С того времени, как мы занялись обучением робототехнике школьников (а произошло это два с лишним года назад), мы работаем в основном на собственных разработках. Главная причина тому — закрытость всех популярных конструкторов. Всякие Lego, Fishertecnnic, Tetrix очень трудно с чем-то совместить, тем более трудно их модифицировать, производители всячески препятствуют этому, потому простора для творчества остается очень мало.
Создатели Мультипло придерживаются ровно той же идеологии, что и мы: максимальная открытость и соответствие распространенным стандартам, совместимость со всем на свете.
Основным разработчиком Мультипло является аргентинская контора под названием RobotGroup. Они, в общем-то, такие же технари, как и мы; занимаются обучением школьников и попутно торгуют своими наработками. Производство организовали в Китае. (К слову, по ходу работы с ними я глубоко проникся тем, что значит глобализация — это когда русские обсуждают с аргентинцами особенности денежных расчетов в Гонконге.)
Платформу Мультипло я бы разделил на следующие составляющие: механический конструктор, электронная периферия, управляющий модуль и софт.
Механика

Наиболее интересная часть. Состоит из следующих элементов:
- Основные детали, нарезанные на лазерном станке из трехмиллиметрового пластика.
- Метизы: винты и гайки М3 + различные шайбы к ним, пластиковые заклепки.
- Алюминиевые уголки.
- Шины на колеса.
Основные детали можно нарезать самому на лазерном или фрезерном станке, метизы — купить в ближайшем магазине строительного крепежа. Шины мы собираемся самостоятельно лить из силикона. Алюминиевые уголки, по всей видимости, только из Китая.
Диски колес здесь тоже собираются из пластин:

Между пластин вставляются винты с головкой под внутренний шестигранник, которые зажимают ось мотора:

Отдельного внимания заслуживают пластиковые заклепки:

Собственно это основной элемент крепежа в конструкторе. На заклепках все собирается в несколько раз быстрее, чем на винтах. Недостаток их в том, что формально они одноразовые, на самом деле количество использований ограничено; видимо, поэтому их в других конструкторах и не используют.
От опыта сборки ощущение очень хорошее, простор для творчества гораздо больше, чем с Лего.
Периферийная электроника
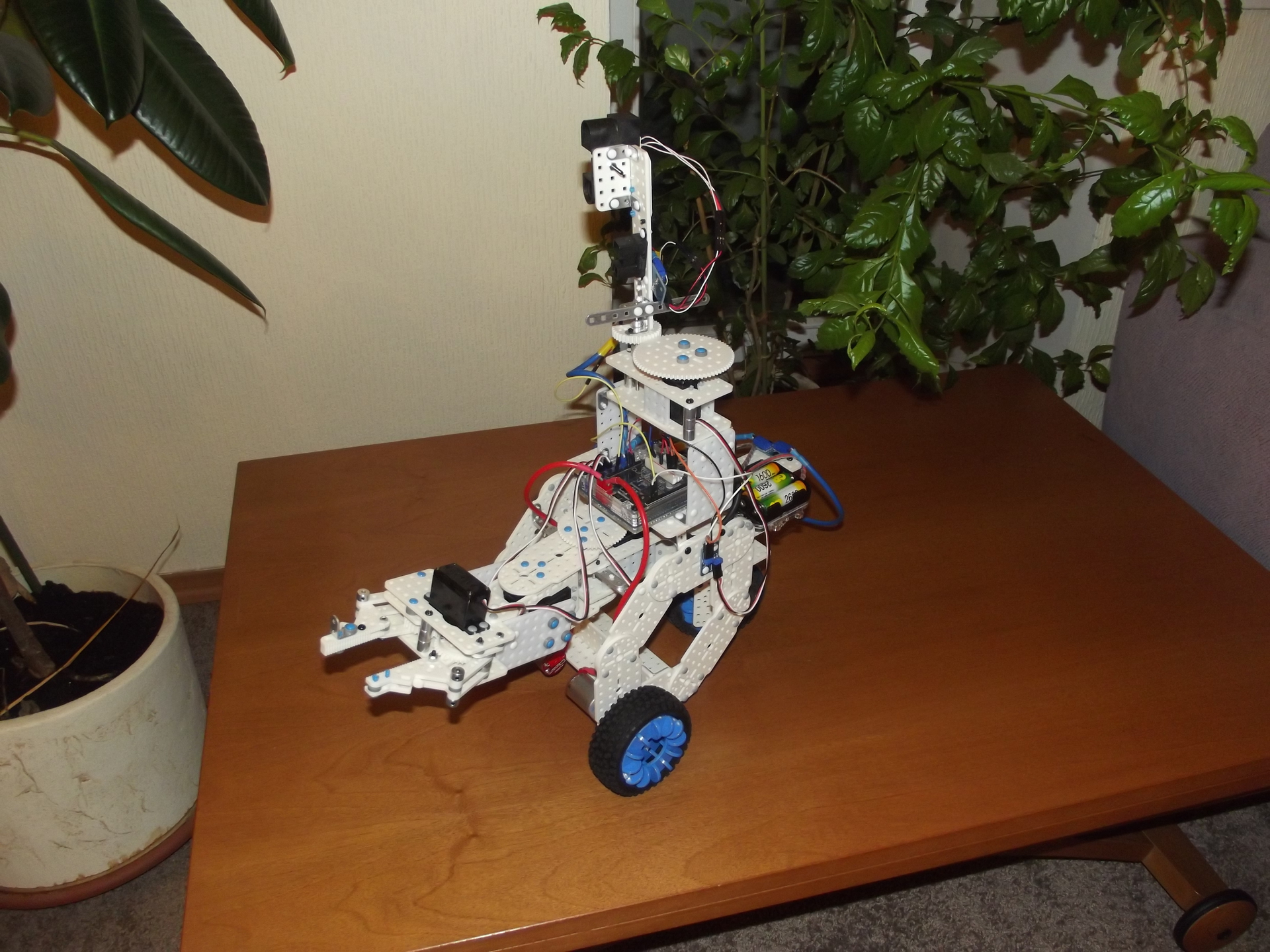
Все стандартно: такие датчики, моторчики, сервы можно купить в любом специализированном магазине. Особенность разве в том, что моторы очень мощные: конструкция с заглавной фотографии передвигается по ровной поверхности со скоростью около метра в секунду.Управляющий модуль

Собственная аргентинская разработка на базе атмеги 328. Что есть:
- Стандартные разъемы ардуины.
- Драйвер на два мотора 12В.
- Дополнительная разводка портов под трехпиновые периферийные устройства.
- Зумер.
- Кнопки Run, Reset и Power.
- Еще какие-то выходы, с которыми я не разбирался.
Изюминка в следующем: плата общается с компьютером не через последовательный порт, как обычно, а через HID-интерфейс. Это, с одной стороны удобно, ибо нет проблем с обнаружением порта, с другой стороны после загрузки кода нет возможности нормально обмениваться данными с платой (делать это можно только с помощью специального софта, с которым тоже проблемы). В последних версиях этой платы есть возможность работать и по последовательному порту (на плате есть соответствующий джампер).
И все бы хорошо, беда только в том, что плата очень ненадежна: примерно треть из тех, которые мы активно используем, уже вылетела. Чтобы их заменить аргентинцы просят сначала выслать сломанные обратно; почтовый товарооборот между Шанхаем и Екатеринбургом — это сами понимаете.
Софт
Аргентинцы сделали собственную сборку arduino IDE, добавили туда модуль для работы с HID-интерфейсом и библиотеки для работы с драйверами двигателей и другим.
Вторая штука гораздо интереснее — это графическая среда программирования minibloq:

В графических средах я не большой специалист, но эта мне пока больше всего нравится — здесь сразу видно генерируемый код, есть возможность его править, с этой среды легко перейти на обычное кодирование.
Заказ и стоимость
Мы для своего конкурса заказывали достаточно большую партию. После долгого обсуждения и чесания репы сделали это следующим образом: отправили аргентинцам по почте список того, что нам нужно, они нам сообщили сумму, мы на эту сумму набрали произвольной шняги в их интернет-магазине и оплатили. Доставку организовали через фирму, которая нам обычно привозит всякие ништяки с таобао.
По стоимости, если сравнивать, например, с Лего, получается следующее: за ту же цену вы получаете примерно столько же электроники (правда, не всегда работающей) и в несколько раз больше механики.
Резюме
Механика отличная, вырезайте ее сами, заказывайте из Китая — что вам больше нравится.Разрабатывать собственный управляющий модуль, организовывать его производство — это, мне кажется, было ошибкой со стороны создателей, гораздо проще и надежнее было взять стандартную ардуину с каким-нибудь шилдом. Помимо прочего это дает еще эффект модульности: перестал устраивать текущий шилд — поставили другой.
Дальнейшее направление нашей работы — развивать механику мультипло и ставить на нее стандартные управляющие модули.
Ссылки:
multiplo.org — основной сайт проекта.
multiplo.org/wp-content/uploads/2013/07/N8.BuildingKit.v1.0.PartsList.png — состав набора.
www.youtube.com/watch?v=TRj5SiNW1y4 — шагающий робот.
youtu.be/LbMC282NXvo — моя поделка.
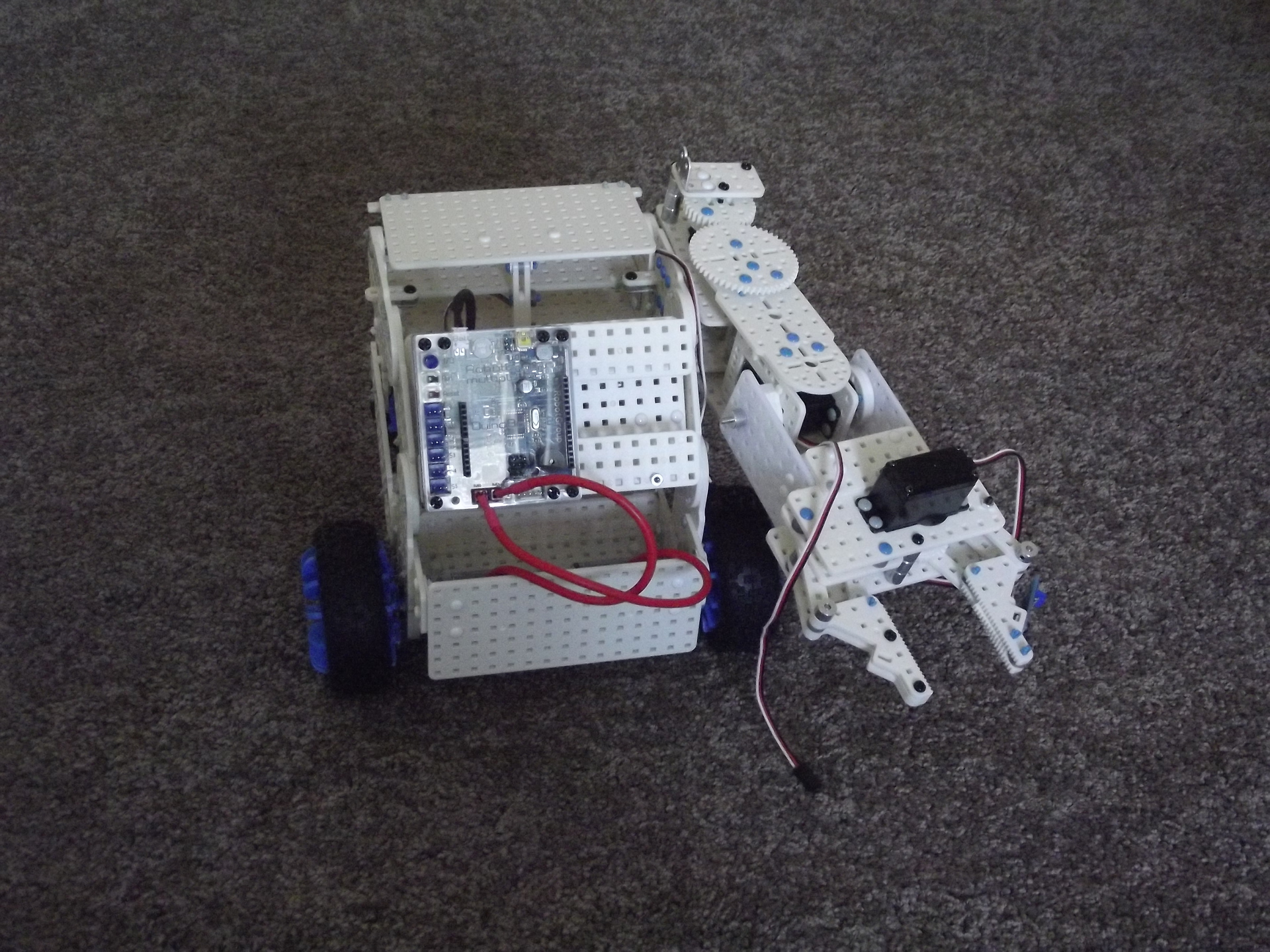
Еще фотографии:
Клешня:



Немного рекламы для Екатеринбурга
У нас лежит несколько наборов без управляющих модулей (модули сломаны, находятся на пути в Китай). Заходите, отдадим по себестоимости.

{kind=link}