Comments 40
Интересно, как скоро появятся 3d сканы лиц клиентов банка с привязкой к их паспортным данным? Прям представляю картину из ближайшего будущего: «Над спящем человеком в общественном транспорте склоняется нехороший человек с портативным сканером в руках размером со смартфон и пару раз махнув над лицом бедолаги ухмыляясь скрывается в темноте».
Это да. Когда сегодня внедряют биометрию (голос, лицо) понятно, что сегодня их снять не так просто. А завтра?
Помнится, недавно сняли отпечаток пальца с качественной фотографии министра обороны Германии. Т.е. достаточно рукой помахать, как к твоему смартфону получат доступ. С формой лица и того проще, оно вообще редко скрыто… (разве что на востоке при использовании паранджи))).
Помнится, недавно сняли отпечаток пальца с качественной фотографии министра обороны Германии. Т.е. достаточно рукой помахать, как к твоему смартфону получат доступ. С формой лица и того проще, оно вообще редко скрыто… (разве что на востоке при использовании паранджи))).
Про отпечатки пальцев кстати вопрос: мы же держим телефон в руках, по идее на нем должно быть дофига отпечатков. Т.е. если мы украли телефон, у нас есть немного этого порошка для проявления отпечатков, который используют криминалисты, то мы легко отпечатки хозяина с него можем снять и разблокировать его. Пробовал так кто-нибудь?
Я склоняюсь к мысли, что не надо в принципе использовать методы аутентификации независимые от сознания. Если будут бить и требовать пароль — все же есть шансы гм… потерпеть и избежать бОльших проблем. А если будут нежно держать и поочередно прикладывать пальчики к телефону, то… Хотя наверняка текомуестьчтоскрывать об этом в курсе.
Впрочем для безопасности в другую сторону — типа доступ на объекты — биометрия видимо лучше. Пока еще чужую радужку принес собой труднее чем пароль.
Впрочем для безопасности в другую сторону — типа доступ на объекты — биометрия видимо лучше. Пока еще чужую радужку принес собой труднее чем пароль.
Я вообще считаю что отпечатки пальцев и лицо нельзя считать аутентификационными данными. Это публичные идентификационные данные. Т.е. лицо и «пальчики» — это как логин на хабре. А вот для аутентификации нужно предъявить то, что просто так «подсмотреть» нельзя — пароль, код из TOTP-приложения и прочие факторы.
Да, помню на YouTube видео где именно таким способом взламывался TouchID. Есть определенные трудности – имитация пальца должна обладать некоторыми свойствами живого пальца (по-моему электропроводимостью), но это легко обходится.
Кстати, именно по-этой причине вы не можете авторизовывать некоторые действия на телефоне с помощью TouchID/FaceID (например нельзя отвязать iCloud или выключить FindMyIphone) – прийдется вводить passcode или пароль от учетной записи.
Тем не менее, в повседневной жизни TouchID/FaceID надежнее пароля, потому что ваш пароль тривиально подсмотреть через плечо во время набора. Во всяком случае явно проще чем подделывать отпечатки или печатать на 3d принтере ваше лицо. Так что TouchID/FaceID – не самодостаточный способ авторизации, а скорее метод защиты вашего passcode и пароля от утечки в окружении посторонних глаз.
Кстати, именно по-этой причине вы не можете авторизовывать некоторые действия на телефоне с помощью TouchID/FaceID (например нельзя отвязать iCloud или выключить FindMyIphone) – прийдется вводить passcode или пароль от учетной записи.
Тем не менее, в повседневной жизни TouchID/FaceID надежнее пароля, потому что ваш пароль тривиально подсмотреть через плечо во время набора. Во всяком случае явно проще чем подделывать отпечатки или печатать на 3d принтере ваше лицо. Так что TouchID/FaceID – не самодостаточный способ авторизации, а скорее метод защиты вашего passcode и пароля от утечки в окружении посторонних глаз.
Именно. Причем завтра фронтальная камера глубины будет снимать видео и телефон будет просить вас улыбнуться. И маски отвалятся, поскольку напечатать улыбающуюся (как вы) маску — совсем уж нетривиальная задача.
Биометрия как метод аутентификации имеет смысл только в случае явного подтверждения факта участия тестируемого в самом процессе аутентификации.
То есть если банковский сотрудник сканирует ваше лицо, или миграционный служащий просит приложить палец к сканеру – это ок, потому что именно они подтверждают факт вашего личного присутствия и сознательного участия в процессе аутентификации, чтобы не было потом «он помахал чем-то похожим на голову человека перед камерой и дверь открылась».
То есть если банковский сотрудник сканирует ваше лицо, или миграционный служащий просит приложить палец к сканеру – это ок, потому что именно они подтверждают факт вашего личного присутствия и сознательного участия в процессе аутентификации, чтобы не было потом «он помахал чем-то похожим на голову человека перед камерой и дверь открылась».
Компания Artec делает 3Д камеры с прицелом на СКУД. Вокорд активно развивало 3д распознавание по стерео, и теперь их купила Huawei. Весьма вероятно что новые банкоматы будут оснащаться либо стерео-камерами, либо сразу depth сенсорами, и тогда начнут снимать и 3д биометрию. Деталей не знаю, но скорее всего в национальной биометрической платформе такая форма биометрии, как 3д лица, тоже предусмотрена.
Ничего не мешает это сделать сейчас, я записываю объекты на видео со всех сторон разбиваю на кадры и загружаю в meshroom для получения 3D моделей, занимает много времени, особенно если слабый пк но не больше 3 часов в среднем.
Вот последняя модель которую я получил таким способом (ссылка на sketchfab), сканирование заняло 10 секунд (обойти вокруг объекта с телефоном) Генерация меша — 1 час на среднем ноуте(1050ti core i7 7700).
я записываю объекты на видео со всех сторон разбиваю на кадры и загружаю в meshroom… если слабый пк… не больше 3 часов в среднем.А теперь представьте, что все то же самое можно будет сделать не за 3 часа, а в реальном времени и не на мощном компе, а на среднем телефоне.
Причем снять можно будет и человека и алгоритм «простит» небольшие его движения (человек, а особенно ребенок не может стоять полностью неподвижно).
Т.е. ситуация лучше и количественно, и качественно.
А так — да, конечно можно. Фотограмметрии уже 180 лет примерно ))) И она тоже развивается, правда не столь бурно.
UFO just landed and posted this here
Надеюсь в скором будущем появятся дешевые решения с точностью 1-2 мм на расстоянии до 500м, построенные на основе камер глубины, для строительной отрасли в частности геодезии. Нынешние решения по сканированию стоят заоблачно например: Leica или Sokkia
У меня камера Intel D435, типа XBox 360, вот так видит — https://www.youtube.com/watch?v=hYccKNKFAWU
Очень интересно. С нетерпением жду продолжения!
Хабр все еще торт! Спасибо за статью.
Ничего в этом не понимаю, но очень круто и интересно, жду второй части!
Прогресс это всегда так захватывающе :)
Прогресс это всегда так захватывающе :)
Дмитрий, спасибо за чудесный обзор! Собираю подобный материал для реализации своего проекта. И у вас прям шквал информации и новинок! Рассказывайте ещё.
А что по поводу ультразвуковых MEMS матриц? Они тоже рванули в жизнь за последние 3-5 лет. Дальность от ближнего поля в сенсорах отпечатков пальцев до 5-50 м для автонавигации. Строят 3Д картинки на уровне времяпролётных камер ToF. Опять же, солнце – не помеха. Есть по этому поводу какие-то комментарии?

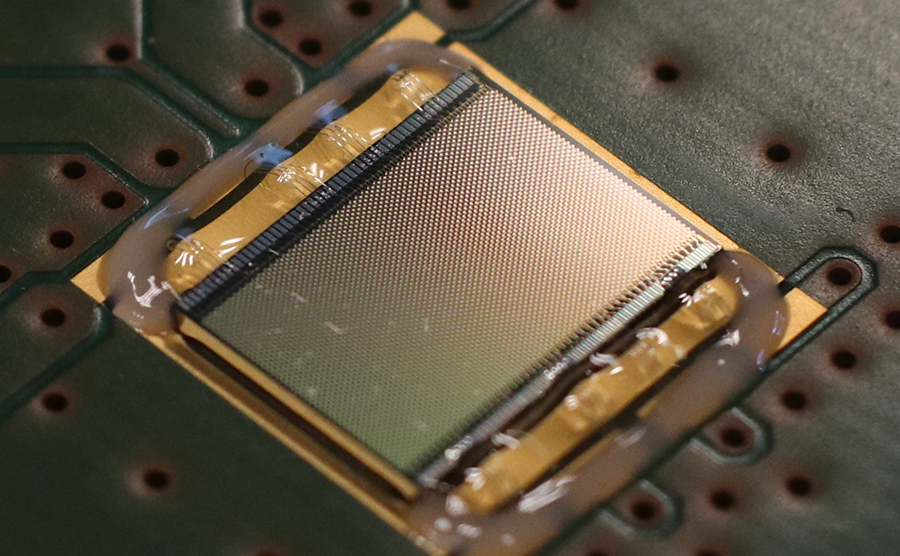
Филипс CMUT/PMUT на 1-40 МГц
А что по поводу ультразвуковых MEMS матриц? Они тоже рванули в жизнь за последние 3-5 лет. Дальность от ближнего поля в сенсорах отпечатков пальцев до 5-50 м для автонавигации. Строят 3Д картинки на уровне времяпролётных камер ToF. Опять же, солнце – не помеха. Есть по этому поводу какие-то комментарии?


Филипс CMUT/PMUT на 1-40 МГц
Строят 3Д картинки на уровне времяпролётных камер ToF.Честно говоря такого не встречал. А можно примеры картинок/видео?
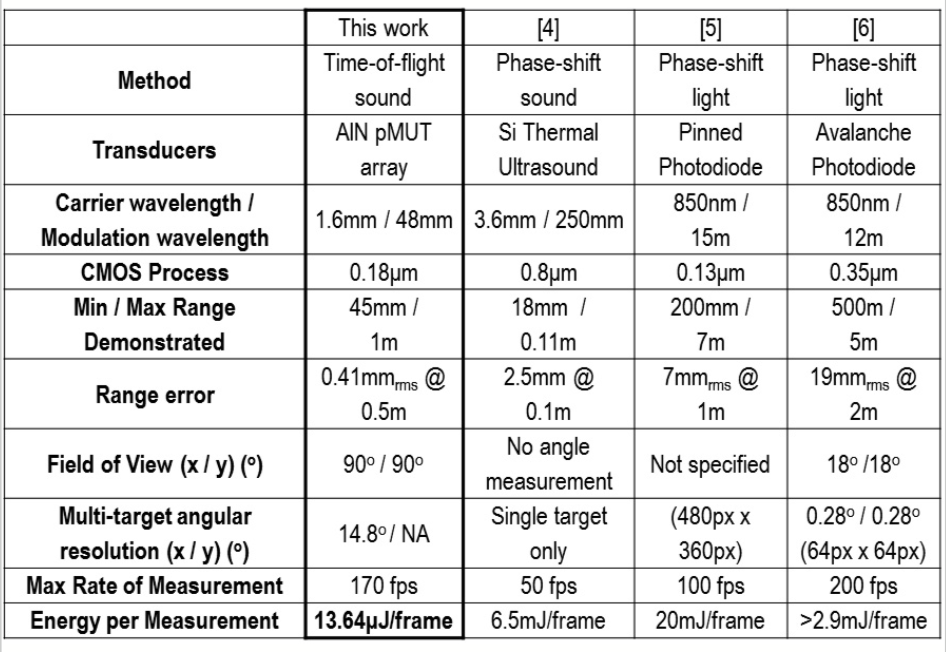
Есть немного – 1 (ниже табличка из этой статьи), 2, 3 (один из вариантов — построение 3D из акустических 2D), 4, 5 — по русски на Хабре.
На ToF построены любые сонары. Раньше их изготавливали нарезкой одиночных пьзокристалов, поэтому или точечные с механикой (автомобильные или глубинные), или дорогие в матричных сенсорах (УЗИ). Сейчас научились делать MEMS+CMOS и это резко снижает цену сенсора.
На ToF построены любые сонары. Раньше их изготавливали нарезкой одиночных пьзокристалов, поэтому или точечные с механикой (автомобильные или глубинные), или дорогие в матричных сенсорах (УЗИ). Сейчас научились делать MEMS+CMOS и это резко снижает цену сенсора.

Спасибо за отличные ссылки!
Первая — наиболее интересная (хотя и короткая). Я не физик и там если в воде (или организме) ультразвук работает неплохо, то в воздухе — все как-то похуже. В частности, даже в [1] хотя и заявляют 90 на 90 градусов, но разрешение дают в 14.8 градусов по одному измерению. И картинка только в одном измерении в примере. Т.е. похоже, первое слабое место — это разрешение на воздухе. А второе — это дистанция. Заявляется 1 метр максимально. При этом ToF на инфракрасном свете до 10 метров вполне дают.
С третье стороны — источник 2014 года, причем очень короткий. И, кстати, эти 3 страницы неплохо цитируются scholar.google.ru/scholar?cites=10762011133762124529 — вижу 52 цитирующих статьи.
Среди них нашел работу посвежее: магистерскую диссертацию «Ultrasound 3D Gesture Recognition» scholar.sun.ac.za/handle/10019.1/103697 — но там тоже с картинками плохо, хотя в целом работа большая и подробная и при наличии времени есть куда вкуривать.
scholar.sun.ac.za/handle/10019.1/103697 — тут тоже сравниваются с ультразвуковыми, но старыми…
Первая — наиболее интересная (хотя и короткая). Я не физик и там если в воде (или организме) ультразвук работает неплохо, то в воздухе — все как-то похуже. В частности, даже в [1] хотя и заявляют 90 на 90 градусов, но разрешение дают в 14.8 градусов по одному измерению. И картинка только в одном измерении в примере. Т.е. похоже, первое слабое место — это разрешение на воздухе. А второе — это дистанция. Заявляется 1 метр максимально. При этом ToF на инфракрасном свете до 10 метров вполне дают.
С третье стороны — источник 2014 года, причем очень короткий. И, кстати, эти 3 страницы неплохо цитируются scholar.google.ru/scholar?cites=10762011133762124529 — вижу 52 цитирующих статьи.
Среди них нашел работу посвежее: магистерскую диссертацию «Ultrasound 3D Gesture Recognition» scholar.sun.ac.za/handle/10019.1/103697 — но там тоже с картинками плохо, хотя в целом работа большая и подробная и при наличии времени есть куда вкуривать.
scholar.sun.ac.za/handle/10019.1/103697 — тут тоже сравниваются с ультразвуковыми, но старыми…
У меня есть гипотеза, что недоработка в воздушных сонарах – из-за развитости радиолокации и цифровых фото/видео сенсоров. Плюс непроработанность темы звуковых линз – они хорошо развиты в аппаратах УЗИ и немного в топовой музыкальной акустике.
Или вот ещё тема для размышлений – парктроники большей частью на ультразвуке работают, а для автопилотов предпочитают ставить лидары с механической развёрткой и обычные видеокамеры.
Я пробую сонары, потому что понециально они более энергоэффективны. Для wearables и IoT – это важнее всего. К тому же в природе сонары распространены как в воде (дельфины), так и в воздухе (летучие мыши). И это обнадёживает))
Или вот ещё тема для размышлений – парктроники большей частью на ультразвуке работают, а для автопилотов предпочитают ставить лидары с механической развёрткой и обычные видеокамеры.
Я пробую сонары, потому что понециально они более энергоэффективны. Для wearables и IoT – это важнее всего. К тому же в природе сонары распространены как в воде (дельфины), так и в воздухе (летучие мыши). И это обнадёживает))
Выше на бегу писал с глюками, сорри!
А так — ход мысли в этом направлении, похоже, не только у вас:
«A 137-μW Area-Efficient Real-Time Gesture Recognition System for Smart Wearable Devices» ieeexplore.ieee.org/abstract/document/8579256 — прошлогодняя статья.
Парктроники — это все-таки одноканальный сенсор, т.е. просто расстояние. Проблемы разрешения в нем нет, ну и тоже — типа хорошая работа на расстояние около метра. Т.е. строго в рамках предыдущих ограничений кейс. Насколько звуковые линзы будут дешевы для них? Хороший вопрос…
По лидарам будет в следующей части, там прорыв на прорыве зреют просто потому, что по точности им нет равных на больших дистанциях. Как следствие — сейчас (как только начнут массово ставить) будет кардинальное снижение цены. Примерно, как в мобильных камерах глубины произошло, как их начали миллионами экземпляров ставить. Так что в ближайшее время стоит ожидать вытеснение парктроников на ультразвуке… Хотя если новое поколение ультразвуковых сможет дополнить (например, как я понимаю, они более устойчивы к пыли) хотя бы на малых дистанциях парковки — их обязательно будут ставить. Вообще тема совместных сенсоров на 2 технологиях — это одно из крайне перспективных направлений.
По дельфинам — это вода ), в воде двумерную картинку хорошего разрешения и сегодня вполне строят. А у летучих мышей — хороший вопрос — сенсоры также одноканальные или больше? )))
А так — ход мысли в этом направлении, похоже, не только у вас:
«A 137-μW Area-Efficient Real-Time Gesture Recognition System for Smart Wearable Devices» ieeexplore.ieee.org/abstract/document/8579256 — прошлогодняя статья.
Парктроники — это все-таки одноканальный сенсор, т.е. просто расстояние. Проблемы разрешения в нем нет, ну и тоже — типа хорошая работа на расстояние около метра. Т.е. строго в рамках предыдущих ограничений кейс. Насколько звуковые линзы будут дешевы для них? Хороший вопрос…
По лидарам будет в следующей части, там прорыв на прорыве зреют просто потому, что по точности им нет равных на больших дистанциях. Как следствие — сейчас (как только начнут массово ставить) будет кардинальное снижение цены. Примерно, как в мобильных камерах глубины произошло, как их начали миллионами экземпляров ставить. Так что в ближайшее время стоит ожидать вытеснение парктроников на ультразвуке… Хотя если новое поколение ультразвуковых сможет дополнить (например, как я понимаю, они более устойчивы к пыли) хотя бы на малых дистанциях парковки — их обязательно будут ставить. Вообще тема совместных сенсоров на 2 технологиях — это одно из крайне перспективных направлений.
По дельфинам — это вода ), в воде двумерную картинку хорошего разрешения и сегодня вполне строят. А у летучих мышей — хороший вопрос — сенсоры также одноканальные или больше? )))
Не знаю как вас, а меня поразило вот это сравнение:
Умом-то понимаешь, что процессоры сегодня очень быстрые, но когда их сравнивают с тем, что движется с максимально возможной в нашей вселенной скоростью, лично я малость офигел :)
За один такт процессора на 3 ГГц свет успевает пролететь всего 10 сантиметров. Или 10 тактов на метр.
Умом-то понимаешь, что процессоры сегодня очень быстрые, но когда их сравнивают с тем, что движется с максимально возможной в нашей вселенной скоростью, лично я малость офигел :)
ToF и Structured Light-камеры замечательны, но их главный недостаток, как мне кажется — они сильно мешают друг другу.
Несколько кинектов, смотрящих на один объект, начинают давать сильные искажения в каждом из них.
Так что для нескольких промышленных роботов, использующих эти камеры в одном пространстве без строгой синхронизации (в эту миллисекунду «светит» один робот, в следующую — другой и т.д.) есть риск начать видеть сильно хуже.
Depth By Stereo, естественно, такой проблемы лишены, но у них своя куча проблем, особенно с сильно однородными по цвету поверхностями.
Несколько кинектов, смотрящих на один объект, начинают давать сильные искажения в каждом из них.
Так что для нескольких промышленных роботов, использующих эти камеры в одном пространстве без строгой синхронизации (в эту миллисекунду «светит» один робот, в следующую — другой и т.д.) есть риск начать видеть сильно хуже.
Depth By Stereo, естественно, такой проблемы лишены, но у них своя куча проблем, особенно с сильно однородными по цвету поверхностями.
Выше про это кратко есть (что в Кинект 4.0 они предусмотрели синхронизацию нескольких девайсов из коробки). Т.е. эта проблема важна не всегда, прямо скажем. Например, для промышленного робота, который работает вообще в кожухе с фильтрованным воздухом и без пыли (а таковых большинство, средний ) проблемы чужой засветки вообще не существует, а камеры, которые работают вместе вполне себе выпускаются уже давно (например, таким был первый Кинект, хотя второй уже не был, а дальше это специально начали предусматривать).
Про стерео и сравнение будет во второй части скоро )
Про стерео и сравнение будет во второй части скоро )
Sign up to leave a comment.
Камеры глубины — тихая революция (когда роботы будут видеть) Часть 1