Знаете, меня порой удивляет причудливая структура общественного мнения. Взять к примеру технологию 3D-визуализации. Огромный общественный резонанс вызывают в последнее время технологии очков виртуальной реальности:
Oculus Rift,
Google Glass. Но ведь ничего нового тут нет, первые шлемы виртуальной реальности появились ещё в конце 90-х. Да, они были сложны, они опередили своё время, но почему тогда это не вызывало такого WOW-эффекта? Или 3D-принтеры. Статьи о том, как они круты или как быстро они захватят мир появляются в информационном поле два раза в неделю последние года три. Я не спорю, это круто и мир они таки захватят. Но ведь эта технология была создана ещё в 80х и с тех пор вяло прогрессирует. 3D-телевидение?
1915 год…
Технологии все эти хороши и любопытны, но откуда столько шумихи из-за каждого чиха?
Что, если я скажу, что в последние 10 лет была изобретена, разработана и внедрена в массовое производство технология 3D съёмки, очень сильно отличающаяся от любой другой? При этом технология уже повсеместно используемая. Отлаженная и доступная простым людям в магазинах. Вы слышали про неё? (наверное только специалисты по робототехнике и сопутствующим областям науки уже догадались, что я говорю про ToF-камеры).
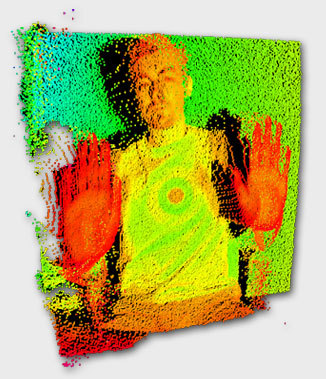
Что такое ToF камера? В русской Википедии (
англ) вы не найдёте даже коротенького упоминания о том, что это такое. «Time of flight camera» переводится как «Времяпролётная камера». Камера определяет дальность через скорость света, измеряя время пролёта светового сигнала, испускаемого камерой, и отражённого каждой точкой получаемого изображения. Сегодняшним стандартом является матрица 320*240 пикселей (следующее поколение будет 640*480). Камера обеспечивает точность измерения глубины порядка 1 сантиметра. Да-да. Матрица из 76800 сенсоров, обеспечивающих точность измерения времени порядка 1/10,000,000,000 (10^-10) секунды. В продаже. За 150 баксов. А может вы ею даже пользуетесь.
А теперь чуть подробнее про физику, принцип работы, и где вы встречали эту прелесть.







 Всем привет! Это уже двадцать второй выпуск дайджеста на Хабрахабр о новостях из мира Python. В этом выпуске вы найдете статьи о MicroPython, сравнение производительности Python, Numba и C ++, основах веб скрапинга и многое другое.
Всем привет! Это уже двадцать второй выпуск дайджеста на Хабрахабр о новостях из мира Python. В этом выпуске вы найдете статьи о MicroPython, сравнение производительности Python, Numba и C ++, основах веб скрапинга и многое другое.