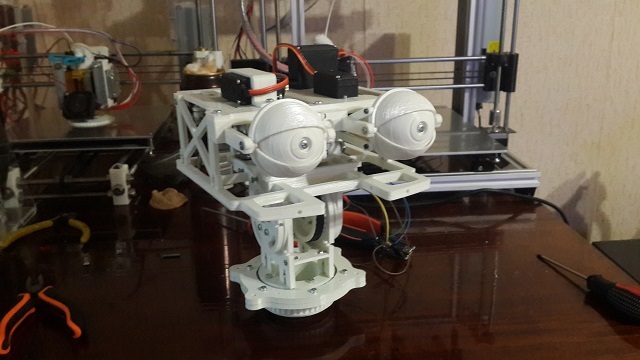
Всем привет. Сегодня речь пойдет о голове промо-робота Oscar. Зачастую людям интересно общаться c роботом как с себе подобным: смотреть в лицо и искать эмоциональный отклик в ходе диалога. Поэтому голова нашего промо-робота должна стать одним из основных элементов, привлекающих внимание человека.
Чтобы голова действительно “ожила”, мы обозначили следующие требования:
Голова должна иметь две степени свободы: наклон и поворот
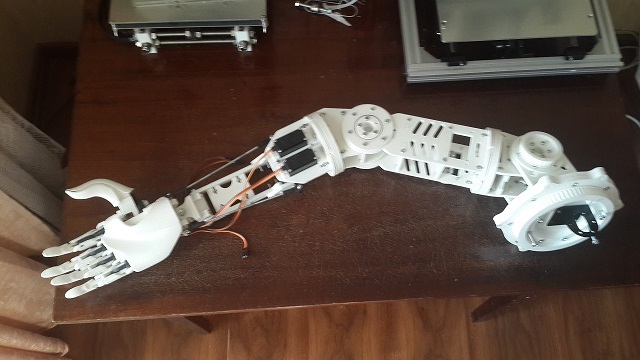
Сегодня мы хотим рассказать об устройстве манипулятора промо-робота Oscar. Хотя изначально к манипулятору не были предъявлены жесткие индустриальные требования, тем не менее нашей целью было сделать практичное и эстетичное решение, при этом не очень дорогое и относительно несложное в изготовлении в домашних условиях.
Длина манипулятора от плеча до кончиков пальцев составляет 0.6 метров, вес — 2.25 кг. Материалы изготовления — PLA. Манипулятор условно можно разделить на 3 компонента:
Бионическая кисть
Запястье (2 степени свободы)
Локтевой и плечевой суставы (5 степеней свободы)
Связано это с тем, что каждый из компонентов имеет свое техническое решение.
Всем привет! Уже почти год ничего нового не публиковалось по поводу судьбы сервисного робота Tod Bot. Однако, все это время мы не сидели сложа руки, и сегодня можем рассказать о достигнутых успехах. Данный пост не претендует на рецепт проектирования, а только лишь описывает наш путь.
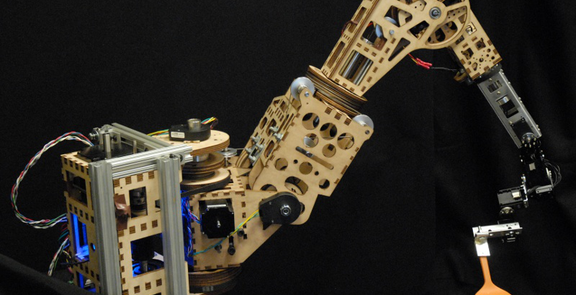
Занимаясь нашим проектом, мы дошли до задач захвата предметов манипулятором. На тот момент у нас уже были решены такие задачи, как распознавание предметов и управления манипулятором. Манипулятор был сделан из конструктора и использовал обычные сервоприводы, и его грузоподъёмность и возможность управления скоростью оставляли желать лучшего(контроллер, который мы использовали, не поддерживал динамическое управление скоростью сервоприводами). Тогда перед нами стал выбор: заказать новый контроллер и использовать то, что уже есть или же решить проблему кардинально и получить манипулятор, который бы нас устраивал по всем параметрам.
Всем привет! Мы — небольшая команда разработчиков сервисного робота Tod Bot. В своей практике мы широко используем фреймворк ROS, постоянно решая с его помощью насущные для нашего робота задачи: от управления передвижением и обработки данных с сенсоров до автономной навигации в помещении, распознавания речи и образов, высокоуровневого поведения робота.
Сегодня в рамках конкурса на образовательной платформе Stepic мы анонсируем онлайн-курс «Программирование робота вместе с ROS». Наш курс будет интересен людям, неравнодушным к программированию и робототехнике, и готовым приобрести новые знания и навыки по разработке ПО для роботов, конечно же, приложив при этом необходимые усилия. Получить представление о содержимом курса вы можете из небольшого интро-видео.
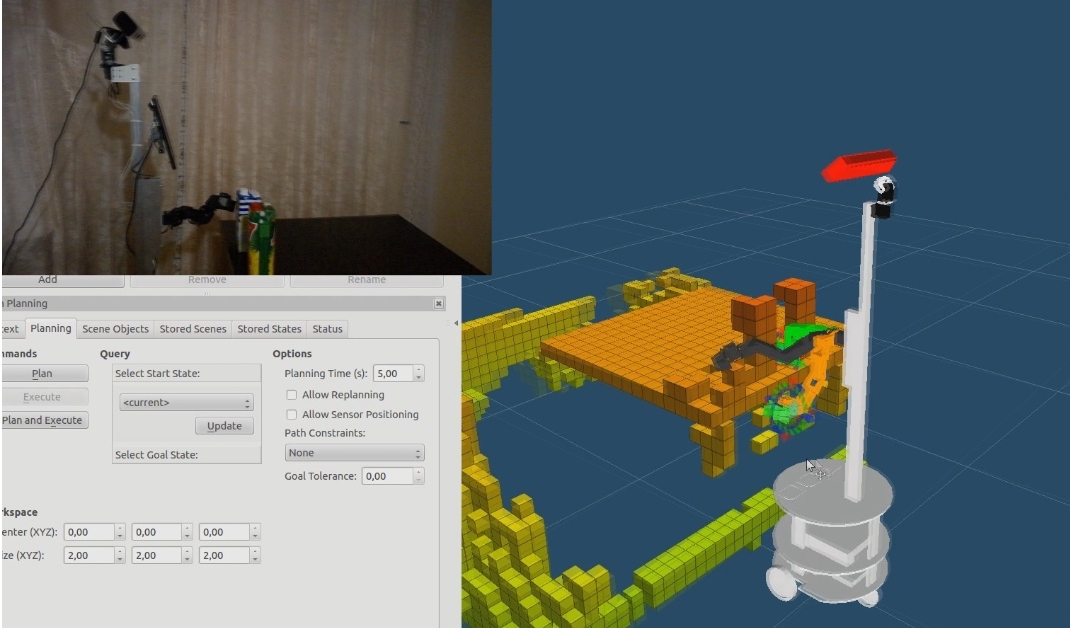
Привет Хабр! А вот и снова мы! На перекор множествам скептиков, которые нередко встречались на нашем пути, мы продолжаем развивать проект «Робот Tod Bot». Данный пост является продолжением знакомства с модулем MoveIt как инструментом управления манипулятором.
Прежде всего хочется сказать, что нам удалось достигнуть значительных результатов в задаче захвата и перемещения предметов посредством манипулятора, а также в распознавании объектов, но обо всем по порядку.
После неудачного предыдущего поста и вынужденного отсутствия мы возвращаемся на Хабр и продолжаем освещать проект «Робот Tod Bot». В данном посте хочется рассказать о пополнение функционала робота – реализации телеприсутствия. Теперь управление роботом доступно из любой точки мира. Как это работает и как, по нашему мнению, должен выглядить хороший интерфейс телеприсутсвия – читайте под катом. Ну и, конечно, всеми любимая картинка в эту тему.
Всякий раз когда речь заходит о роботах, то люди представляют машину, умеющую делать что-то полезное в нашем материальном мире, а не только вести диалоги и перемещаться. Благодаря развитию нынешних технологий стало гораздо легче использовать манипуляторы в собственных проектах. В данной статье речь пойдет о таком замечательном ПО для управления манипулятором как MoveIt и некотором функционале, реализованном на его базе в нашем проекте сервисного робота Tod.
Второй из законов робототехники, сформулированных небезызвестным американским писателем-фантастом Айзеком Азимовым, гласит, что робот должен повиноваться приказам, которые дает человек. Какими способами можно отдавать приказы роботу? Если верить большинству фантастических фильмов, то наиболее комфортным способом общения с роботом является естественная человеческая речь. Именно поэтому мы предоставили роботу Tod, как настоящему слуге человека, долгожданную возможность понимания голосовых команд управления и синтеза речи на русском языке. Теперь достаточно, например, отдать приказ «Робот, езжай на кухню», чтобы робот выполнил необходимую задачу. Под катом мы расскажем подробнее об используемом на роботе ПО для распознания и синтеза речи, а в видеороликах покажем примеры использования голосовых команд.
Вектор развития нашего проекта зависит от мнения хабрасообщества. Заинтересованы ли вы в использовании робота Tod как open source платформы для разработчиков? Пожалуйста, проголосуйте в нашем опросе.