Comments 11
На первой картинке мы видим питона, который проглатывает кота… Да и вообще вся статья о том, как кортить питона котиками :)
Критерий котиков для определения качества работы нейросети. Как только нейросеть достигнет того уровня прогресса, который позволит безошибочно определять котиков на фото, она будет признана совершенной.
Macbook Air 2017, max ~20 fps, avg 14

Код адаптирован под Macbook (камеру) ниже.
Код адаптирован под Macbook (камеру) ниже.
import cv2
import numpy as np
import time
from time import sleep
import datetime as dt
cap = cv2.VideoCapture(0)
prototxt = 'models/solver.prototxt'
model = 'models/squeezenet_v1.1.caffemodel'
labels = 'models/synset_words.txt'
rows = open(labels).read().strip().split("\n")
classes = [r[r.find(" ") + 1:].split(",")[0] for r in rows]
#
net = cv2.dnn.readNetFromCaffe(prototxt, model)
# reset FPS meter
t0 = time.time()
while(True):
# take each frame
_, frame = cap.read()
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# only for the colors:
lower_blue = np.array([0,0,0])
upper_blue = np.array([255,255,255])
# threshold the HSV image to get only blue colors
mask = cv2.inRange(hsv, lower_blue, upper_blue)
# putting frame into blob
res = cv2.bitwise_and(frame,frame, mask= mask)
blob = cv2.dnn.blobFromImage(res, 1, (224, 224), (104, 117, 124))
# measuring the FPS
FPS = 1/(time.time() - t0)
t0 = time.time()
# trying to find the object
net.setInput(blob)
preds = net.forward()
preds = preds.reshape((1, len(classes)))
idxs = int(np.argsort(preds[0])[::-1][:1])
# creating text for label
text = "Label: {}, p = {:.2f}%, fps = {:.2f}".format(classes[idxs], preds[0][idxs] * 100, FPS)
# putting text on frame
cv2.putText(res, text, (5, 25), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)
# prewiev
cv2.imshow('res',res)
# saving results 1-image for ~2.5 secconds
# fname = 'pic_' + dt.datetime.now().strftime('%Y-%m-%d_%H-%M-%S') + '.jpg'
# cv2.imwrite(fname, res)
# exit from frame capturing
k = cv2.waitKey(5) & 0xFF
if k == 27:
break
cv2.destroyAllWindows()Кот на белом фоне. Постоянный белый фон на разных изображениях вероятнее всего — снег. На фоне снега гораздо вероятнее увидеть собаку чем кота, а еще вероятнее северную ездовую собаку. Все очень логично, хотя и не совсем верно)
Да, аргумент резонный. Кстати, Imagenet, на котором была обучена описываемая сеть, лежит в открытом доступе. Можно посмотреть исходные изображения здесь: image-net.org/synset?wnid=n02084071#
Лучше сделать распознавание объектов(именно объектов) а после определение их класса.
Работает прикольней, визуализирует интересней.
Данные о движении объектов можно записывать в базу.
Например перемещение котиков по комнате.
Работает прикольней, визуализирует интересней.

Данные о движении объектов можно записывать в базу.
Например перемещение котиков по комнате.
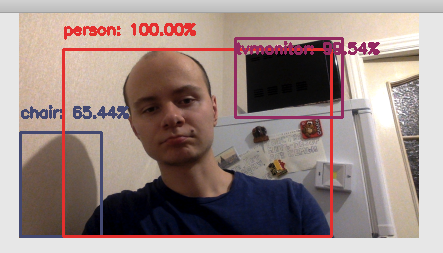
Добрый день! Идея статьи была в оценке качества классификации на нейронке с широким набором классов. Да, можно поставить SSD детектор на Raspberry, например MobileNet SSD (на примере с картинки, похоже, именно оно и есть). С рамочками изображение гораздо информативнее, плюс детектируются сразу несколько объектов в кадре. Но, надо заметить, что классов значительно меньше (в районе 20). Работает такой детектор также ощутимо медленнее. На CPU RPI B+ будет примерно 0,5...1 FPS. На PRI B+ с Movidius NCS в USB слоте получается 4 с небольшим FPS.
4 FPS… это конечно, очень печалит. можете код поправить, чтобы, raspberry просто выдавала в сеть поток, а более мощное железо использовало магию? у меня есть проект www.youtube.com/watch?v=Ia-2RAGq-mc, где можно поездить. построен на базу rpi-webcam interface. было бы интересно прикрутить к нему распознавание объектов.
кстати, для raspberry есть камера день/ночь c автоматическим переключением. пробовал, неплоха — ru.aliexpress.com/item/32845421674.html
кстати, для raspberry есть камера день/ночь c автоматическим переключением. пробовал, неплоха — ru.aliexpress.com/item/32845421674.html
Sign up to leave a comment.
Котики vs нейросеть 2. Или запускаем SqueezeNet v.1.1 на Raspberry Zero в realtime (почти)