
Содержание
- Что такое тензор и для чего он нужен?
- Векторные и тензорные операции. Ранги тензоров
- Криволинейные координаты
- Динамика точки в тензорном изложении
- Действия над тензорами и некоторые другие теоретические вопросы
- Кинематика свободного твердого тела. Природа угловой скорости
- Конечный поворот твердого тела. Свойства тензора поворота и способ его вычисления
- О свертках тензора Леви-Чивиты
- Вывод тензора угловой скорости через параметры конечного поворота. Применяем голову и Maxima
- Получаем вектор угловой скорости. Работаем над недочетами
- Ускорение точки тела при свободном движении. Угловое ускорение твердого тела
- Параметры Родрига-Гамильтона в кинематике твердого тела
- СКА Maxima в задачах преобразования тензорных выражений. Угловые скорость и ускорения в параметрах Родрига-Гамильтона
- Нестандартное введение в динамику твердого тела
- Движение несвободного твердого тела
- Свойства тензора инерции твердого тела
- Зарисовка о гайке Джанибекова
- Математическое моделирование эффекта Джанибекова
Введение
Наконец-то мы подошли к довольно интересной теме — выбору параметров, однозначно определяющих ориентацию твердого тела в пространстве. Исторически наиболее популярными являются углы поворота — они в первую очередь упоминаются в классических учебниках теоретической механики.
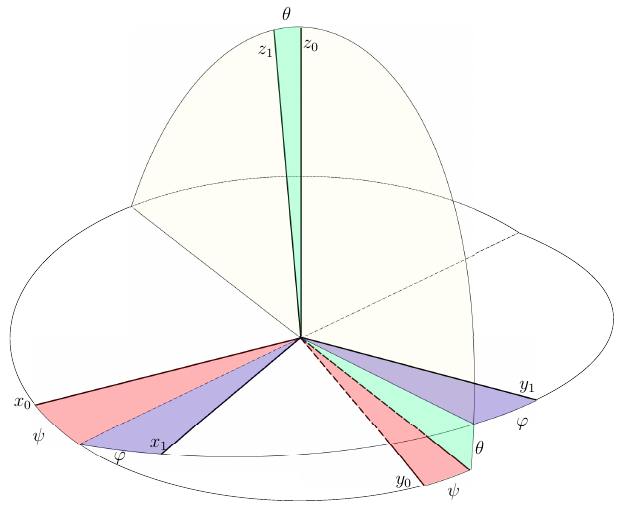
Рис.1. Углы Эйлера — параметры, знакомые каждому, кто занимался компьютерной графикой и моделированием пространственного движения тел. И каждый, кому они знакомы, знает, насколько проблематичным бывает их использование.
Обычно углы поворота используют совместно с декартовой системой координат, при этом говорят, что связанная система координат может быть совмещена с базовой путем трех последовательных поворотов вокруг её осей. При этом каждый следующий поворот осуществляется вокруг оси, полученной после предыдущего поворота. Кроме того, следующий поворот не должен происходить вокруг оси, относительно которой совершен предыдущий поворот. В связи с этим существует 12 различных комбинаций углов поворота, самыми известными из которых являются углы Эйлера (рисунок 1). Базовую систему координат поворачивают на угол
Использование углов Эйлера всем хорошо — их число совпадает с числом вращательных степеней свободы твердого тела, а значит они не порождают избыточных уравнений связей. Но, даже не прибегая к громоздким формулам, по рисунку 1, можно догадаться, где кроется проблема.


 Данный протокол уже много где описан. Я хочу показать и подробно описать свою реализацию на конкретном микроконтроллере. Мне было необходимо принимать сигнал с пульта RGB — такого, как на картинке. Его система команд приведена внизу статьи.
Данный протокол уже много где описан. Я хочу показать и подробно описать свою реализацию на конкретном микроконтроллере. Мне было необходимо принимать сигнал с пульта RGB — такого, как на картинке. Его система команд приведена внизу статьи.





 Наверное, нет человека, которого бы не раздражало, что самые важные пункты в договорах всегда пишутся «мелким шрифтом».
Наверное, нет человека, которого бы не раздражало, что самые важные пункты в договорах всегда пишутся «мелким шрифтом». 



 Все мы знаем, что большинство гаджетов дешевле купить в США, чем у нас на родине, и особенно это относится к различным новинкам, цены на которые у нас просто взлетают к небесам! Так же всем известно, что самые «вкусные» предложения на eBay и в интернет магазинах США обычно имеют доставку US only и соответственно не доступны для нас. В этой статье я попытаюсь рассказать про еще один способ исправить это недоразумение. Конечно все более-менее опытные интернет-покупатели знают о посредниках, которые предоставляют услугу mail forwarding — тоесть пересылку посылок. Происходит это так — вы заказываете доставку товара на адрес в США, который вам выдал посредник, он получает посылку и пересылает ее вам, беря за это небольшую комиссию. Известные посредники это Shipito, Ebaytoday, Бандеролька и т.д. их достаточно много и все они предлагают набор услуг — пересылка, объединение нескольких посылок в одну, наоборот — разделение крупной посылки на несколько мелких и тд. Берут обычно фиксированную плату за каждую посылку + оплату за дополнительные услуги. Стоимость самой пересылки обычно рассчитывается по тарифам USPS и этой же службой отправляют посылку вам. Я же хочу рассказать про еще одну компанию —
Все мы знаем, что большинство гаджетов дешевле купить в США, чем у нас на родине, и особенно это относится к различным новинкам, цены на которые у нас просто взлетают к небесам! Так же всем известно, что самые «вкусные» предложения на eBay и в интернет магазинах США обычно имеют доставку US only и соответственно не доступны для нас. В этой статье я попытаюсь рассказать про еще один способ исправить это недоразумение. Конечно все более-менее опытные интернет-покупатели знают о посредниках, которые предоставляют услугу mail forwarding — тоесть пересылку посылок. Происходит это так — вы заказываете доставку товара на адрес в США, который вам выдал посредник, он получает посылку и пересылает ее вам, беря за это небольшую комиссию. Известные посредники это Shipito, Ebaytoday, Бандеролька и т.д. их достаточно много и все они предлагают набор услуг — пересылка, объединение нескольких посылок в одну, наоборот — разделение крупной посылки на несколько мелких и тд. Берут обычно фиксированную плату за каждую посылку + оплату за дополнительные услуги. Стоимость самой пересылки обычно рассчитывается по тарифам USPS и этой же службой отправляют посылку вам. Я же хочу рассказать про еще одну компанию —