Добрый день! Как известно дороги в России далеко не самые лучшие и поэтому до сих пор актуальна разработка и программирование блоков активной подвески автомобилей, адаптирующихся под тип дорожного покрытия выбором режима работы или алгоритма.
Приведу ряд электрических схем и рекомендаций.
Для начала нужно определиться с выбором типа микропроцессора — микроконтроллера. Советую выбирать современный быстрый 32-х разрядный микроконтроллер STM или подобный — оптимальный вариант фирмы Infineon.

Одно из важнейших факторов и залога надежности работы схемы — правильное проектирование источника питания и обвязки. Советую использовать многоканальные LDO-регуляторы в микропроцессорном исполнении с последовательно шиной SPI для управления режимами питания, аварийном выключении и мониторингом (Power good).
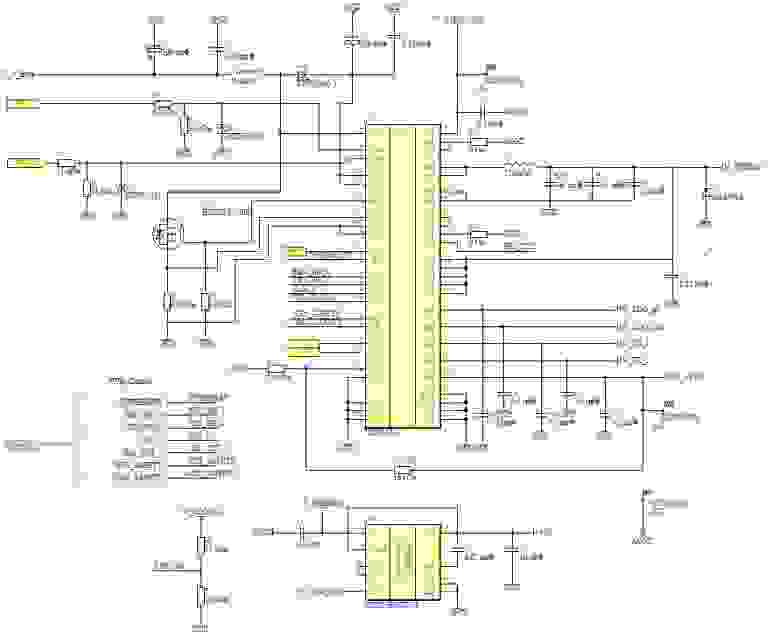
Далее переходим к разработке «силовой части». Проектируем схему управления упругими элементами — демпферами:
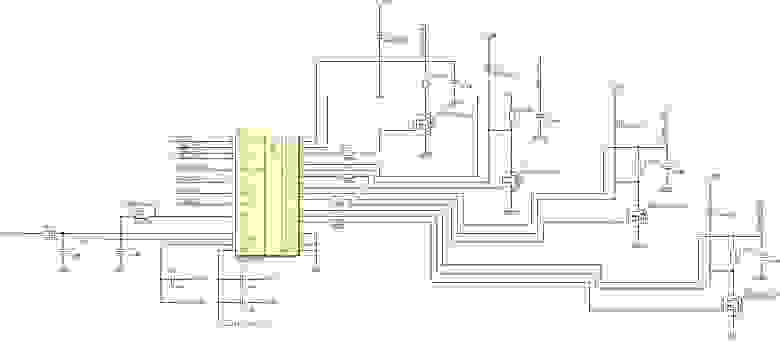
Лучше выбирать специализированные микросхемы, сертифицированные для автомобильной отрасли, например, TLE7242 Infineon. Она содержит цепи контроля MOSFET по перегрузке выходных цепей Drain-Source.
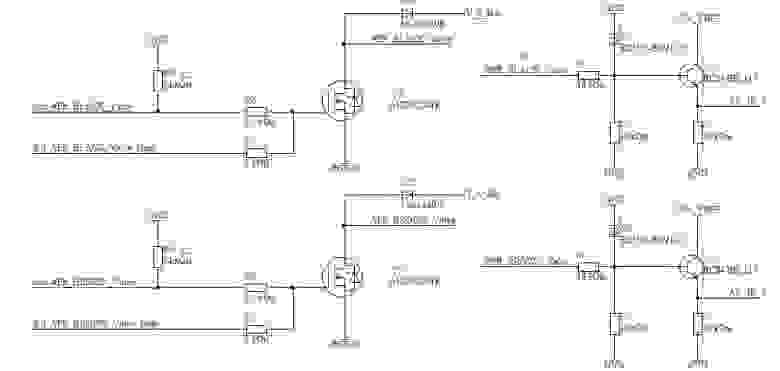
Для клапанов управления воздушным насосом следует применять интеллектуальные ключи со встроенной защитой от превышения температуры, короткого замыкания нагрузки, перенапряжения:

и клапаны воздушного насоса Air_Valve_Pump:
После проектирования «силовой части» переходим к разработке электрических схем для подключения датчиков ускорения. Выбираем протокол последовательной передачи данных по интерфейсу I2C в силу сравнительной простоты программирования, двухпроводной линии и невысокой частоте передачи информации. Обязательно делаем защиту от входного напряжения бортсети +12В и переполюсовке подтяжкой к цепям питания +5В, +12В и TVS-диодом. Я использовал мультиплексоры фирмы Analog Devices для последовательного переключения каналов:
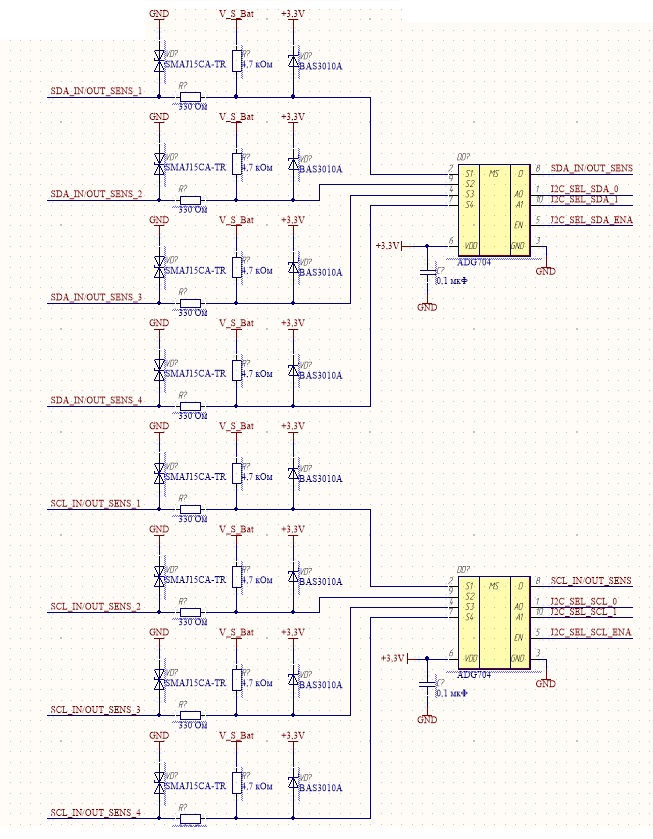
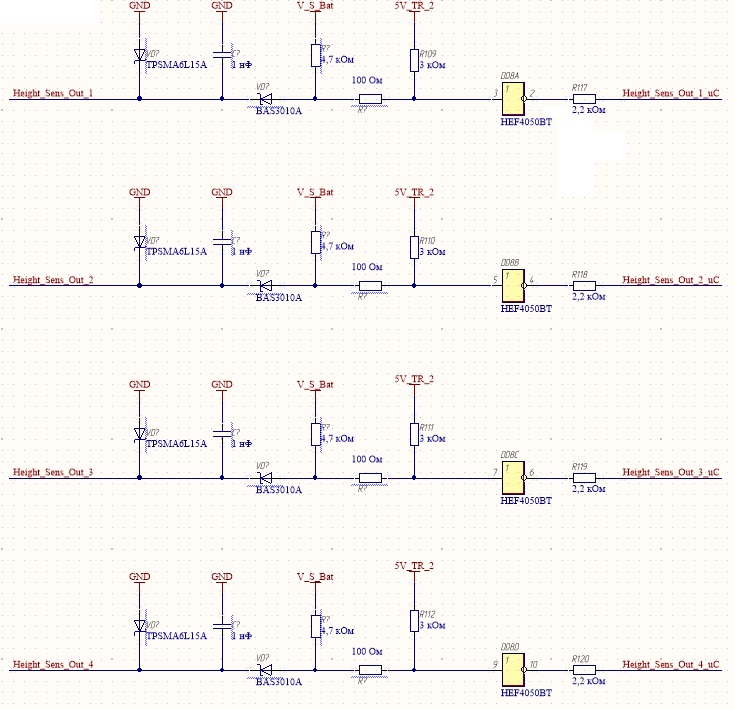
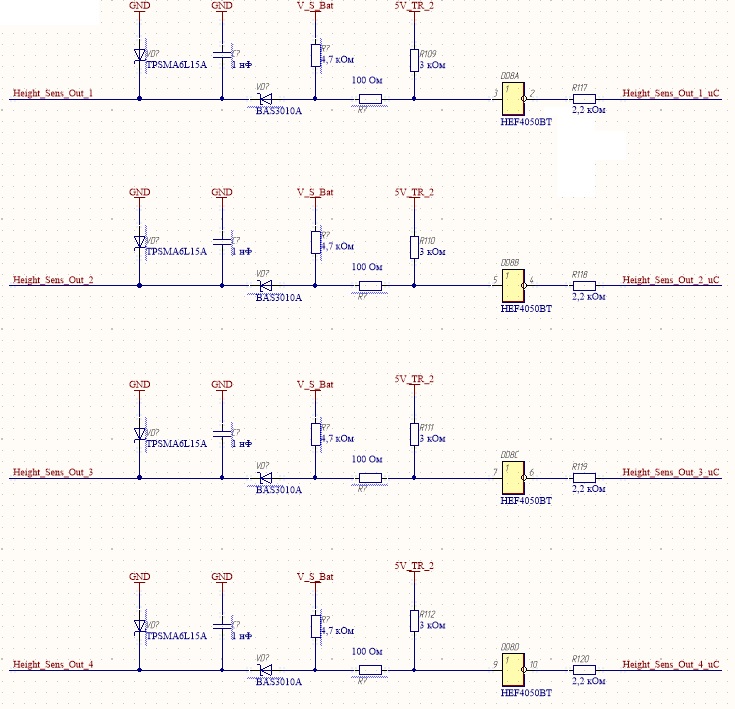
Схема подключения датчиков высоты довольно проста, микроконтроллер считывает информацию на выводах I/O по переднему фронту:
Для настройки и калибровки блока используются два независимых CAN-приемопередатчика, выполненных на микросхемах TLE6250 со встроенной защитой от ESD. В качестве защиты дифференциальной линии передачи дополнительно установил супрессоры PESD2CAN.
Немного слов о программировании блока. Исходный код пишется на языке С для коммуникации узлов на низком уровне и протоколов обмена: SPI, I2C, CAN. Для управления блоком с верхнего уровня основные переменные транслируются программой MatLab&Simulink через С компилятор и встроенные функции математического пакета.
Приведу ряд электрических схем и рекомендаций.
Для начала нужно определиться с выбором типа микропроцессора — микроконтроллера. Советую выбирать современный быстрый 32-х разрядный микроконтроллер STM или подобный — оптимальный вариант фирмы Infineon.

Одно из важнейших факторов и залога надежности работы схемы — правильное проектирование источника питания и обвязки. Советую использовать многоканальные LDO-регуляторы в микропроцессорном исполнении с последовательно шиной SPI для управления режимами питания, аварийном выключении и мониторингом (Power good).

Далее переходим к разработке «силовой части». Проектируем схему управления упругими элементами — демпферами:
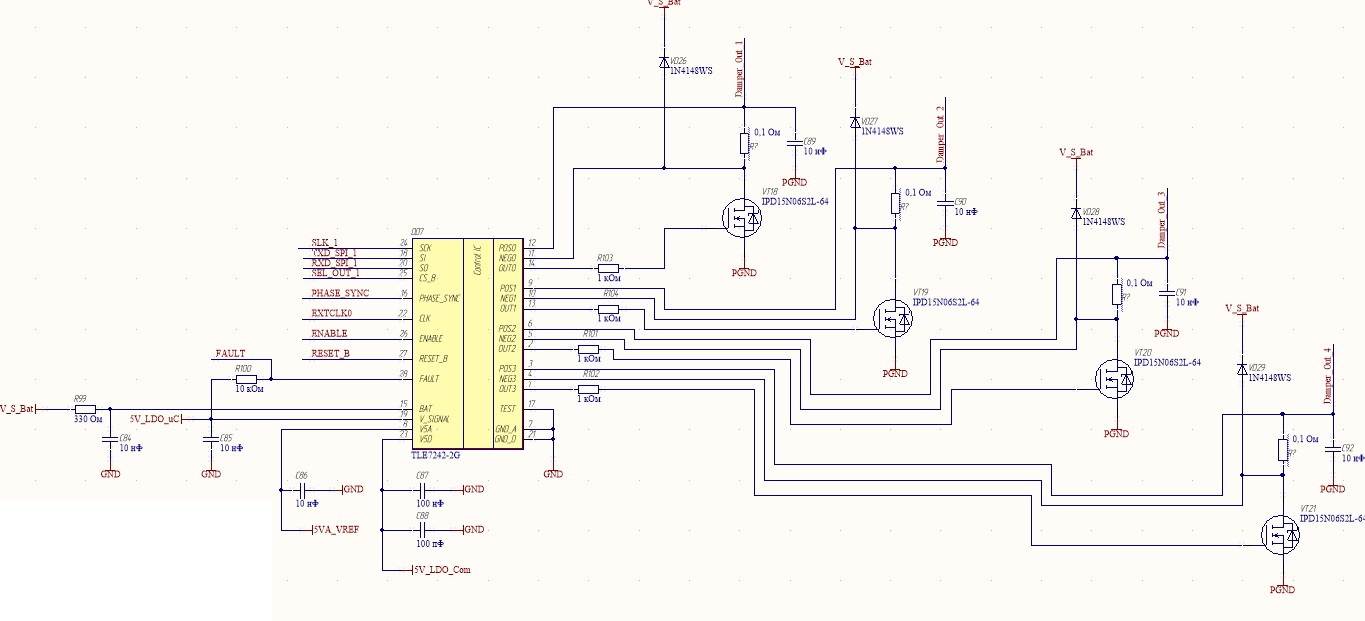
Лучше выбирать специализированные микросхемы, сертифицированные для автомобильной отрасли, например, TLE7242 Infineon. Она содержит цепи контроля MOSFET по перегрузке выходных цепей Drain-Source.
Для клапанов управления воздушным насосом следует применять интеллектуальные ключи со встроенной защитой от превышения температуры, короткого замыкания нагрузки, перенапряжения:
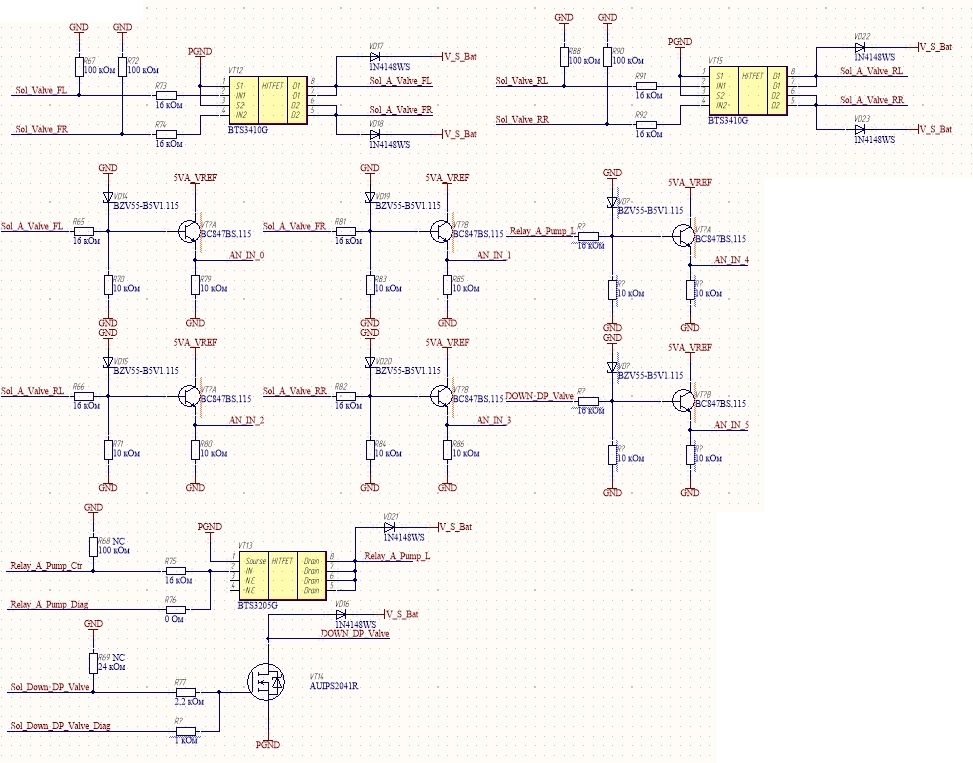
и клапаны воздушного насоса Air_Valve_Pump:

После проектирования «силовой части» переходим к разработке электрических схем для подключения датчиков ускорения. Выбираем протокол последовательной передачи данных по интерфейсу I2C в силу сравнительной простоты программирования, двухпроводной линии и невысокой частоте передачи информации. Обязательно делаем защиту от входного напряжения бортсети +12В и переполюсовке подтяжкой к цепям питания +5В, +12В и TVS-диодом. Я использовал мультиплексоры фирмы Analog Devices для последовательного переключения каналов:

Схема подключения датчиков высоты довольно проста, микроконтроллер считывает информацию на выводах I/O по переднему фронту:
Для настройки и калибровки блока используются два независимых CAN-приемопередатчика, выполненных на микросхемах TLE6250 со встроенной защитой от ESD. В качестве защиты дифференциальной линии передачи дополнительно установил супрессоры PESD2CAN.
Немного слов о программировании блока. Исходный код пишется на языке С для коммуникации узлов на низком уровне и протоколов обмена: SPI, I2C, CAN. Для управления блоком с верхнего уровня основные переменные транслируются программой MatLab&Simulink через С компилятор и встроенные функции математического пакета.
