Данная статья посвящена изучению принципов и практической реализации технологии обнаружения и определения дальности с помощью активных оптических систем (LIDAR)
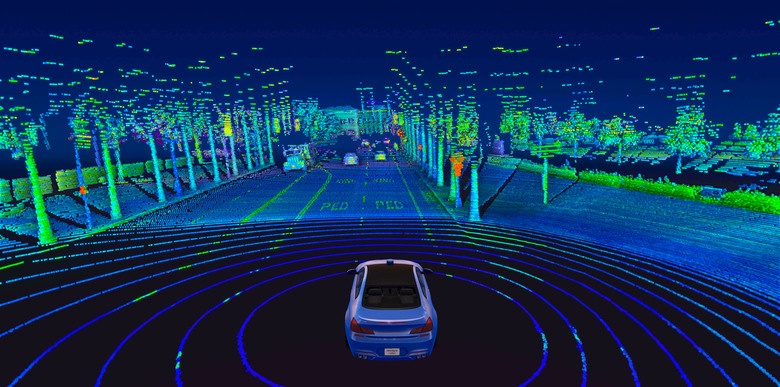
LIDAR – Light Detection and Ranging – технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, применяющих явления поглощения и рассеяния света в оптически прозрачных средах.
На сегодняшний день оптические локационные системы являются наиболее распространёнными системами, привлекающих к себе внимание учёных и практиков как инструменты, обеспечивающие максимальную информативность и точность при наблюдениях и дистанционных измерениях.
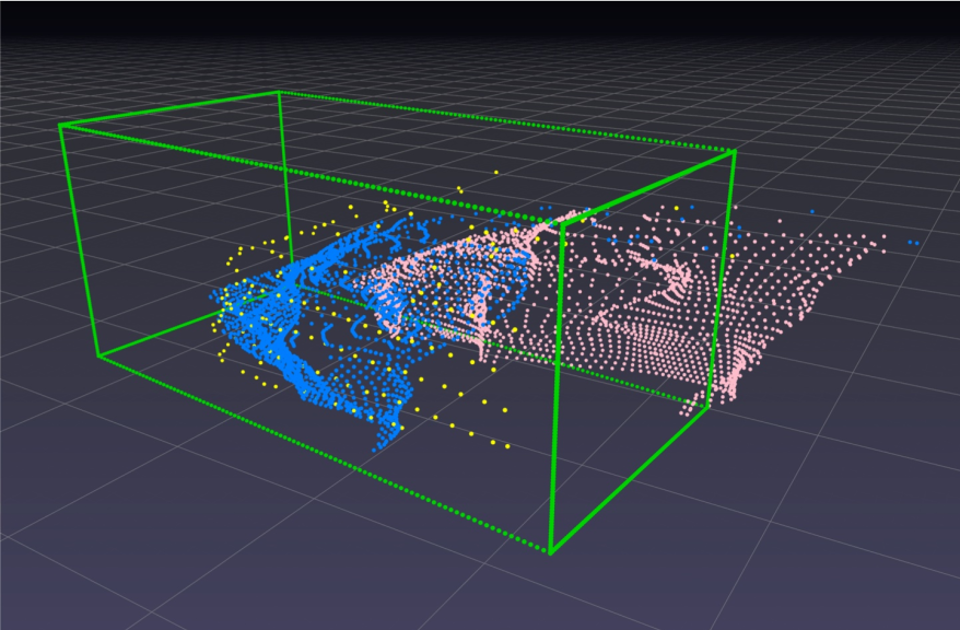
Оптическая локация, представляет собой совокупность методов обнаружения, измерения координат, а также распознавания формы удалённых объектов с помощью электромагнитных волн оптического диапазона. Одной из известных оптических локационных систем является технология LIDAR.
Целью статьи является, исследование различных областей применения оптических локационных систем, более глубокое познание в их использовании, огромнейшая ценность этих систем в наше время, их дальнейшие тенденции и возможности развития. А также статья направлена на выявление современной и актуальной технологии, работающей на основе оптических локационных систем.
Технология LIDAR
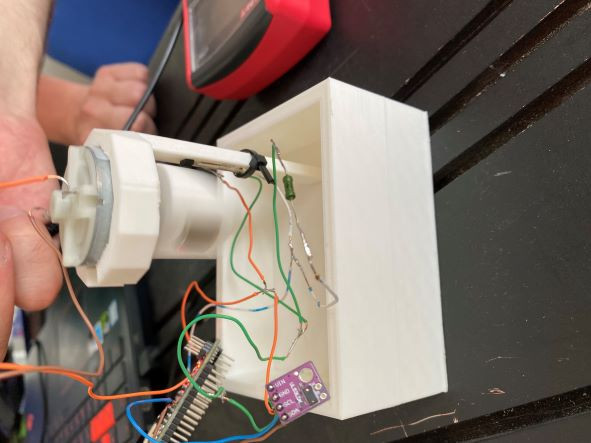
Лидары – лазерные локационные оптико-электронные системы (ОЭС) активного типа, предназначенные для активного дистанционного зондирования окружающей среды с целью получения информации для решения научных, производственных, экологических и метрологических задач.