Предыстория
Хотелось создать своего робота, а так же автоматизировать управление светом и климатом дома. С этой целью начал изучать имеющиеся возможности. Для себя я разделил все решения на две группы: системы в которых код на контроллере выполняется в одном главном цикле (arduino, lego и т.п.) и системы состоящие из параллельно работающих процессов обменивающихся между собой сообщениями.
Интуитивно выбрал вторую группу, так как хотелось найти максимально простое решение с дружественным пользовательским интерфейсом. Из наиболее популярных представителей этого «семейства» очень понравились
Microsoft Robotics Studio и
ROS. Но к сожалению, на текущий момент, привязать их к конкретному железу весьма не просто, да и разобраться в них с нуля так же весьма не тривиальная задача. В итоге принял решение писать сам, но «кодить» на C очень не хотелось, Душа просила чего-нибудь попроще и полегче. В итоге выбрал Python. А учитывая, что по мимо робота и «умного дома» в голову начало лезть куча других идей, то решил сразу сделать небольшой фреймворк, в котором основной упор был бы сделан на простоту разработки.
Концепция
Концептуально фреймворк представляет собой набор поддерживаемых пользователем модулей реализующих различные функции робототехники. При работе Bubot строит сеть из процессов, которые могут асинхронно получать и отправлять сообщения между собой. Так же вы можете построить сеть из роботов, которые будут общаться между собой.
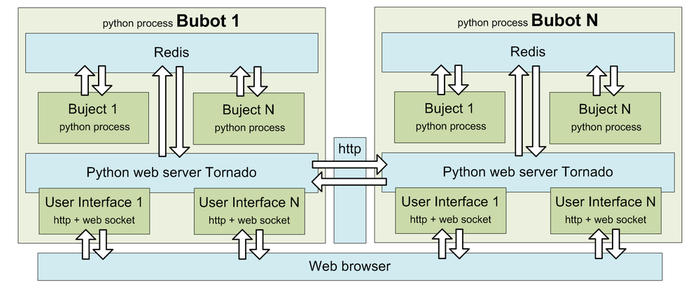
Сеть процессов строится на базе стандартного Python модуля multiprocessing. Система обмена сообщениями и разделяемая память реализованы при помощи
Redis.
Каждый Bubot имеет встроенный веб-сервер веб-сервер
Tornado, который позволяет контролировать состояние, управлять роботом, на ходу менять параметры (калибровать) робота, а также закладывается возможность обмена данными между роботами.
Bubot не является системой реального времени, хотя Bubot возможно интегрировать с кодом реального времени.
