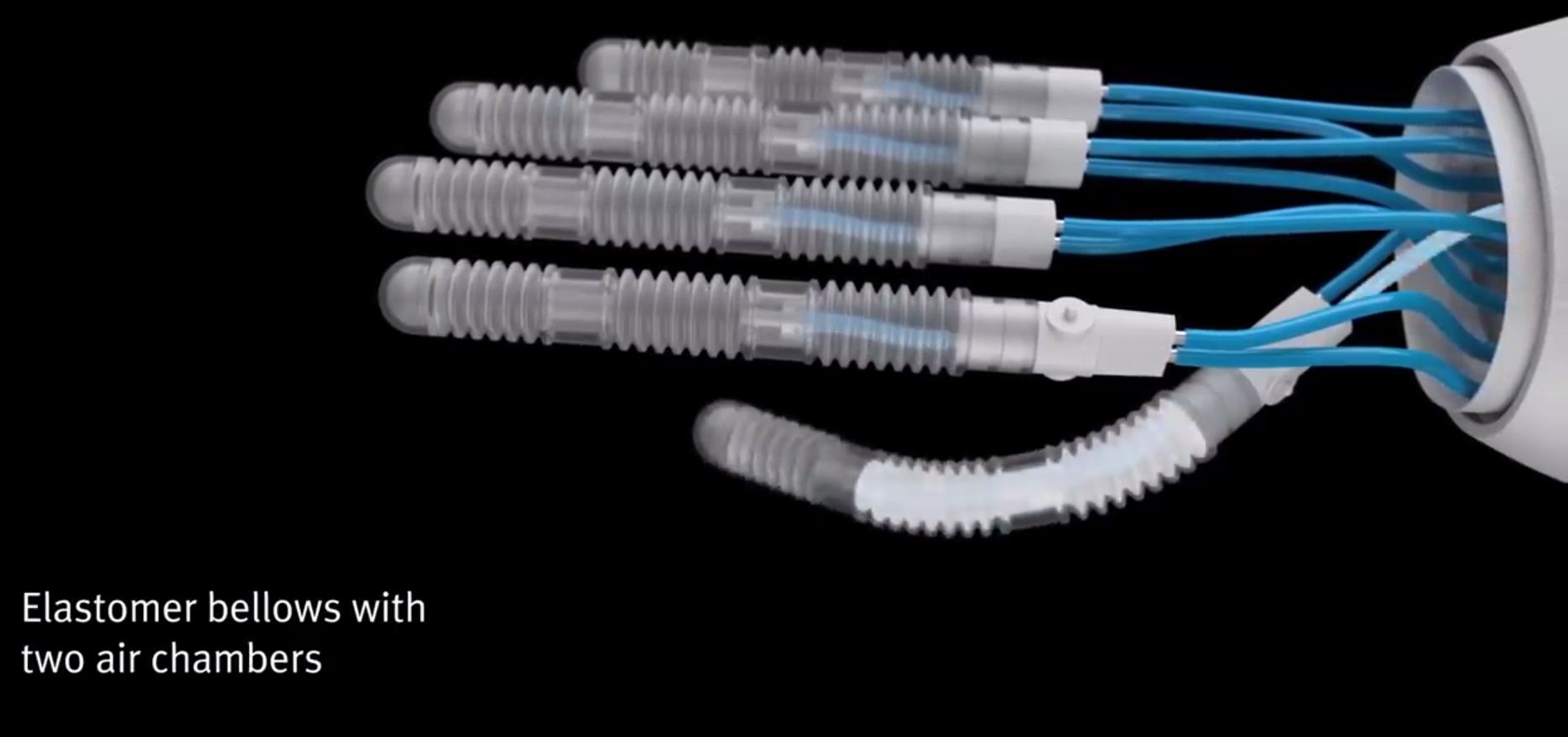
В данном решении нет скелетной структуры, рука выполнена из мягких и гибких материалов, фаланги пальцев выполнены из трехмерной текстильной ткани с тактильными сенсорами и гибкими проводниками, которые могут сгибаться помощью пневматических модулей. В запястье руки установлен узел с клапанами, которые приводят в движение элементы руки при необходимости мелко моторных движений.
Движениями BionicSoftHand управляет искусственный интеллект, способный обучаться методом проб и ошибок, а после адаптации к задаче быстро и автономно выполнять необходимые действия с предметами, по аналогии как это делает человек

Ссылка на описание от производителя решения BionicSoftHand тут.

Роботизированная рука BionicSoftHand оснащена:
— надувными сильфонами, вокруг которых располагается созданная с помощью технологии 3D-печати трехмерная ткань из эластичных волокон, которая изгибается вместе с движениями руки, когда в сильфоны подается воздух, по аналогии с работой мышц и сухожилий;
— пневматическими поворотными модулями;
— пневмоостровом на 24 пьезо клапана;
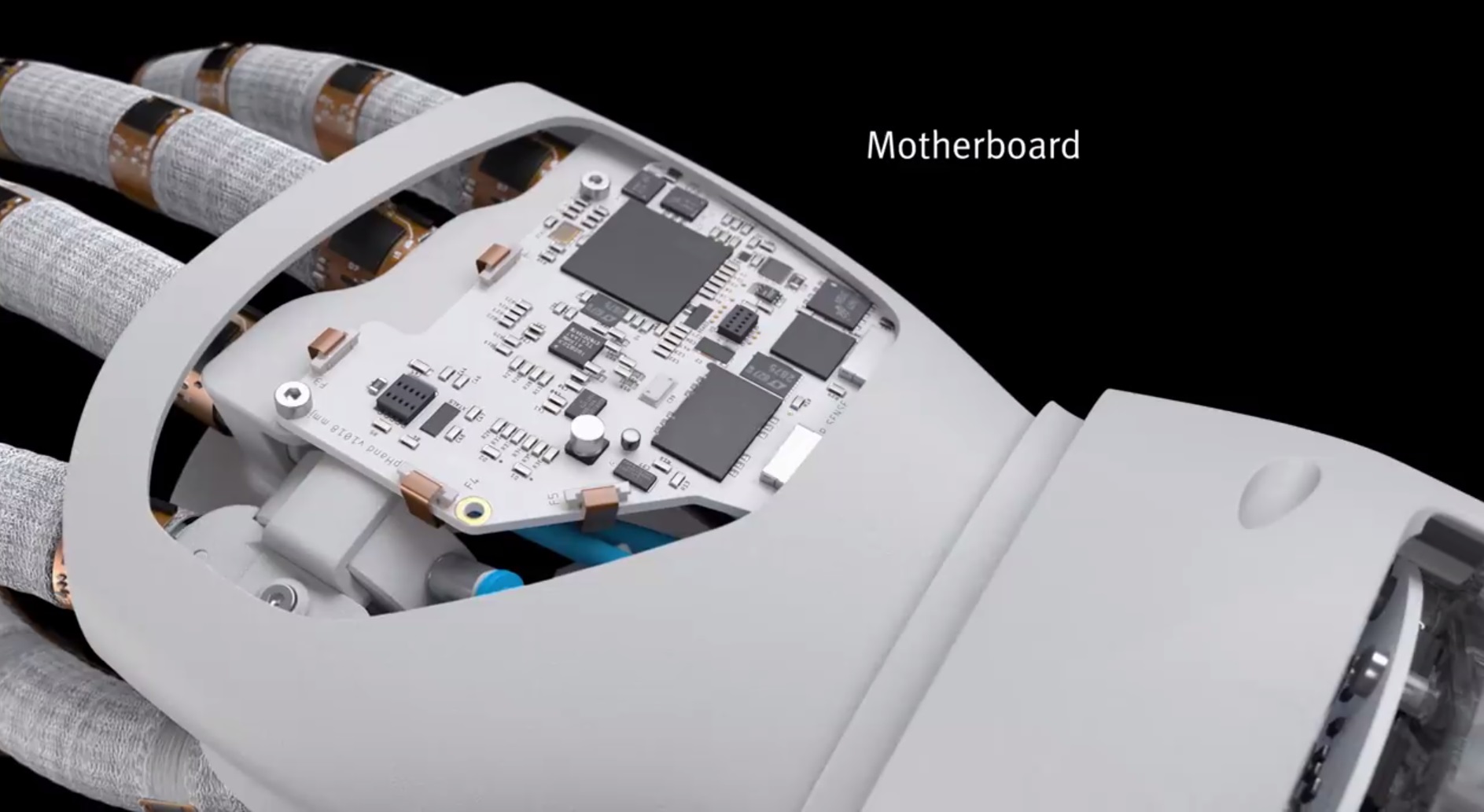
— бортовой материнской платой, в том числе для автономного управления движениями;
— датчиками инерции (движения) и силы (установлены в мягких пальцах), которые также созданные на базе гибких материалов и способны изгибаться в момент движения;
— самообучающимся модулем ИИ, способным самостоятельно просчитывать оптимальный способ взаимодействия руки с разными предметами и совершения разных действий, причем в кратчайшие сроки, получающим данные так же от 3D-камер с восприятием глубины для анализа предметов и движений.
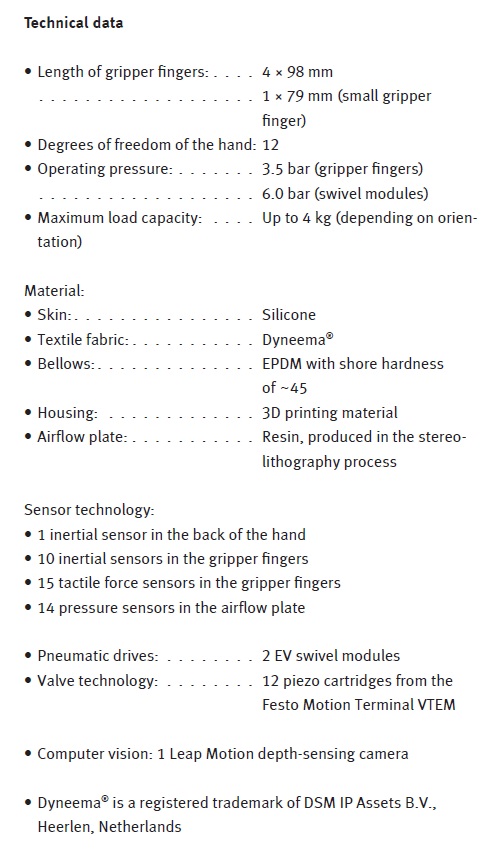
Технические характеристики компонентов устройства:


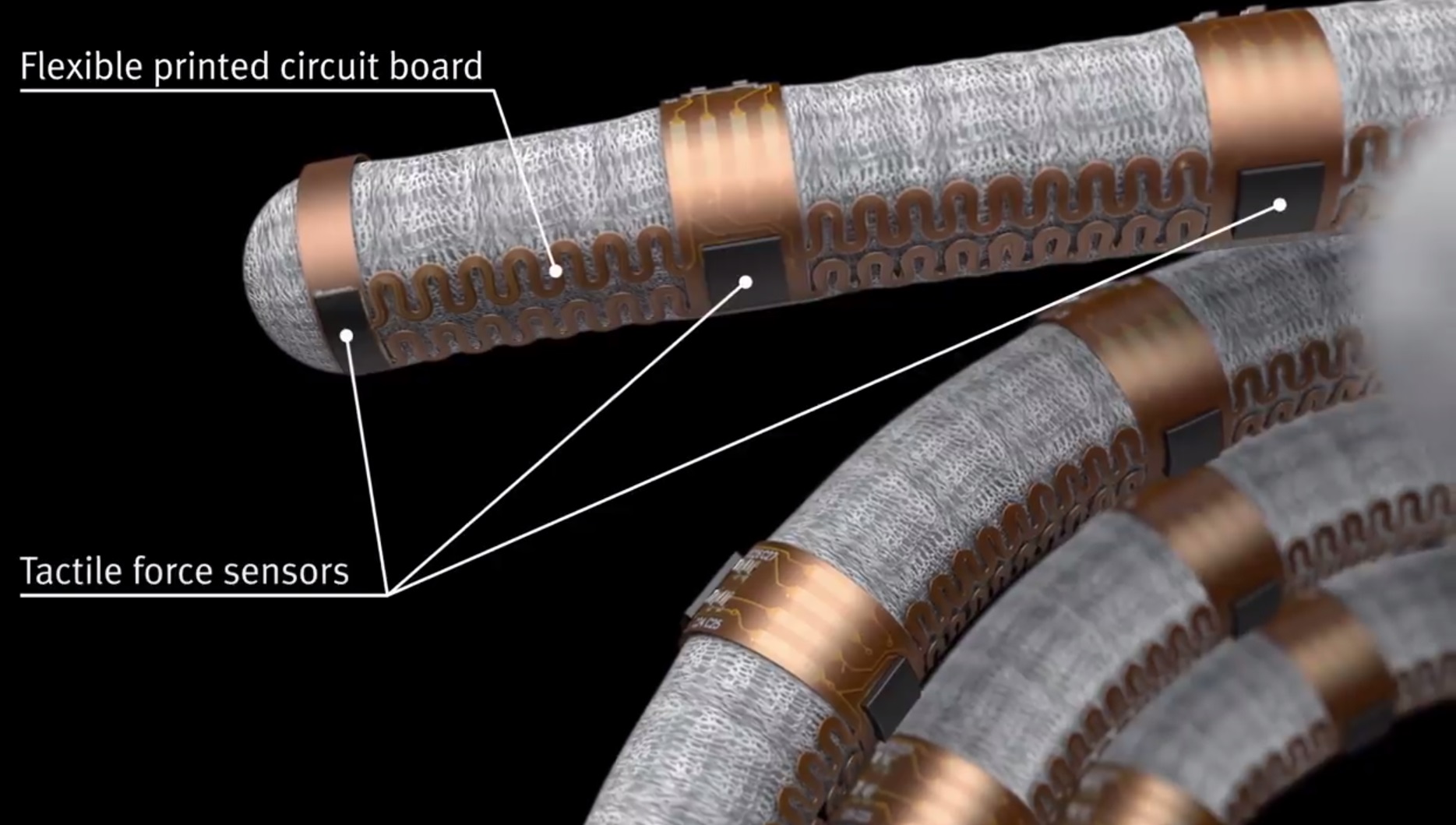





Массив сенсорных датчиков на пальцах руки обеспечивает обратную связь с системами управления рукой (с компонентами ИИ), сообщая о совершаемых движениях самой руки и пальцев, а также о способах и движениях при контакте с разными объектами, так же ИИ анализирует информацию о том, правильно ли расположен объект в руке для его манипуляции, используя матрицу контактного восприятия, имитирующую чувство осязания человека. Далее ИИ просчитывает какие усилия нужно приложить для удержания предмета, какая должна быть выполнена двигательная последовательность для положений и перемещений пальцев, насколько широко нужно раскрыть ладонь и так далее.

Первоначально рука BionicSoftHand не запрограммирована на какие-то конкретные движения, а подключённый к ее плате управления ИИ обучается в процессе выполнения тестовых задач с помощью использования технологии параллельного обучения, создавая в виртуальной среде, со временем позволяя роботизированной руке становится только «умнее», а для решения новых задач использовать уже ранее изученные и верифицированные при реальных действиях комбинации движений, которые далее оптимизируются под новые задачи.

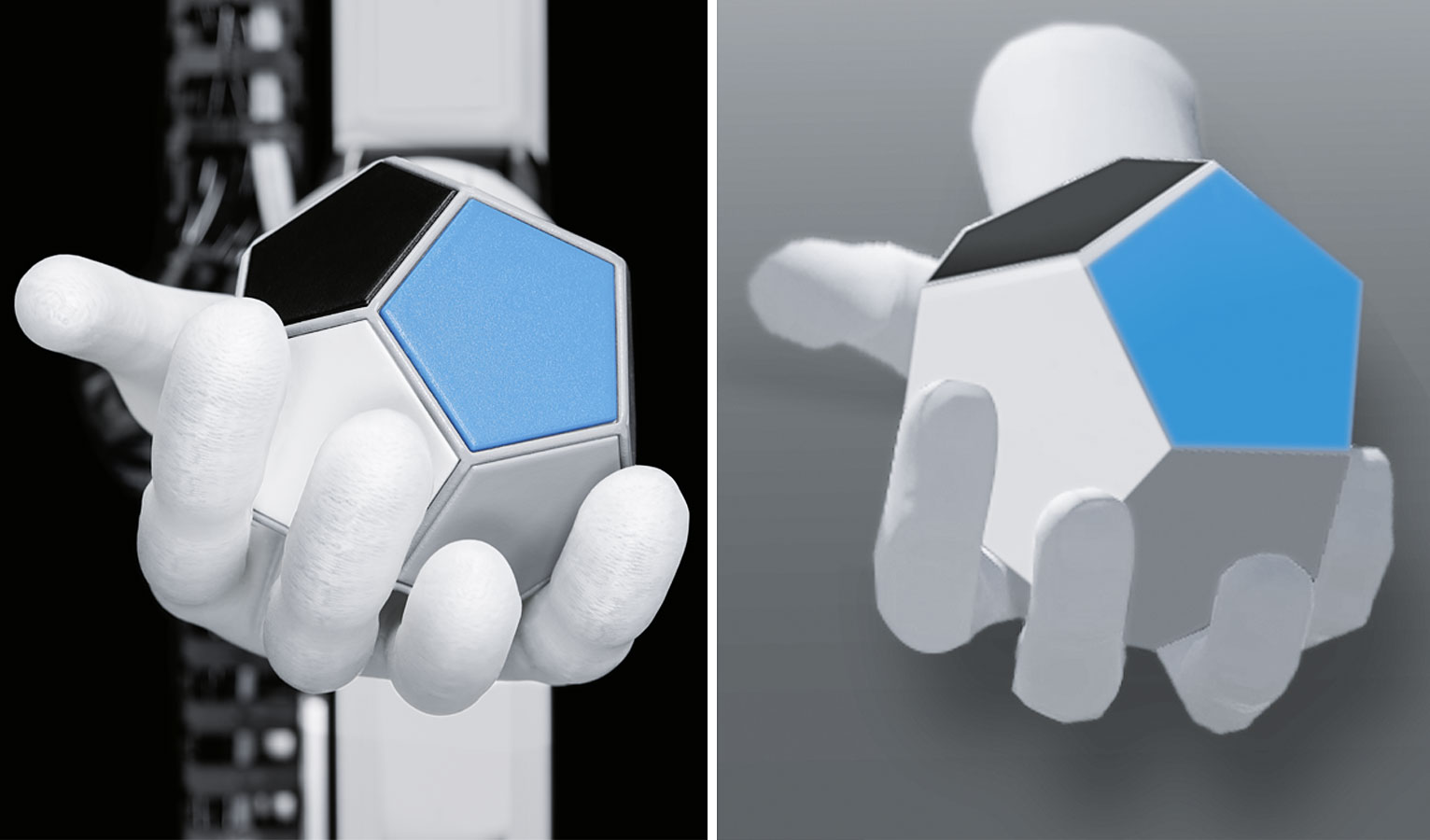

В демонстрационном видео ниже ИИ с роботизированной рукой дали задачу переместить помещенный в руку 12-гранный объект таким образом, чтобы определенная грань смотрела вверх, без объяснения действий по выполнения этой задачи.
Сперва, с помощью 3D-камеры с восприятием глубины, ИИ создает цифровую копию объекта, а затем помещает ее в виртуальную симуляцию со множеством виртуальных рук, которые манипулируют объектом до тех пор, пока не будет подобрана правильная комбинация.
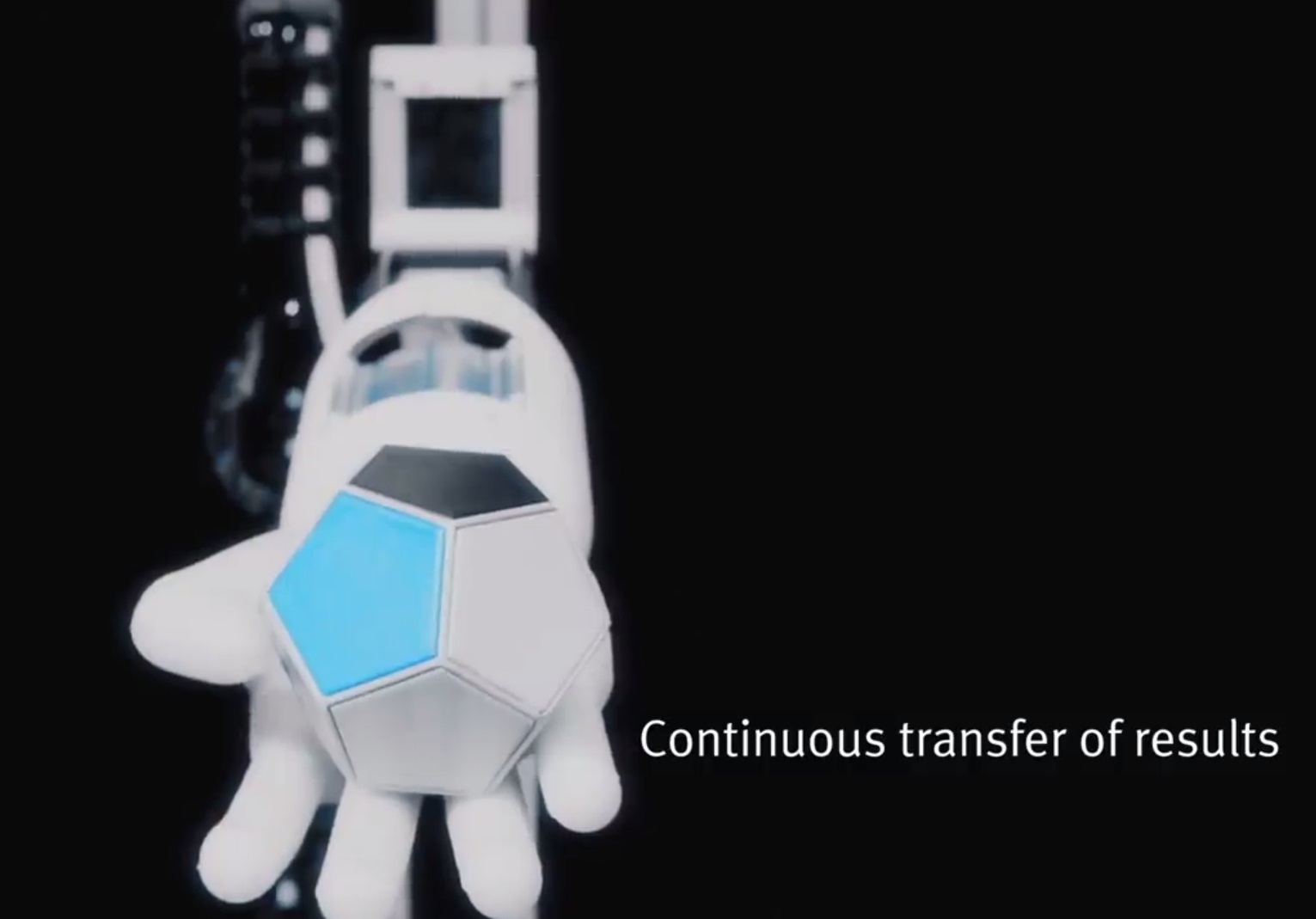
Затем ИИ просчитывает варианты, чтобы найти и выполнить быстро оптимальные действия с предметом, а потом выполняет их в реальности, управляя элементами BionicSoftHand.
Компоненты для создания Электроника Евгения Велтистова все ближе и ближе к реальности.