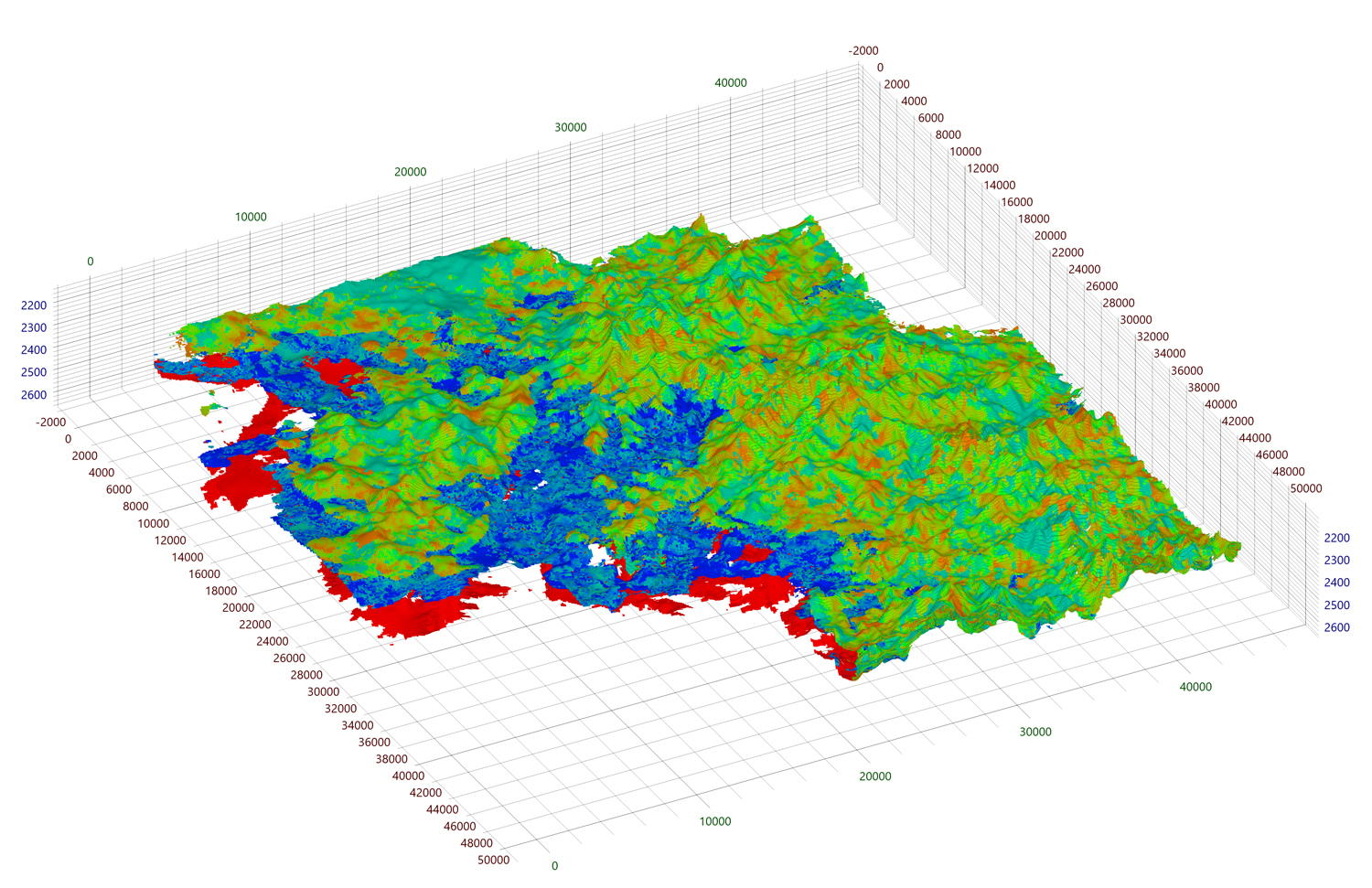
В первой части статьи мы реализовали простой (и не очень эффективный) рендерер сетки ГУТ, и пообещали, что оптимизируем рендерер настолько, что он сможет отобразить заявленный в заголовке миллиард ячеек.
Для этого нам придётся значительно сократить объём потребляемой видеопамяти — в текущем виде даже на игровых видеокартах (если бы их можно было купить в наше время!) памяти может не хватить, не говоря уж о видеокартах в офисных компьютерах.
Начнём с того, что проанализируем, сколько памяти требует наш рендерер сейчас. Каждая грань ячейки задана на четырёх вершинах, каждая вершина содержит пять атрибутов общим объёмом в 48 байт. Предположим, что на вход подаётся полностью состыкованная сетка размером 10003. В этом случае будет сгенерировано 4*6*10002 вершин для внешних граней сетки, общим объёмом 1098,6 Мб. Не будем забывать и про индексы, коих будет сгенерировано 6*6*10002 шт. размером 137,3 Мб.
В реальности, сетки ГУТ часто не полностью состыкованы и обычно имеют маску активности ячеек, из-за чего не отсечённых граней может быть гораздо больше.
Представим пару соседних ячеек, одна из которых активна, а другая – нет. Алгоритм отсечения невидимых граней (см. первую часть статьи) скажет, что для активной ячейки нужно рисовать грань со стороны неактивной ячейки. Таким образом, чем больше в сетке неактивных ячеек, тем больше граней будет создано.
Чтобы проиллюстрировать этот случай, сгенерируем тестовую сетку сравнительно небольшого размера — всего 2003 ячеек. Подвох в том, что ровно половину из ячеек случайным образом сделали неактивными — это худший случай для нашего алгоритма отсечения невидимых граней.
Может показаться, что этот пример является надуманным, но с точки зрения отсечения невидимых граней нет разницы, оставлена ли грань из-за нестыкованности или из-за неактивности соседней ячейки.
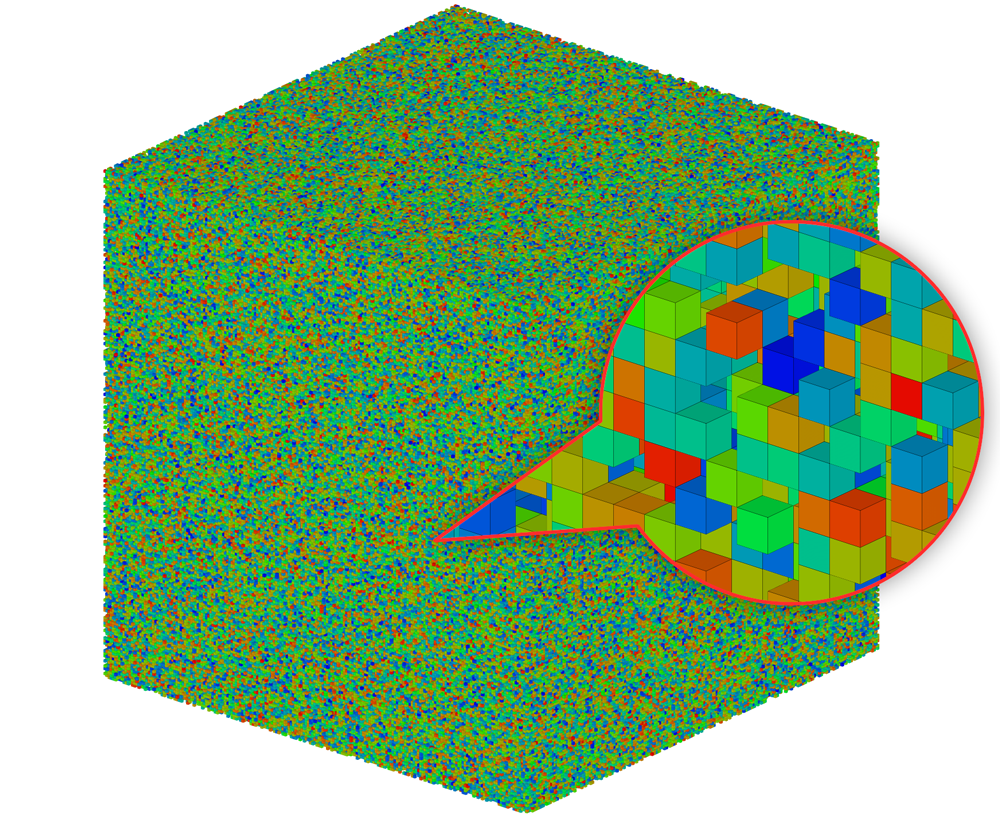
Для этой сравнительно небольшой сетки объём занимаемой памяти под вершины и индексы составил 2484,3 Мб — в два раза больше, чем для миллиарда состыкованных ячеек!
Для удобства читателя приведём исходный код рендерера из первой части статьи:
Код из первой части статьи
// corner_point_grid.h
template<typename T>
struct span3d {
T* const data;
const uint32_t ni;
const uint32_t nj;
const uint32_t nk;
span3d(T* _data, uint32_t _ni, uint32_t _nj, uint32_t _nk)
: data(_data), ni(_ni), nj(_nj), nk(_nk) { }
T at(size_t x, size_t y, size_t z) const {
return data[x * nj * nk + y * nk + z];
}
T& at(size_t x, size_t y, size_t z) {
return data[x * nj * nk + y * nk + z];
}
};
struct Palette {
float min_value;
float max_value;
GLuint texture;
};
struct CornerPointGrid
{
CornerPointGrid(uint32_t ni, uint32_t nj, uint32_t nk,
const float* coord, const float *zcorn, const float* property, const uint8_t* mask);
~CornerPointGrid();
void render(GLuint shader,
const Palette& palette,
const mat4& proj, const mat4 & view,
const mat4& model,
vec3 light_direct,
bool primitive_picking);
private:
// входные данные
span3d<const float> _coord;
span3d<const float> _zcorn;
span3d<const float> _property;
span3d<const uint8_t> _mask;
// маска состыкованности граней
std::vector<uint8_t> _joined_mask_data;
span3d<uint8_t> _joined_mask; // ссылается на массив _joined_mask_data;
// объекты OpenGL
GLuint _position_vbo;
GLuint _normal_vbo;
GLuint _cell_index_vbo;
GLuint _texcoord_vbo;
GLuint _property_vbo;
GLuint _indexbuffer;
GLuint _vao;
// число треугольников для рендеринга
size_t _triangle_count;
// расчет вершин и индексов
void _gen_vertices_and_indices(size_t quad_count);
// создание буферов OpenGL
void _create_vertex_index_buffers();
// назначение буферов в VAO
void _setup_vao();
};
// corner_point_grid.cpp
// Для каждой ячейки нужно получить координаты восьми её вершин.
// 6-------7
// /| / |
// 4------5 | z y
// | 2----|--3 |/
// |/ | / 0-x
// 0------1
// Эти массивы определяют отступы для получения каждой из 8-ми вершин
// ячейки по осям x, y, z, если рассматривать только одну ячейку.
static const std::array<uint32_t, 8> cell_vertices_offset_x = {
0, 1, 0, 1, 0, 1, 0, 1
};
static const std::array<uint32_t, 8> cell_vertices_offset_y = {
0, 0, 1, 1, 0, 0, 1, 1
};
static const std::array<uint32_t, 8> cell_vertices_offset_z = {
0, 0, 0, 0, 1, 1, 1, 1
};
// Индексы вершин, формирующие грани ячейки.
// 6-------7
// /| / |
// 4------5 | z y
// | 2----|--3 |/
// |/ | / 0-x
// 0------1
static const std::array<std::array<uint32_t, 4>, 6> cell_quads = {
std::array<uint32_t, 4>{0, 1, 5, 4}, // 1-ая грань
std::array<uint32_t, 4>{1, 3, 7, 5}, // 2-ая грань
std::array<uint32_t, 4>{3, 2, 6, 7}, // ...
std::array<uint32_t, 4>{2, 0, 4, 6},
std::array<uint32_t, 4>{3, 1, 0, 2},
std::array<uint32_t, 4>{4, 5, 7, 6},
};
// Для каждой грани индексы соседней ячейки со стороны этой грани
static const std::array<std::array<int, 3>, 6> cell_quads_neighbors = {
// прибавим их к координатам (i,j,k) ячейки - получим координаты соседней ячейки
std::array<int, 3>{ 0, -1, 0},
std::array<int, 3>{ 1, 0, 0},
std::array<int, 3>{ 0, 1, 0},
std::array<int, 3>{-1, 0, 0},
std::array<int, 3>{ 0, 0, -1},
std::array<int, 3>{ 0, 0, 1},
};
// битовые маски, с помощью которой можно узнать стыкована ли ячейка с одной из соседних
// (просмотрев соответствующий маске бит в массиве joined_mask)
enum JoinedMaskBits : uint8_t {
I_PREV = 1 << 0, I_NEXT = 1 << 1,
J_PREV = 1 << 2, J_NEXT = 1 << 3,
K_PREV = 1 << 4, K_NEXT = 1 << 5
};
// Для каждой грани бит, показывающий стыкованность с соседней ячейкой
static const std::array<JoinedMaskBits, 6> cell_quads_joined_mask_bits = {
// то есть ячейка является соседней по оси x, y или z
JoinedMaskBits::J_PREV,
JoinedMaskBits::I_NEXT,
JoinedMaskBits::J_NEXT,
JoinedMaskBits::I_PREV,
JoinedMaskBits::K_PREV,
JoinedMaskBits::K_NEXT,
};
// Для того, чтобы рисовать сетку на границах ячеек,
// надо знать насколько близко расположен пиксель к границе.
// Тут перечислены текстурные координаты для каждой вершины грани,
// которые позволят получить расстояние до границы
// (если один из компонентов равен нулю, то это и есть граница).
static const std::array<vec2, 4> quad_vertices_texcoords = {
vec2(1, 0),
vec2(0, 0),
vec2(0, 1),
vec2(0, 0),
};
// Как для грани сформировать два треугольника
static const std::array<uint32_t, 6> quad_to_triangles = {
0, 1, 2, 0, 2, 3
};
static vec3 calc_normal(vec3 v1, vec3 v2){
// посчитаем нормаль к кваду
vec3 normal = cross(v1, v2);
// приведем нормаль к единичной длине
if (length2(normal) < 1e-8f){
normal = vec3(0, 0, 1);
} else {
normal = normalize(normal);
}
return normal;
}
static void calc_joined_mask(span3d<const float> zcorn, span3d<uint8_t> joined_mask) {
// с какой точностью сравниваем совпадание граней, ~10 см вполне достаточно.
const float eps = 0.1f;
// для каждой ячейки результирующей маски
for(uint32_t i = 0; i < joined_mask.ni; ++i) {
for(uint32_t j = 0; j < joined_mask.nj; ++j) {
for(uint32_t k = 0; k < joined_mask.nk; ++k) {
// индексы этой ячейки в zcorn
uint32_t iz = i * 2, jz = j * 2, kz = k * 2;
// проверяем, совпадают ли граничные вершины ячеек (i,j,k) и (i+1,j,k) по оси X
if (i + 1 < joined_mask.ni) {
float d = 0.0f;
d += std::abs(zcorn.at(iz+1, jz, kz ) - zcorn.at(iz+2, jz, kz ));
d += std::abs(zcorn.at(iz+1, jz+1, kz ) - zcorn.at(iz+2, jz+1, kz ));
d += std::abs(zcorn.at(iz+1, jz, kz+1) - zcorn.at(iz+2, jz, kz+1));
d += std::abs(zcorn.at(iz+1, jz+1, kz+1) - zcorn.at(iz+2, jz+1, kz+1));
if (d < eps) {
// совпадают - отметим стыкованность, установив биты I_NEXT и I_PREV
joined_mask.at(i, j, k) |= I_NEXT;
joined_mask.at(i+1, j, k) |= I_PREV;
}
}
// проверяем, совпадают ли граничные вершины ячеек (i,j,k) и (i,j+1,k) по оси Y
if (j + 1 < joined_mask.nj) {
float d = 0.0f;
d += std::abs(zcorn.at(iz, jz+1, kz ) - zcorn.at(iz, jz+2, kz ));
d += std::abs(zcorn.at(iz+1, jz+1, kz ) - zcorn.at(iz+1, jz+2, kz ));
d += std::abs(zcorn.at(iz, jz+1, kz+1) - zcorn.at(iz, jz+2, kz+1));
d += std::abs(zcorn.at(iz+1, jz+1, kz+1) - zcorn.at(iz+1, jz+2, kz+1));
if (d < eps) {
// совпадают - отметим стыкованность, установив биты J_NEXT и J_PREV
joined_mask.at(i, j, k) |= J_NEXT;
joined_mask.at(i, j+1, k) |= J_PREV;
}
}
// проверяем, совпадают ли граничные вершины ячеек (i,j,k) и (i,j,k+1) по оси Z
if (k + 1 < joined_mask.nk) {
float d = 0.0f;
d += std::abs(zcorn.at(iz, jz, kz+1) - zcorn.at(iz, jz, kz+2));
d += std::abs(zcorn.at(iz+1, jz, kz+1) - zcorn.at(iz+1, jz, kz+2));
d += std::abs(zcorn.at(iz, jz+1, kz+1) - zcorn.at(iz, jz+1, kz+2));
d += std::abs(zcorn.at(iz+1, jz+1, kz+1) - zcorn.at(iz+1, jz+1, kz+2));
if (d < eps) {
// совпадают - отметим стыкованность, установив биты K_NEXT и K_PREV
joined_mask.at(i, j, k) |= K_NEXT;
joined_mask.at(i, j, k+1) |= K_PREV;
}
}
} // for k
} // for j
} // for i
}
static bool check_if_quad_culled(const span3d<const uint8_t>& mask,
const span3d<uint8_t>& joined_mask,
uint32_t i, uint32_t j, uint32_t k, uint32_t qi) {
// грани создавать нужно только для тех сторон, которые не состыкованы с соседними
if (!(joined_mask.at(i, j, k) & cell_quads_joined_mask_bits[qi]))
return false;
// или если соседняя ячейка не отображается
// (выход за границы не проверяем, т.к. по границе _joined_mask == 0)
if (!mask.at(i + cell_quads_neighbors[qi][0],
j + cell_quads_neighbors[qi][1],
k + cell_quads_neighbors[qi][2]))
return false;
// обе проверки не прошли, значит грань можно отсечь
return true;
}
static size_t calc_number_of_quads(const span3d<const uint8_t>& mask,
const span3d<uint8_t> joined_mask) {
size_t num_of_quads = 0;
for (uint32_t i = 0; i < mask.ni; ++i)
for (uint32_t j = 0; j < mask.nj; ++j)
for (uint32_t k = 0; k < mask.nk; ++k)
// если ячейка активна
if (mask.at(i, j, k)){
// для каждого возможного полигона
for (uint32_t qi = 0; qi < 6; ++qi){
// определим, нужно ли его создавать
if (!check_if_quad_culled(mask, joined_mask, i, j, k, qi))
// и если нужно, то увеличим счетчик
num_of_quads++;
}
}
return num_of_quads;
}
// Получаем все 8 вершин, соответствующих ячейке (i, j, k).
// 6-------7
// /| / |
// 4------5 |
// | 2----|--3
// |/ | /
// 0------1
static void get_cell_vertices(const span3d<const float>& coord,
const span3d<const float>& zcorn,
uint32_t i, uint32_t j, uint32_t k,
std::array<vec3, 8>& vertices)
{
// для каждой вершины
for (int vi = 0; vi < 8; ++vi) {
// получим индексы пиллара по индексам ячейки
uint32_t pillar_index_i = i + cell_vertices_offset_x[vi];
uint32_t pillar_index_j = j + cell_vertices_offset_y[vi];
// p1 - первая точка пиллара
float p1_x = coord.at(pillar_index_i, pillar_index_j, 0);
float p1_y = coord.at(pillar_index_i, pillar_index_j, 1);
float p1_z = coord.at(pillar_index_i, pillar_index_j, 2);
// p2 - вторая точка пиллара
float p2_x = coord.at(pillar_index_i, pillar_index_j, 3);
float p2_y = coord.at(pillar_index_i, pillar_index_j, 4);
float p2_z = coord.at(pillar_index_i, pillar_index_j, 5);
// значение Z для ячейки у нас есть, а X и Y нет,
// зато известно, что (x,y,z) лежит на линии пиллара p1-p2
float z = zcorn.at(2 * i + cell_vertices_offset_x[vi],
2 * j + cell_vertices_offset_y[vi],
2 * k + cell_vertices_offset_z[vi]);
float t = (z - p1_z) / (p2_z - p1_z);
float x = p1_x + (p2_x - p1_x) * t;
float y = p1_y + (p2_y - p1_y) * t;
vertices[vi].x = x;
vertices[vi].y = y;
vertices[vi].z = z;
}
}
void CornerPointGrid::_gen_vertices_and_indices(size_t quad_count) {
const size_t vertex_count = quad_count * 4;
std::vector<float> a_position, a_index, a_property, a_normal, a_texcoord;
// для каждой вершины 3 координаты (x, y и z)
a_position.reserve(3 * vertex_count);
// + три индекса
a_index.reserve(3 * vertex_count);
// + значение свойства ячейки
a_property.reserve(vertex_count);
// + три компоненты нормали
a_normal.reserve(3 * vertex_count);
// + две текстурные координаты (расстояние от вершин до противолежащих сторон)
a_texcoord.reserve(2 * vertex_count);
// буфер, куда записываются вершины ячейки
std::array<vec3, 8> cell_vertices;
// для каждой рассматриваемой ячейки
for (uint32_t i = 0; i < _property.ni; ++i) {
for (uint32_t j = 0; j < _property.nj; ++j) {
for (uint32_t k = 0; k < _property.nk; ++k) {
// если ячейка может отрисовываться (они фильтруются по маске)
if (_mask.at(i, j, k)){
// рассчитаем 8 вершин, соответствующих ячейке
get_cell_vertices(_coord, _zcorn, i, j, k, cell_vertices);
// из вершин формируем грани
for (int qi = 0; qi < 6; ++qi) {
// определим, нужно ли создавать грань
if (!check_if_quad_culled(_mask, _joined_mask, i, j, k, qi)){
// 4 индекса вершин грани
const std::array<uint32_t, 4>& quad = cell_quads[qi];
// посчитаем нормаль грани
vec3 normal = calc_normal(
cell_vertices[quad[0]] - cell_vertices[quad[1]],
cell_vertices[quad[2]] - cell_vertices[quad[1]]);
// для каждой вершины в полигоне
for (int vii = 0; vii < 4; ++vii){
// координаты очередной вершины
const vec3& v = cell_vertices[quad[vii]];
// записываем атрибуты вершины
a_position.insert(a_position.end(), {v.x, v.y, v.z});
a_index.insert(a_index.end(), {(float)i, (float)j, (float)k});
a_property.push_back(_property.at(i, j, k));
a_normal.insert(a_normal.end(), {normal.x, normal.y, normal.z});
vec2 texcoords = quad_vertices_texcoords[vii];
a_texcoord.insert(a_texcoord.end(), {texcoords.x, texcoords.y});
}
}
}
}
}
}
}
assert(a_position.size() == vertex_count * 3);
// загружаем атрибуты в VBO
glNamedBufferStorage(_position_vbo, a_position.size() * sizeof (float), a_position.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_normal_vbo, a_normal.size() * sizeof (float), a_normal.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_cell_index_vbo, a_index.size() * sizeof (float), a_index.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_texcoord_vbo, a_texcoord.size() * sizeof (float), a_texcoord.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_property_vbo, a_property.size() * sizeof (float), a_property.data(), gl::GL_NONE_BIT);
// создадим массив индексов - на каждую грань два треугольника
size_t indices_count = quad_count * 6;
std::vector<uint32_t> indices;
indices.reserve(indices_count);
for (size_t i = 0; i < quad_count; ++i)
for (uint32_t j = 0; j < 6; ++j)
// индекс очередной вершины при составлении треугольников
indices.push_back(static_cast<uint32_t>(i * 4 + quad_to_triangles[j]));
glNamedBufferStorage(_indexbuffer, indices.size() * sizeof (uint32_t), indices.data(), gl::GL_NONE_BIT);
// запомним число индексов, нужно для glDrawElements
_triangle_count = indices.size();
}
void CornerPointGrid::_create_vertex_index_buffers() {
// вершинные буферы
glCreateBuffers(1, &_position_vbo);
glCreateBuffers(1, &_normal_vbo);
glCreateBuffers(1, &_cell_index_vbo);
glCreateBuffers(1, &_texcoord_vbo);
glCreateBuffers(1, &_property_vbo);
// индексный буфер
glCreateBuffers(1, &_indexbuffer);
}
void CornerPointGrid::_setup_vao() {
// создаем VAO
glCreateVertexArrays(1, &_vao);
// назначаем индексный буфер в VAO
glVertexArrayElementBuffer(_vao, _indexbuffer);
// назначаем все атрибуты в VAO
// position
glVertexArrayVertexBuffer(_vao, 0, _position_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 0, 0);
glVertexArrayAttribFormat(_vao, 0, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 0);
// normal
glVertexArrayVertexBuffer(_vao, 1, _normal_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 1, 1);
glVertexArrayAttribFormat(_vao, 1, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 1);
// cell index
glVertexArrayVertexBuffer(_vao, 2, _cell_index_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 2, 2);
glVertexArrayAttribFormat(_vao, 2, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 2);
// texcoord
glVertexArrayVertexBuffer(_vao, 3, _texcoord_vbo, 0, sizeof (float) * 2);
glVertexArrayAttribBinding(_vao, 3, 3);
glVertexArrayAttribFormat(_vao, 3, 2, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 3);
// property
glVertexArrayVertexBuffer(_vao, 4, _property_vbo, 0, sizeof (float));
glVertexArrayAttribBinding(_vao, 4, 4);
glVertexArrayAttribFormat(_vao, 4, 1, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 4);
}
CornerPointGrid::CornerPointGrid(uint32_t ni, uint32_t nj, uint32_t nk,
const float* coord, const float* zcorn, const float* property, const uint8_t* mask) :
_coord(coord, ni+1, nj+1, 6),
_zcorn(zcorn, ni*2, nj*2, nk*2),
_property(property, ni, nj, nk),
_mask(mask, ni, nj, nk),
_joined_mask_data(ni*nj*nk, 0),
_joined_mask(_joined_mask_data.data(), ni, nj, nk) {
// посчитаем маску стыкованности ячеек
calc_joined_mask(_zcorn, _joined_mask);
// рассчитаем число видимых граней
size_t quad_count = calc_number_of_quads(_mask, _joined_mask);
// создаем вершинные и индексный буферы
_create_vertex_index_buffers();
// рассчитаем вершины и индексы и загрузим их в вершинные/индексные буферы
_gen_vertices_and_indices(quad_count);
// назначаем наши вершинные и индексный буфер в VAO
_setup_vao();
}
CornerPointGrid::~CornerPointGrid()
{
glDeleteVertexArrays(1, &_vao);
glDeleteBuffers(1, &_position_vbo);
glDeleteBuffers(1, &_normal_vbo);
glDeleteBuffers(1, &_cell_index_vbo);
glDeleteBuffers(1, &_texcoord_vbo);
glDeleteBuffers(1, &_property_vbo);
glDeleteBuffers(1, &_indexbuffer);
}
void CornerPointGrid::render(GLuint shader,
const Palette& palette,
const mat4& proj,
const mat4& view,
const mat4& model,
vec3 light_direct,
bool primitive_picking)
{
// подразумеваем, что вызывающий код настроил фреймбуфер,
// включил тест и запись глубины, включил backface culling
glUseProgram(shader);
// матрица MVP
mat4 mvp = proj * view * model;
glProgramUniformMatrix4fv(shader, glGetUniformLocation(shader, "u_mvp"), 1, GL_FALSE, &mvp[0][0]);
// матрица поворота нормалей
mat3 normal_mat = transpose(inverse(mat3{model}));
glProgramUniformMatrix3fv(shader, glGetUniformLocation(shader, "u_normal_mat"), 1, GL_FALSE, &normal_mat[0][0]);
// направление света и режим пикинга
glProgramUniform3fv(shader, glGetUniformLocation(shader, "u_light_direct"), 1, &light_direct[0]);
glProgramUniform1i(shader, glGetUniformLocation(shader, "u_primitive_picking"), primitive_picking);
// палитра
glBindTextureUnit(0, palette.texture);
glProgramUniform2f(shader, glGetUniformLocation(shader, "u_value_range"), palette.min_value, palette.max_value);
// рисуем
glBindVertexArray(_vao);
glDrawElements(GL_TRIANGLES, _triangle_count, GL_UNSIGNED_INT, nullptr);
// сбрасываем все состояние на дефолтное
glBindVertexArray(0);
glBindTextureUnit(0, 0);
glUseProgram(0);
}
// corner_point_grid.vert
#version 440
// позиция
layout(location=0) in vec3 a_pos;
// нормаль
layout(location=1) in vec3 a_normal;
// индекс ячейки
layout(location=2) in vec3 a_ind;
// текстурные координаты
layout(location=3) in vec2 a_texcoord;
// значение в ячейке, по которому можно получить цвет
layout(location=4) in float a_property;
// текстура с палитрой
layout(binding=0) uniform sampler1D u_palette_tex;
// матрицы MVP-преобразования
layout(location=0) uniform mat4 u_mvp;
// матрица поворота нормалей
layout(location=1) uniform mat3 u_normal_mat;
// какому диапазону значений соответствует текстура
layout(location=2) uniform vec2 u_value_range;
// режим отрисовки
layout(location=3) uniform bool u_primitive_picking;
// вектор направления света
layout(location=4) uniform vec3 u_light_direct;
layout(location=0) out INTERFACE {
// цвет вершины
vec4 color;
// текстурные координаты
vec2 texcoord;
} vs_out;
void main() {
// проводим mvp-преобразования позиции
gl_Position = u_mvp * vec4(a_pos, 1);
// передаем текстурные координаты в фрагментный шейдер
vs_out.texcoord = a_texcoord;
// если делаем пикинг индексов ячеек, вместо цвета передаем во фрагментный шейдер индексы ячейки
if (u_primitive_picking) {
vs_out.color = vec4(a_ind.x, a_ind.y, a_ind.z, 1);
return;
}
// приводим значение свойства ячейки к диапазону палитры
float normalized_value = (a_property - u_value_range.x) / (u_value_range.y - u_value_range.x);
// получим цвет в текстуре палитры
vec4 cell_color = texture(u_palette_tex, normalized_value);
// рассчитываем повернутую нормаль
vec3 normal = normalize(u_normal_mat * a_normal);
// косинус угла между нормалью и направлением освещения
float NdotL = max(0, dot(normal, u_light_direct));
// закраска по фонгу
const float ka = 0.1, kd = 0.7;
vs_out.color = vec4((ka + NdotL * kd) * cell_color.rgb, cell_color.a);
}
// corner_point_grid.frag
#version 440
// режим отрисовки
layout(location=3) uniform bool u_primitive_picking;
layout(location = 0) in INTERFACE {
vec4 color;
vec2 texcoord;
} fs_in;
layout(location=0) out vec4 FragColor;
// цвет фрагмента с учетом необходимости рисовать границы ячеек
vec3 border_color(vec2 dist, vec3 color)
{
// на сколько изменяется dist (1 - вершина, 0 - противоположная граница)
// при сдвиге на один пиксель в cторону границы
vec2 delta = fwidth(dist);
// высота тругольника, проведенная к рассматриваемой границе
vec2 len = 1.0 / delta;
// расстояние до границы меньше пикселя - только тогда надо рисовать границу,
vec2 edge_factor = smoothstep(0.2, 0.8, len * dist);
// смешиваем цвет с сеткой
return mix(color * 0.25, color, min(edge_factor.x, edge_factor.y));
}
void main()
{
if (u_primitive_picking) {
FragColor = fs_in.color;
return;
}
// добавляем сетку
vec3 res_color = border_color(fs_in.texcoord, fs_in.color.rgb);
FragColor = vec4(res_color, fs_in.color.a);
}Избавляемся от ненужных атрибутов
Посмотрим ещё раз на список атрибутов вершин:
1. координаты вершины (3*4 байт);
2. нормаль грани (3*4 байт);
3. индексы ячейки (3*4 байт);
4. текстурные координаты (2*4 байт);
5. значение свойства в ячейке (4 байта).
В первой части мы упоминали, что «красивость» стоит далеко не на первом месте в списке требований к рендереру. Поэтому обратим внимание на атрибут нормали граней. Нам совсем необязательно, чтобы нормаль была гладкой по всей грани — можно вычислять «плоскую» нормаль в шейдере, а от атрибута нормали избавиться, сэкономив 12 байт на каждую вершину.
Сначала удалим все упоминания нормалей из функции генерации вершин:
void CornerPointGrid::_gen_vertices_and_indices(size_t quad_count) {
const size_t vertex_count = quad_count * 4;
// УДАЛЕНО // std::vector<float> a_position, a_index, a_property, a_normal, a_texcoord;
std::vector<float> a_position, a_index, a_property, a_texcoord;
// для каждой вершины 3 координаты (x, y и z)
a_position.reserve(3 * vertex_count);
// + три индекса
a_index.reserve(3 * vertex_count);
// + значение свойства ячейки
a_property.reserve(vertex_count);
// УДАЛЕНО // + три компоненты нормали
// УДАЛЕНО // a_normal.reserve(3 * vertex_count);
// + две текстурные координаты (расстояние от вершин до противолежащих сторон)
a_texcoord.reserve(2 * vertex_count);
// …
// определим, нужно ли создавать грань
if (!check_if_quad_culled(_mask, _joined_mask, i, j, k, qi)){
// 4 индекса вершин грани
const std::array<uint32_t, 4>& quad = cell_quads[qi];
// посчитаем нормаль грани
// УДАЛЕНО // vec3 normal = calc_normal(
// УДАЛЕНО // cell_vertices[quad[0]] - cell_vertices[quad[1]],
// УДАЛЕНО // cell_vertices[quad[2]] - cell_vertices[quad[1]]);
// для каждой вершины в полигоне
for (int vii = 0; vii < 4; ++vii){
// координаты очередной вершины
const vec3& v = cell_vertices[quad[vii]];
// записываем атрибуты вершины
a_position.insert(a_position.end(), {v.x, v.y, v.z});
a_index.insert(a_index.end(), {(float)i, (float)j, (float)k});
a_property.push_back(_property.at(i, j, k));
// УДАЛЕНО // a_normal.insert(a_normal.end(), {normal.x, normal.y, normal.z});
vec2 texcoords = quad_vertices_texcoords[vii];
a_texcoord.insert(a_texcoord.end(), {texcoords.x, texcoords.y});
}
// …
// загружаем атрибуты в VBO
glNamedBufferStorage(_position_vbo, a_position.size() * sizeof (float), a_position.data(), gl::GL_NONE_BIT);
// УДАЛЕНО // glNamedBufferStorage(_normal_vbo, a_normal.size() * sizeof (float), a_normal.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_cell_index_vbo, a_index.size() * sizeof (float), a_index.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_texcoord_vbo, a_texcoord.size() * sizeof (float), a_texcoord.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_property_vbo, a_property.size() * sizeof (float), a_property.data(), gl::GL_NONE_BIT);Затем избавимся от атрибута (придется сдвинуть номера последующих атрибутов):
void CornerPointGrid::_setup_vao() {
// создаем VAO
glCreateVertexArrays(1, &_vao);
// назначаем индексный буфер в VAO
glVertexArrayElementBuffer(_vao, _indexbuffer);
// назначаем все атрибуты в VAO
// position
glVertexArrayVertexBuffer(_vao, 0, _position_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 0, 0);
glVertexArrayAttribFormat(_vao, 0, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 0);
// normal
// УДАЛЕНО // glVertexArrayVertexBuffer(_vao, 1, _normal_vbo, 0, sizeof (float) * 3);
// УДАЛЕНО // glVertexArrayAttribBinding(_vao, 1, 1);
// УДАЛЕНО // glVertexArrayAttribFormat(_vao, 1, 3, GL_FLOAT, GL_FALSE, 0);
// УДАЛЕНО // glEnableVertexArrayAttrib(_vao, 1);
// cell index
glVertexArrayVertexBuffer(_vao, 1, _cell_index_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 1, 1);
glVertexArrayAttribFormat(_vao, 1, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 1);
// texcoord
glVertexArrayVertexBuffer(_vao, 2, _texcoord_vbo, 0, sizeof (float) * 2);
glVertexArrayAttribBinding(_vao, 2, 2);
glVertexArrayAttribFormat(_vao, 2, 2, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 2);
// property
glVertexArrayVertexBuffer(_vao, 3, _property_vbo, 0, sizeof (float));
glVertexArrayAttribBinding(_vao, 3, 3);
glVertexArrayAttribFormat(_vao, 3, 1, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 3);
//...И, наконец, модифицируем шейдеры. В вершинном шейдере рассчитаем модельные координаты вершины и передадим их во фрагментный шейдер:
// …
// матрицы MVP-преобразования
layout(location=0) uniform mat4 u_mvp;
// матрица модели (для расчета нормали)
layout(location=1) uniform mat4 u_model;
// …
layout(location=0) out INTERFACE {
// цвет вершины
vec4 color;
// координаты ячейки в пространстве модели (для вычисления нормали)
vec3 model_pos;
// текстурные координаты
vec2 texcoord;
} vs_out;
void main() {
// проводим mvp-преобразования позиции
vec4 pos = vec4(a_pos, 1);
gl_Position = u_mvp * pos;
// если делаем пикинг индексов ячеек, вместо цвета передаем во фрагментный шейдер индексы ячейки
if (u_primitive_picking) {
vs_out.color = vec4(a_ind.x, a_ind.y, a_ind.z, 1);
return;
}
// передаем координаты ячейки (для вычисления нормали)
vs_out.model_pos = vec3(u_model * pos);
// …
}Во фрагментном шейдере возьмём интерполированные при растеризации модельные координаты, получим их экранные производные и посчитаем нормаль как векторное произведение:
// …
layout(location = 0) in INTERFACE {
vec4 cell_color;
vec3 model_pos;
vec2 texcoord;
} fs_in;
// …
void main()
{
if (u_primitive_picking) {
FragColor = fs_in.cell_color;
return;
}
vec3 normal = normalize(cross(dFdy(fs_in.model_pos), dFdx(fs_in.model_pos)));
// …
}Если мы сделали всё правильно, мы не увидим особой разницы на простой сетке. Но на сетках с непланарными гранями разница станет очевидной:

На реальных сетках месторождений разница не настолько заметна, поскольку обычно грани ячеек более-менее планарны.
Что же с потреблением памяти?
Память под атрибуты | FPS в лучшем случае | FPS в худшем случае | |
До оптимизаций | 2 484,29 Мб | 54,3 | 17,7 |
Без нормалей | 1 932,23 Мб | 60,8 | 18,4 |
Таблица 1 Сравнение потребления памяти и производительности на тестовой сетке размером 2003 c 50% активных ячеек на видеокарте AMD RX580 8GB
Как видим, объём потребляемой памяти предсказуемо уменьшился, а частота кадров немного увеличилась даже несмотря на то, что освещение теперь вычисляется во фрагментном шейдере.
После удаления атрибута нормалей список атрибутов выглядит следующим образом:
координаты вершины (3*4 байт);
индексы ячейки (3*4 байт);
текстурные координаты (2*4 байт);
значение свойства в ячейке (4 байта).
Обратим внимание на атрибут текстурных координат. Каждая компонента вектора текстурных координат принимает одно из двух значений: 0 или 1. Использовать целых восемь байт ради двух бит — расточительно, так что этот атрибут следующий в списке на расстрел оптимизацию.
Куда же запаковать эти два бита? Наилучшим кандидатом является атрибут индексов ячейки: индексы всегда положительны — так что мы можем записать по одному биту текстурной координаты в их знаки без потери информации.
Как и в случае с нормалями, сначала удалим из метода генерации вершин и шейдера все упоминания атрибута текстурных координат:
// …
// УДАЛЕНО // std::vector<float> a_position, a_index, a_property, a_texcoord;
std::vector<float> a_position, a_index, a_property;
// для каждой вершины 3 координаты (x, y и z)
a_position.reserve(3 * vertex_count);
// + три индекса
a_index.reserve(3 * vertex_count);
// + значение свойства ячейки
a_property.reserve(vertex_count);
// УДАЛЕНО // + две текстурные координаты (расстояние от вершин до противолежащих сторон)
// УДАЛЕНО // a_texcoord.reserve(2 * vertex_count);
// …
// загружаем атрибуты в VBO
glNamedBufferStorage(_position_vbo, a_position.size() * sizeof (float), a_position.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_cell_index_vbo, a_index.size() * sizeof (float), a_index.data(), gl::GL_NONE_BIT);
// УДАЛЕНО //glNamedBufferStorage(_texcoord_vbo, a_texcoord.size() * sizeof (float), a_texcoord.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_property_vbo, a_property.size() * sizeof (float), a_property.data(), gl::GL_NONE_BIT);
// …
// cell index
glVertexArrayVertexBuffer(_vao, 1, _cell_index_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 1, 1);
glVertexArrayAttribFormat(_vao, 1, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 1);
// texcoord
// УДАЛЕНО //glVertexArrayVertexBuffer(_vao, 2, _texcoord_vbo, 0, sizeof (float) * 2);
// УДАЛЕНО //glVertexArrayAttribBinding(_vao, 2, 2);
// УДАЛЕНО //glVertexArrayAttribFormat(_vao, 2, 2, GL_FLOAT, GL_FALSE, 0);
// УДАЛЕНО //glEnableVertexArrayAttrib(_vao, 2);
// property
glVertexArrayVertexBuffer(_vao, 2, _property_vbo, 0, sizeof (float));
glVertexArrayAttribBinding(_vao, 2, 2);
glVertexArrayAttribFormat(_vao, 2, 1, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 2);Затем модифицируем массивы с описанием значений текстурных координат — там, где был 0, запишем -1:
// Для того, чтобы рисовать сетку на границах ячеек,
// надо знать насколько близко расположен пиксель к границе.
// Тут перечислены текстурные координаты для каждой вершины грани,
// которые позволят получить расстояние до границы
// (если один из компонентов равен нулю, то это и есть граница).
static const std::array<vec2, 4> quad_vertices_texcoords = {
vec2( 1, -1),
vec2(-1, -1),
vec2(-1, 1),
vec2(-1, -1),
};И умножим первые две компоненты индекса ячейки на текстурные координаты — так записывается знак:
// …
// записываем атрибуты вершины
a_position.insert(a_position.end(), {v.x, v.y, v.z});
// запишем текстурные координаты в знаки индексов ячейки.
a_index.insert(a_index.end(), { i * texcoords[0],
j * texcoords[1],
k });
// …После этого в вершинном шейдере восстановим значения индексов, просто взяв модуль, а текстурные координаты восстановим с помощью функции sign():
// …
// если делаем пикинг индексов ячеек, вместо цвета передаем во фрагментный шейдер индексы ячейки
if (u_primitive_picking) {
vs_out.color = vec4(abs(a_ind.x), abs(a_ind.y), a_ind.z, 1);
return;
}
// передаем координаты ячейки (для вычисления нормали)
vs_out.model_pos = vec3(u_model * pos);
// передаем текстурные координаты в фрагментный шейдер
vs_out.texcoord = vec2(max(vec2(0), sign(a_ind.xy)));Запускаем и замеряем потребление памяти и производительность:
Память под атрибуты | FPS в лучшем случае | FPS в худшем случае | |
До оптимизаций | 2 484,29 Мб | 54,3 | 17,7 |
Без нормалей | 1 932,23 Мб | 60,8 | 18,4 |
Без текстурных координат | 1 564,18 Мб | 65,8 | 19,0 |
Таблица 2 Сравнение потребления памяти и производительности на видеокарте AMD RX580 8GB
Как и в случае с нормалями, потребление памяти сократилось, а частота кадров немного увеличилась.
Можно дополнительно уменьшить размер атрибута индексов ячейки, если хранить их не во float, а в int16 – сетки с числом ячеек более 32767 по одной из размерностей нам не встречались, не говоря уж о том, что такой огромный размер сетки не переварит ни одна рабочая станция.
Меняем тип данных индекса на int16 (придется сдвинуть индексы на 1, чтобы не потерять знак в нуле):
// …
// УДАЛЕНО // std::vector<float> a_position, a_index, a_property;
std::vector<float> a_position, a_property;
std::vector<int16_t> a_index;
// …
// записываем атрибуты вершины
a_position.insert(a_position.end(), {v.x, v.y, v.z});
// запишем текстурные координаты в знаки индексов ячейки.
// прибавим 1 к индексу, чтобы знак не потерялся в нуле
a_index.insert(a_index.end(), {static_cast<int16_t>((i+1) * texcoords[0]),
static_cast<int16_t>((j+1) * texcoords[1]),
static_cast<int16_t>(k) });
// …
// загружаем атрибуты в VBO
glNamedBufferStorage(_position_vbo, a_position.size() * sizeof (float), a_position.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_cell_index_vbo, a_index.size() * sizeof (int16_t), a_index.data(), gl::GL_NONE_BIT);
glNamedBufferStorage(_property_vbo, a_property.size() * sizeof (float), a_property.data(), gl::GL_NONE_BIT);
// …
// назначаем все атрибуты в VAO
// position
glVertexArrayVertexBuffer(_vao, 0, _position_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 0, 0);
glVertexArrayAttribFormat(_vao, 0, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 0);
// cell index
glVertexArrayVertexBuffer(_vao, 1, _cell_index_vbo, 0, sizeof (int16_t) * 3);
glVertexArrayAttribBinding(_vao, 1, 1);
glVertexArrayAttribFormat(_vao, 1, 3, GL_SHORT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 1);Запускаем, и…
Видим, что рендерер невероятно лагает — более 200 мс на кадр. Как же так?
Все дело в выравнивании атрибутов в памяти. Большинство видеокарт требуют, чтобы атрибут очередной вершины был выравнен по 32 битам. Очевидно, что наш атрибут с тремя компонентами из int16 выровнен всего лишь по 16 битам, что и приводит к неадекватной производительности. Решить проблему просто — добавим ещё одну компоненту для выравнивания:
// …
std::vector<float> a_position, a_property;
std::vector<int16_t> a_index;
// для каждой вершины 3 координаты (x, y и z)
a_position.reserve(3 * vertex_count);
// + три индекса (с выравниванием)
a_index.reserve(4 * vertex_count);
// …
// записываем атрибуты вершины
a_position.insert(a_position.end(), {v.x, v.y, v.z});
// запишем текстурные координаты в знаки индексов ячейки.
// прибавим 1 к индексу, чтобы знак не потерялся в нуле
a_index.insert(a_index.end(), {static_cast<int16_t>((i+1) * texcoords[0]),
static_cast<int16_t>((j+1) * texcoords[1]),
static_cast<int16_t>(k),
0});
// …
// назначаем все атрибуты в VAO
// position
glVertexArrayVertexBuffer(_vao, 0, _position_vbo, 0, sizeof (float) * 3);
glVertexArrayAttribBinding(_vao, 0, 0);
glVertexArrayAttribFormat(_vao, 0, 3, GL_FLOAT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 0);
// cell index
glVertexArrayVertexBuffer(_vao, 1, _cell_index_vbo, 0, sizeof (int16_t) * 4);
glVertexArrayAttribBinding(_vao, 1, 1);
glVertexArrayAttribFormat(_vao, 1, 4, GL_SHORT, GL_FALSE, 0);
glEnableVertexArrayAttrib(_vao, 1);
//…
// вершинный шейдер:
#version 440
// позиция
layout(location=0) in vec3 a_pos;
// индекс ячейки
layout(location=1) in ivec4 a_ind;
//…Этот фикс вернул производительность к ожидаемой:
Память под атрибуты | FPS в лучшем случае | FPS в худшем случае | |
До оптимизаций | 2 484,29 Мб | 54,3 | 17,7 |
Без нормалей | 1 932,23 Мб | 60,8 | 18,4 |
Без текстурных координат | 1 564,18 Мб | 65,8 | 19,0 |
16-битные индексы | 1 380,16 Мб | 70,4 | 19,3 |
Таблица 3 Сравнение потребления памяти и производительности на видеокарте AMD RX580 8GB
Объём потребляемой памяти ещё немного сократился, а производительность немного увеличилась.
На этом этапе мы сделали все очевидные оптимизации атрибутов, и их итоговый список выглядит так:
координаты вершины (3*4 байт);
индексы ячейки * текстурные координаты (4*2 байт);
значение свойства в ячейке (4 байта).
Теперь каждая вершина занимает в памяти не 48 байт, а 24 байта – в два раза меньше! Общий объём потребляемой видеопамяти сократился в 1,8 раза.
Оптимизируем производительность в худшем случае
В таблицах сверху мы уже видели колонку «FPS в худшем случае». Что же это за случай, и почему всё так плохо?
На самом деле, чтобы увидеть этот «худший случай», достаточно всего лишь развернуть камеру и посмотреть на сетку с обратной стороны. Частота кадров сразу падает в 3 раза, что очень сильно раздражает пользователя.
Причина такого значительного падения производительности кроется в порядке растеризации. Видеокарты обязаны растеризовать треугольники последовательно (или так, что результат эквивалентен последовательному) — это важно для корректности блендинга. К тому же, число треугольников в сетке настолько велико, что параллельно их все растеризовать всё равно невозможно.
Однако порядок растеризации влияет не только на блендинг, но и быстродействие при рендеринге с включённым тестом глубины. Представим следующую ситуацию:

Рендерим несколько треугольников, которые с точки зрения камеры перекрывают друг друга.
Если с точки зрения камеры треугольники рендерятся в порядке от дальнего к ближнему, то каждый треугольник пройдёт тест глубины, и все его пиксели запишутся в фреймбуфер. Если же треугольники рендерятся в обратном порядке — от ближнего к дальнему с точки зрения камеры, то первый треугольник перекроет остальные в буфере глубины, а остальные треугольники не пройдут тест глубины и не будут записывать свои пиксели в фреймбуфер. Кроме того, на всех современных видеокартах реализована оптимизация Early Z Rejection, благодаря которой фрагментный шейдер даже не запускается для фрагментов, не прошедших тест глубины.
Вернёмся к нашему рендереру и вспомним, в каком порядке мы генерируем вершины:
// …
// для каждой рассматриваемой ячейки
for (uint32_t i = 0; i < _property.ni; ++i) {
for (uint32_t j = 0; j < _property.nj; ++j) {
for (uint32_t k = 0; k < _property.nk; ++k) {
// если ячейка может отрисовываться (они фильтруются по маске)
if (_mask.at(i, j, k)){
// …Видно, что мы просто генерируем вершины ячеек в порядке их хранения в трёхмерном массиве.
Это объясняет, почему с одной стороны сетки частота кадров высокая, а с другой — низкая. Во втором случае мы просто смотрим на сетку с той стороны, в какую растут индексы ячеек — из-за этого каждая следующая грань находится ближе к камере, чем предыдущая, и всегда проходит тест глубины.
Решение этой проблемы тривиально — нужно всего лишь генерировать ячейки так, чтобы с любой возможной точки зрения камеры грани ячеек располагались в порядке от ближней к дальней. А для этого просто представим нашу сетку как луковицу — сначала сгенерируем все грани самого внешнего слоя, затем сгенерируем все грани следующего слоя и так далее, до самого центра луковицы.
Чтобы было проще закодить этот алгоритм, вынесем часть кода, отвечающую за генерацию граней одной ячейки, в лямбду:
// …
// + значение свойства ячейки
a_property.reserve(vertex_count);
auto calc_cell = [this, &a_position, &a_index, &a_property](size_t i, size_t j, size_t k)
{
// буфер, куда записываются вершины ячейки
std::array<vec3, 8> cell_vertices;
// если ячейка может отрисовываться (они фильтруются по маске)
if (_mask.at(i, j, k)){
// рассчитаем 8 вершин, соответствующих ячейке
get_cell_vertices(_coord, _zcorn, i, j, k, cell_vertices);
// …
};Затем напишем такой, страшный на вид, цикл:
size_t min_dim = std::min({_property.ni, _property.nj, _property.nk});
size_t max_layers = min_dim / 2 + 1;
size_t oi = 0, oj = 0, ok = 0;
size_t ni = _property.ni, nj = _property.nj, nk = _property.nk;
for (size_t layer = 0; layer < max_layers; ++layer) {
for (size_t k : {ok, nk-1}) {
for (size_t i = oi; i < ni; ++i) {
for (size_t j = oj; j < nj; ++j) {
calc_cell(i, j, k);
}
}
if (ok >= nk-1) break;
}
for (size_t j : {oj, nj-1}) {
for (size_t i = oi; i < ni; ++i) {
for (size_t k = ok+1; k < nk - 1; ++k) {
calc_cell(i,j,k);
}
}
if (oj >= nj - 1) break;
}
for (size_t i : {oi, ni-1}) {
for (size_t j = oj+1; j < nj-1; ++j) {
for (size_t k = ok+1; k < nk-1; ++k) {
calc_cell(i, j ,k);
}
}
if (oi >= ni - 1) break;
}
++oi; ++oj; ++ok;
--ni; --nj; --nk;
}Наверняка есть много способов написать алгоритм, который обходит трёхмерный массив в луковичном порядке — здесь приведен самый простой, который придуман за 5 минут. Производительность этих циклов не имеет большого значения, т. к. каждая итерация (генерация граней) намного дороже, чем сами циклы.
Запускаем рендерер и видим, что частота кадров всегда высокая и практически не меняется, независимо от того, с какой стороны мы смотрим на сетку. Худший случай теперь работает в три раза быстрее, чем до оптимизации!
Память под атрибуты | FPS в лучшем случае | FPS в худшем случае | |
До оптимизаций | 2 484,29 Мб | 54,3 | 17,7 |
Без нормалей | 1 932,23 Мб | 60,8 | 18,4 |
Без текстурных координат | 1 564,18 Мб | 65,8 | 19,0 |
16-битные индексы | 1 380,16 Мб | 70,4 | 19,3 |
Луковичный порядок | 1 380,16 Мб | 67,4 | 64,9 |
Таблица 4. Сравнение потребления памяти и производительности на видеокарте AMD RX580 8GB
Уменьшаем пиковое потребление оперативной памяти
В первой части мы обратили внимание на то, что вершины генерируются в промежуточные буферы в оперативной памяти и лишь затем передаются в буферы OpenGL. Это значит, что в худшем случае выделяется двойной объём памяти — одна копия в наших массивах, а вторая копия может выделяться драйвером перед передачей в видеопамять.
Для решения этой проблемы ещё в OpenGL 1.5 была добавлена возможность сделать память буфера видимой в адресном пространстве процесса с помощью функции glMapBuffer(). Эта функция возвращает указатель, по которому можно писать или читать данные буфера «напрямую». В случае современных интегрированных видеокарт, это мало чем отличается от работы с обычной оперативной памятью (однако, для старших поколений интегрированных видеокарт это не всегда так). Для дискретных видеокарт механизм работы с такой памятью обычно зависит от специфики конкретной модели видеокарты и версии драйвера и не документирован.
Избавляемся от промежуточных массивов и сохраняем атрибуты вершин по указателям, полученным через glMapBuffer():
void CornerPointGrid::_gen_vertices_and_indices(size_t quad_count) {
const size_t vertex_count = quad_count * 4;
// загружаем атрибуты в VBO
glNamedBufferStorage(_position_vbo, 3 * vertex_count * sizeof (float), nullptr, gl::GL_MAP_WRITE_BIT);
glNamedBufferStorage(_cell_index_vbo, 4 * vertex_count * sizeof (int16_t), nullptr, gl::GL_MAP_WRITE_BIT);
glNamedBufferStorage(_property_vbo, vertex_count * sizeof (float), nullptr, gl::GL_MAP_WRITE_BIT);
auto a_position = reinterpret_cast<float*>(glMapNamedBuffer(_position_vbo, gl::GL_WRITE_ONLY));
auto a_index = reinterpret_cast<int16_t*>(glMapNamedBuffer(_cell_index_vbo, gl::GL_WRITE_ONLY));
auto a_property = reinterpret_cast<float*>(glMapNamedBuffer(_property_vbo, gl::GL_WRITE_ONLY));
// …
// для каждой вершины в полигоне
for (int vii = 0; vii < 4; ++vii){
// координаты очередной вершины
const vec3& v = cell_vertices[quad[vii]];
ivec2 texcoords = quad_vertices_texcoords[vii];
// записываем атрибуты вершины
a_position[0] = v.x;
a_position[1] = v.y;
a_position[2] = v.z;
a_position += 3;
// запишем текстурные координаты в знаки индексов ячейки.
// прибавим 1 к индексу, чтобы знак не потерялся в нуле
a_index[0] = static_cast<int16_t>((i+1) * texcoords[0]);
a_index[1] = static_cast<int16_t>((j+1) * texcoords[1]);
a_index[2] = static_cast<int16_t>(k);
a_index[3] = 0;
a_index += 4;
a_property[0] = _property.at(i, j, k);
a_property += 1;
}То же самое делаем и с индексами:
// …
// создадим массив индексов - на каждую грань два треугольника
size_t indices_count = quad_count * 6;
glNamedBufferStorage(_indexbuffer, indices_count * sizeof (uint32_t), nullptr, gl::GL_MAP_WRITE_BIT);
auto indices = reinterpret_cast<uint32_t*>(glMapNamedBuffer(_indexbuffer, gl::GL_WRITE_ONLY));
for (size_t i = 0; i < quad_count; ++i)
for (uint32_t j = 0; j < 6; ++j)
// индекс очередной вершины при составлении треугольников
*indices++ = static_cast<uint32_t>(i * 4 + quad_to_triangles[j]);
glUnmapNamedBuffer(_indexbuffer);
glUnmapNamedBuffer(_position_vbo);
glUnmapNamedBuffer(_cell_index_vbo);
glUnmapNamedBuffer(_property_vbo);
// …Убедившись, что всё работает как надо, проверим пиковое потребление оперативной памяти:
Память под атрибуты | Память процесса | Память процесса (пиковая) | |
До оптимизаций | 2 484,29 Мб | 3 258,55 Мб | 5 844,64 Мб |
Без нормалей | 1 932,23 Мб | 2 704,95 Мб | 4 738,06 Мб |
Без текстурных координат | 1 564,18 Мб | 2 336,84 Мб | 4 000,90 Мб |
16-битные индексы | 1 380,16 Мб | 2 151,87 Мб | 3 631,87 Мб |
glMapBuffer | 1 380,16 Мб | 2 152,14 Мб | 2 618,31 Мб |
Таблица 5. Сравнение потребления памяти на видеокарте AMD RX580 8GB
Видим, что пиковое потребление памяти процессом значительно уменьшилось, что позволяет быстро загружать большие сетки на одной и той же машине.
Неожиданная проблема
На этом мы планировали поставить точку, однако при тестировании на нескольких видеокартах Nvidia разных моделей и поколений (GTX 1050Ti, RTX 2070) обнаружилась весьма необычная проблема — производительность катастрофически упала до 400+ мс на кадр. С помощью git bisect мы определили, что проблема возникла именно после последней оптимизации с glMapBuffer(). Странным было и то, что на продакшн-версии движка эта проблема не воспроизводилась, как и на видеокартах AMD и Intel.
В отладочном выводе (GL_KHR_debug) были сразу замечены такие строки:
Buffer detailed info: Buffer object 1 (bound to NONE, usage hint is GL_DYNAMIC_DRAW) will use SYSTEM HEAP memory as the source for buffer object operations.
Buffer detailed info: Buffer object 1 (bound to NONE, usage hint is GL_DYNAMIC_DRAW) has been mapped WRITE_ONLY in SYSTEM HEAP memory (fast).
…Судя по логу, драйвер решил, что раз буфер создан с флагом GL_DYNAMIC_DRAW, то не нужно выделять под него видеопамять, ведь он всё равно будет очень часто перезаписываться. Вместо этого под буфер выделена обычная оперативная память, что и объясняет настолько низкую производительность.
Проблема в том, что мы нигде не указывали GL_DYNAMIC_DRAW – у нас даже нет такой возможности, ведь мы использовали glBufferStorage(), у которого такого флага нет.
Для эксперимента мы переделали выделение памяти в буфере на устаревший glBufferData(…, GL_STATIC_DRAW), после чего проблема с производительностью исчезла, а в логе появились такие сообщения:
Buffer detailed info: Buffer object 1 (bound to NONE, usage hint is GL_STATIC_DRAW) will use VIDEO memory as the source for buffer object operations.
Buffer detailed info: Buffer object 1 (bound to NONE, usage hint is GL_STATIC_DRAW) has been mapped in HOST memory
…Насколько мы можем судить, подсказки использования буферов драйвер Nvidia воспринимает слишком буквально – в нашем случае GL_DYNAMIC_DRAW оказался неудачным значением по умолчанию. Не стоит сильно их винить, поскольку это в большей степени недоработка спецификации GL_ARB_buffer_storage, не предвидевшей возможные проблемы из-за сохранения обратной совместимости со старым способом выделения памяти.
Бенчмарк
Сравним производительность рендерера до и после оптимизации на нескольких моделях видеокарт:
Видеокарта | FPS в лучшем случае | FPS в худшем случае |
AMD RX580 | 54,3 – 67,4 (+24%) | 17,7 – 64,9 (+366%) |
Nvidia GTX 1050Ti | 29.9 – 40,2 (+34%) | 20.9 – 39,5 (+88%) |
Nvidia RTX 2070 | 116 – 150 (+29%) | 36,3 – 149 (+410%) |
Intel UHD 630 | 6 – 12 (+100%) | 5 – 12 (+140%) |
Таблица 6. Сравнение производительности до и после оптимизаций
На протестированных видеокартах прирост производительности составил около 30% для хорошего случая, а для худшего случая – от 80% до 410%! Отдельно можно выделить ту самую встроенную видеокарту, речь о которой шла в заголовке. Всё равно не блеск, конечно, но дышать стало полегче. И никто не собирается останавливаться на достигнутом!
Заключение
В этой статье мы рассмотрели несколько оптимизаций рендерера угловой геометрии, которые снизили объём потребляемой видеопамяти почти в два раза и увеличили частоту кадров в три с лишним раза. Теперь наш рендерер сможет отобразить сетки большего размера на маломощных офисных машинах и сетки размером порядка миллиарда ячеек на рабочих станциях.
Конечно, это не все возможные оптимизации — например, можно ещё уменьшить размер атрибутов, наложив некоторые ограничения на входные данные. Можно улучшить алгоритм отсечения невидимых граней, о котором упоминалось в первой части статьи; можно уменьшить число уникальных вершин при генерации граней одной ячейки; можно генерировать вершины не разом, а чанками... Для примера, продакшн-версия движка, где мы реализовали подобные оптимизации, потребляет ещё в полтора раза меньше памяти, а по сравнению с изначальной реализацией — почти в четыре раза меньше памяти!
На этом мы заканчиваем цикл статей о рендеринге угловой геометрии. Надеемся, что обе части оказались интересными и полезными. В комментариях ждем ваших вопросов; будем рады обсудить описанные и новые способы оптимизации рендерера!
