Итак, дамы и господа, мы с вами дожили до момента, когда злой ученый может позволить себе создать армию чудовищных роботов-убийц, несущих ужас и разрушения. Уничтожением человечества я займусь позже, а сейчас попробую теоретически доказать возможность создания довольно резвого двуногого шасси для робота-бипеда.

Что бы я хотел получить? Меня бы устроило шасси массой около 1 кг, с конечностями, состоящими из двух «костей» длинной 5 см каждая. Неплохо было бы вращать ногами со скоростью 2 об/с, ведь бегающий монстр вселяет больше ужаса. Важно максимально облегчить ноги, так как их движение во время ходьбы будет нарушать равновесие. В конечностях наибольший вес имеют двигатели, значит, мы разместим за пределами ног.
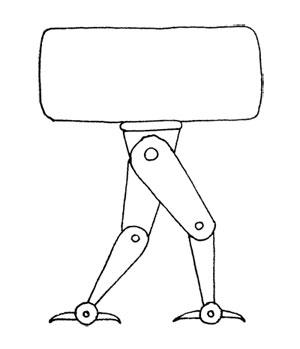
Получилось нечто похожее на страуса. Не так уж и ужасно, надо бы потом над этим поработать.

Теперь придется немного посчитать, пусть даже приблизительно.
Каждая часть ноги длинной 5 см должна выдержать вес всего шасси – 10 Н (при массе 1 кг на планете Земля). Необходимый момент силы будет произведением длины рычага на силу, приложенную к его концу:
T = L · F;
T = 0.05 м · 10 Н = 0.5 Нм,
где T – момент силы, L – длина рычага, F – приложенная сила.
Надо бы подобрать двигатель. Идеальным вариантом будут безколлекторные двигатели, используемые в моделях электрических самолетов. Они мало весят, развивают большую мощность и имеют высокий КПД. Минимальная мощность двигателя P равна произведению момента силы T рычага на угловую скорость вращения V его же:
P = T · 2pi · V;
P = 0.5 Нм · 6.2832 · 2 об/сек = 6.2832 Вт,
где P – мощность двигателя, V – угловая скорость.
Ээээ… Ну не надо мелочиться, мощности в 12 Вт будет достаточно. Достойно будет смотреться двигатель вроде Hacker A10-15S (никакой рекламы, первый попавшийся на глаза двигатель).

Характеристики:
U = 7 В; I = 4.6 А; RPM = 11270 об/мин; P = 33 Вт.
Неплохо бы узнать момент двигателя…
T = P / ( 2pi · V );
T = 33 Вт / (6.2832 · 187.8 об/сек ) = 0.028 Нм,
где T – момент силы, P – мощность двигателя, V – угловая скорость.
… а также параметры редуктора, вспомнив, что нога должна иметь момент Tвых в 0.5 Нм при угловой скорости Vвых в 2 об/сек, а двигатель дает 11270… ну ладно, 10000 об/мин:
Tвх · Vвх = Tвых · Vвых;
Tвх = ( Tвых · Vвых ) / Vвх;
Tвх = ( 0.5 Нм · 2 об/сек ) / 166 об/сек = 0.006 Нм,
где Tвх и Tвых – моменты на входе и выходе редуктора, Vвх и Vвых – соответственно, обороты.
Передаточное число редуктора N:
N = Vвх: Vвых;
N = 166: 2 = 83: 1,
где N – передаточное число, Vвх и Vвых – обороты на входе и выходе.
Появился и запас мощности, даже если КПД редуктора – 50%:
( 0.028 Нм · 0.5 ): 0.006 Нм
0.014 Нм: 0.006 Нм
2.33: 1
К тому же из-за того, что ноги располагаются почти параллельно с вектором силы тяжести G, на движение будет расходоваться меньше энергии. К примеру, для перпендикуляра между ногой и вектором G необходимо потратить 100% мощности, а для угла в 30 градусов – не более 50%.
Самое время прикинуть на бумажном носителе механику ноги. Порывшись в старых книгах, я нашел то, что необходимо – конические зубчатые передачи в шарнирах и трубчатые валы. Для данного случая это выглядит примерно так:
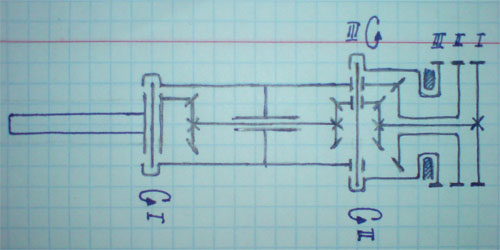
Понадобится по одному двигателю для шарниров I и II на каждую ногу. Должно хватить одного двигателя на оба шарнира III, ведь нагрузки там слабее. Всего пять.
Для питания отлично подходят LiPo аккумуляторы для авиамоделирования. Они легки, имеют достаточную емкость и могут отдавать огромные токи. Попался на глаза аккумулятор неизвестного производителя напряжением 7.4 В и емкостью 2200 мАч, который может отдавать ток до 22 А. Уже звучит ужасающе. Двигатели жрут немало, а именно 23А совместными усилиями. Во время пиковых мощностей эти монстры будут еще прожорливей, поэтому одним аккумулятором не обойтись. Возьмем три. Заряд в 6600 мАч при номинальной нагрузке и не самых лучших условиях продержится минут пятнадцать.
Теперь посчитать бы, сколько весят потроха творца апокалипсиса:
– масса двигателя равна 15 г, в сумме будет 75 г;
– масса аккумулятора не превышает 110 г, трех штук – 330 г;
– для редуктора хватит 70 г, для пяти – 350 г;
– электроника вместится в 45 г;
– само шасси, способное выдержать необходимые перегрузки не должно оказаться тяжелее 200 г.
Итого: 75 + 330 + 350 + 45 + 200 = 1000 г
Также надо добавить много-много-много денег и производственных ресурсов.

Что бы я хотел получить? Меня бы устроило шасси массой около 1 кг, с конечностями, состоящими из двух «костей» длинной 5 см каждая. Неплохо было бы вращать ногами со скоростью 2 об/с, ведь бегающий монстр вселяет больше ужаса. Важно максимально облегчить ноги, так как их движение во время ходьбы будет нарушать равновесие. В конечностях наибольший вес имеют двигатели, значит, мы разместим за пределами ног.
Получилось нечто похожее на страуса. Не так уж и ужасно, надо бы потом над этим поработать.
Теперь придется немного посчитать, пусть даже приблизительно.
Каждая часть ноги длинной 5 см должна выдержать вес всего шасси – 10 Н (при массе 1 кг на планете Земля). Необходимый момент силы будет произведением длины рычага на силу, приложенную к его концу:
T = L · F;
T = 0.05 м · 10 Н = 0.5 Нм,
где T – момент силы, L – длина рычага, F – приложенная сила.
Надо бы подобрать двигатель. Идеальным вариантом будут безколлекторные двигатели, используемые в моделях электрических самолетов. Они мало весят, развивают большую мощность и имеют высокий КПД. Минимальная мощность двигателя P равна произведению момента силы T рычага на угловую скорость вращения V его же:
P = T · 2pi · V;
P = 0.5 Нм · 6.2832 · 2 об/сек = 6.2832 Вт,
где P – мощность двигателя, V – угловая скорость.
Ээээ… Ну не надо мелочиться, мощности в 12 Вт будет достаточно. Достойно будет смотреться двигатель вроде Hacker A10-15S (никакой рекламы, первый попавшийся на глаза двигатель).
Характеристики:
U = 7 В; I = 4.6 А; RPM = 11270 об/мин; P = 33 Вт.
Неплохо бы узнать момент двигателя…
T = P / ( 2pi · V );
T = 33 Вт / (6.2832 · 187.8 об/сек ) = 0.028 Нм,
где T – момент силы, P – мощность двигателя, V – угловая скорость.
… а также параметры редуктора, вспомнив, что нога должна иметь момент Tвых в 0.5 Нм при угловой скорости Vвых в 2 об/сек, а двигатель дает 11270… ну ладно, 10000 об/мин:
Tвх · Vвх = Tвых · Vвых;
Tвх = ( Tвых · Vвых ) / Vвх;
Tвх = ( 0.5 Нм · 2 об/сек ) / 166 об/сек = 0.006 Нм,
где Tвх и Tвых – моменты на входе и выходе редуктора, Vвх и Vвых – соответственно, обороты.
Передаточное число редуктора N:
N = Vвх: Vвых;
N = 166: 2 = 83: 1,
где N – передаточное число, Vвх и Vвых – обороты на входе и выходе.
Появился и запас мощности, даже если КПД редуктора – 50%:
( 0.028 Нм · 0.5 ): 0.006 Нм
0.014 Нм: 0.006 Нм
2.33: 1
К тому же из-за того, что ноги располагаются почти параллельно с вектором силы тяжести G, на движение будет расходоваться меньше энергии. К примеру, для перпендикуляра между ногой и вектором G необходимо потратить 100% мощности, а для угла в 30 градусов – не более 50%.
Самое время прикинуть на бумажном носителе механику ноги. Порывшись в старых книгах, я нашел то, что необходимо – конические зубчатые передачи в шарнирах и трубчатые валы. Для данного случая это выглядит примерно так:
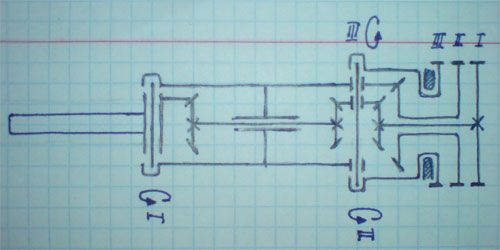
Понадобится по одному двигателю для шарниров I и II на каждую ногу. Должно хватить одного двигателя на оба шарнира III, ведь нагрузки там слабее. Всего пять.
Для питания отлично подходят LiPo аккумуляторы для авиамоделирования. Они легки, имеют достаточную емкость и могут отдавать огромные токи. Попался на глаза аккумулятор неизвестного производителя напряжением 7.4 В и емкостью 2200 мАч, который может отдавать ток до 22 А. Уже звучит ужасающе. Двигатели жрут немало, а именно 23А совместными усилиями. Во время пиковых мощностей эти монстры будут еще прожорливей, поэтому одним аккумулятором не обойтись. Возьмем три. Заряд в 6600 мАч при номинальной нагрузке и не самых лучших условиях продержится минут пятнадцать.
Теперь посчитать бы, сколько весят потроха творца апокалипсиса:
– масса двигателя равна 15 г, в сумме будет 75 г;
– масса аккумулятора не превышает 110 г, трех штук – 330 г;
– для редуктора хватит 70 г, для пяти – 350 г;
– электроника вместится в 45 г;
– само шасси, способное выдержать необходимые перегрузки не должно оказаться тяжелее 200 г.
Итого: 75 + 330 + 350 + 45 + 200 = 1000 г
Также надо добавить много-много-много денег и производственных ресурсов.
