Обычно к таким поделкам возникает два вопроса: «как?» и «для чего?» Первому вопросу посвящена сама публикация, а на второй я отвечу сразу:
Этот проект я затеял для того, чтобы освоить робототехнику, начиная с Raspberry Pi и камеры. Как известно, один из лучших способов чему-нибудь научиться — это придумать себе техзадание и попытаться его выполнить, по ходу получая необходимые навыки.
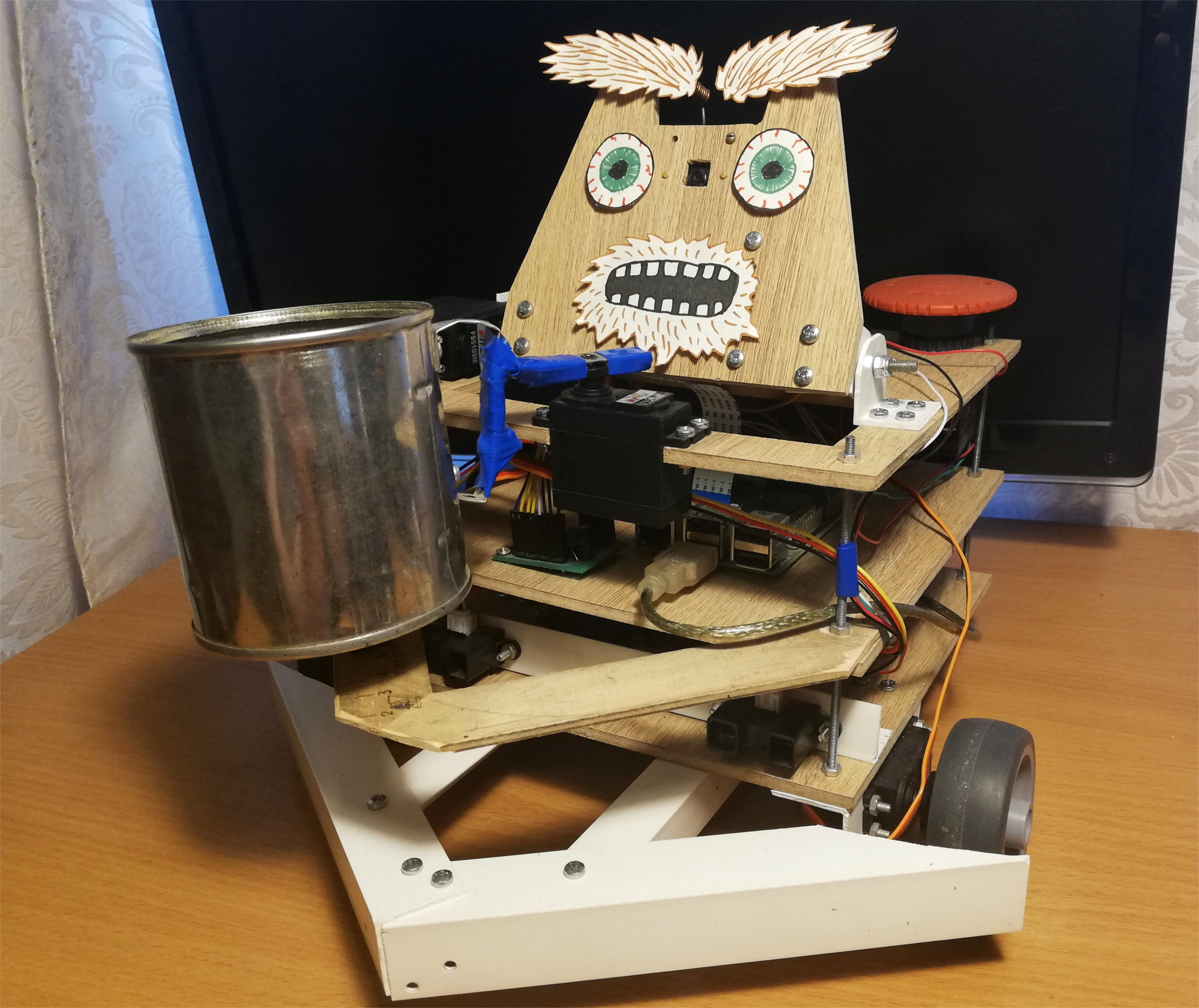
На тот момент у меня еще не было светлых идей в области робототехники, поэтому я решил сделать исключительно фановый проект — робота-попрошайку. В итоге получился автономный робот на Raspberry Pi и ROS, использующий Movidius Neural Cumpute Stick для обнаружения лиц. Он бродит по помещению, ищет людей, и трясет перед ними банкой. Вот как выглядит этот робот:
Этот проект я затеял для того, чтобы освоить робототехнику, начиная с Raspberry Pi и камеры. Как известно, один из лучших способов чему-нибудь научиться — это придумать себе техзадание и попытаться его выполнить, по ходу получая необходимые навыки.
На тот момент у меня еще не было светлых идей в области робототехники, поэтому я решил сделать исключительно фановый проект — робота-попрошайку. В итоге получился автономный робот на Raspberry Pi и ROS, использующий Movidius Neural Cumpute Stick для обнаружения лиц. Он бродит по помещению, ищет людей, и трясет перед ними банкой. Вот как выглядит этот робот: