Comments 40
Ага, уже не так легко пинать бедного робота.

Радует, что они начали включать в ролики неудачи. Это всё равно впечатляет, но одновременно показывает, что эти механизмы все же вряд ли уничтожат нас всех прямо завтра. Но вообще, Слава Роботам! Да будут они милостивы.
Хмм, эти-то как нас уничтожат? Мир полон гораздо более совершенных четвероногих механизмов (тигров, крокодилов, собак) и у них нет никаких шансов победить хомосапиенсов.
Я бы больше боялся тех, кто играет в шахматы и вот в Starcraft недавно. Вот там — да, опасность. Но ещё эволюция нужна, наверное. Чтобы оно само себя копировало и пыталось развиваться.
Я бы больше боялся тех, кто играет в шахматы и вот в Starcraft недавно. Вот там — да, опасность. Но ещё эволюция нужна, наверное. Чтобы оно само себя копировало и пыталось развиваться.
UFO just landed and posted this here
Так, я тут уже недавно писал идею о применении ИИ в войсках, сейчас дополню.
Условно возьмем, что любую армию можно разделить на такие уровни:
1. Взвод-рота (условно называю тактическим). Тут ИИ представлен отдельными «ботами», которые умеют «играть в Контру/Кризис/что там изобрели с ИИ покруче». ИИ уровня «лейтенант» (командир взвода-роты) дает этим «ботам» тактические задачи типа «Иди туда и убивай на пути всех без идентификатора 'свой'. По достижении цели займи круговую оборону». Это может быть пехота или даже 10 танков (в WoT не играл, там сингла с ботами нет?).
2. Уровень оперативно-тактический. Где-то до полка-бригады, ИИ отдает команды своим «ротам», получает от них информацию типа «Смогли пройти в район 55° 45’ сев. широты, 37° 37’ восточной долготы. Ведем бой с противником неизвестного типа, численностью 5-10 единиц… (заглушено помехами)».
3. А стратегический ИИ у меня двигает полками и бригадами, имея от «поковников» и «генерал-майоров» информацию типа «Эта провинция у нас под контролем, местное население не проявляет агрессии и абсолютно поддерживает нас. Уровень преступности за последние 2 недели упал до минимума».
На любом из этих 3 уровней ИИ может быть заменен человеком.
P.S. Не обижаетесь на то, какие я взял координаты?
Условно возьмем, что любую армию можно разделить на такие уровни:
1. Взвод-рота (условно называю тактическим). Тут ИИ представлен отдельными «ботами», которые умеют «играть в Контру/Кризис/что там изобрели с ИИ покруче». ИИ уровня «лейтенант» (командир взвода-роты) дает этим «ботам» тактические задачи типа «Иди туда и убивай на пути всех без идентификатора 'свой'. По достижении цели займи круговую оборону». Это может быть пехота или даже 10 танков (в WoT не играл, там сингла с ботами нет?).
2. Уровень оперативно-тактический. Где-то до полка-бригады, ИИ отдает команды своим «ротам», получает от них информацию типа «Смогли пройти в район 55° 45’ сев. широты, 37° 37’ восточной долготы. Ведем бой с противником неизвестного типа, численностью 5-10 единиц… (заглушено помехами)».
3. А стратегический ИИ у меня двигает полками и бригадами, имея от «поковников» и «генерал-майоров» информацию типа «Эта провинция у нас под контролем, местное население не проявляет агрессии и абсолютно поддерживает нас. Уровень преступности за последние 2 недели упал до минимума».
На любом из этих 3 уровней ИИ может быть заменен человеком.
P.S. Не обижаетесь на то, какие я взял координаты?
хмм… мне кажется, или установки уровня 1 «Иди туда и убивай на пути всех без идентификатора 'свой'» приведут к «местное население не проявляет агрессии и абсолютно поддерживает нас» только за его (т.е. местного населения) неимением?
Заголовок спойлера
дефолт сити — дефолт координаты
Вы сильно не обижайтесь, я как бы живу в другом «дефолт Сити», за «поребриком» от Вашего.
Но ни в коем случае не поддерживаю идею послать таких роботов, даже с вариантом «Местные не проявляют агрессии и не собираются на несанкционированные митинги — не трогай местных. Все ведь местные москвичи носят с собой паспорт с московской пропиской?».
Но ни в коем случае не поддерживаю идею послать таких роботов, даже с вариантом «Местные не проявляют агрессии и не собираются на несанкционированные митинги — не трогай местных. Все ведь местные москвичи носят с собой паспорт с московской пропиской?».
Хм… запас хода может быть вполне приличным, несколько часов. Но вот это же просто радиоуправляемая самоходная платформа? То-есть у нее нет зрения и ИИ, просто с пульта оператора?
А вообще штука забавная… если будет стоить не сильно дорого и интегрироваться со смартфоном, то можно и прикупить) Корзинку на спину и до магазина с ней ходить.
Вроде еще нет магазинов, куда нельзя ходить с роботами.
А вообще штука забавная… если будет стоить не сильно дорого и интегрироваться со смартфоном, то можно и прикупить) Корзинку на спину и до магазина с ней ходить.
Вроде еще нет магазинов, куда нельзя ходить с роботами.
Хм… запас хода может быть вполне приличным, несколько часов
Это да. Даже человек в среднем тратит 100 Вт на выделение тепла, а на само движение при ходьбе ~50 Вт, а при максимально быстром длительном беге ~250 Вт. То есть 3 кг аккумуляторов роботу-андроиду должно хватать на 6 часов работы, а роботу-собаке и еще дольше. При условии, что кпд редукторов будет высок (у моторов там и так 95% на номинале, а при кратковременно-переменной работе не ниже 80%).
Да, похоже, без редукторов никак. Поглядел gimbal моторы на али, мотор в 500 грамм даёт момент 2 Н*м. То есть если лапа, например, 50 сантиметров, он не поднимет сам себя, а должен поднять 12 штук плюс батарея и корпус.
Думаю фишка в том, что они что-то своё инновационное разработали, чего пока нет у всех. Иначе бы я сам закупился комплектухой и собрал бы какого угодно робота.
Нет, там скорее всего обычные бесколлекторники (их даже видно на видео). Да и не существует технологий, чтобы там что-то принципиально улучшить. Максимум что можно сделать — вместо ниодимовых магнитов поставить самарий-кобальтовые, которые немного хуже неодимовых, но способны работать на температурах под 250 градусов. Это как бы позволяет использовать большие токи, т.е. получить большую мощность на меньшем размере мотора. Так как, вообще говоря, миниатюризация и рост мощности современных электромоторов ограничены именно температурой магнитов. Которые выше 80-100 град размагничиваются, если речь о ниодимовых. И чтобы изоляция проводов не поплавилась, но это не так критично. Ну и справедливости ради нужно отметить, что также частотой перемагничивания сердечника. Хотя есть бесколлекторники без сердечника, на которых это не распространяется.
Но это явно не тот случай. Да и нет смысла, так как речь идет о средней температуре во время работы. А пиковые значения, чтобы например резко дернуть ногой, у электромоторов могут превышать в 2-3 раза номинальную мощность. Грубо говоря, развиваемый момент (усилие) почти линейно зависит от тока, а ток приводит к нагреву, но важна средняя температура, а не пиковая.
Так что бесколлекторник как можно большего диаметра (это большой момент, но и больше масса) и редуктор, и максимально снижать массу ног, ничего лучше на данный момент нет. Существуют ультразвуковые (пьезоэлектрические) электромоторы, способные в теории развивать какой угодно момент при таком же кпд как у бесколлекторника. То есть обходиться без редуктора. Но существующие образцы пока сильно уступают даже стандартным бесколлекторникам.
Я думаю, там все дело в очень точных датчиках тока (для обратной связи) и претензионных энкодерах для определения положения ног. А софт такие роботы, насколько я знаю, используют древний. Хотя раз ролике пишут, что здесь применяют Convex MPC, то это прогресс. MPC (Model Predictive Control) редко на практике используют в роботах.
Но это явно не тот случай. Да и нет смысла, так как речь идет о средней температуре во время работы. А пиковые значения, чтобы например резко дернуть ногой, у электромоторов могут превышать в 2-3 раза номинальную мощность. Грубо говоря, развиваемый момент (усилие) почти линейно зависит от тока, а ток приводит к нагреву, но важна средняя температура, а не пиковая.
Так что бесколлекторник как можно большего диаметра (это большой момент, но и больше масса) и редуктор, и максимально снижать массу ног, ничего лучше на данный момент нет. Существуют ультразвуковые (пьезоэлектрические) электромоторы, способные в теории развивать какой угодно момент при таком же кпд как у бесколлекторника. То есть обходиться без редуктора. Но существующие образцы пока сильно уступают даже стандартным бесколлекторникам.
Я думаю, там все дело в очень точных датчиках тока (для обратной связи) и претензионных энкодерах для определения положения ног. А софт такие роботы, насколько я знаю, используют древний. Хотя раз ролике пишут, что здесь применяют Convex MPC, то это прогресс. MPC (Model Predictive Control) редко на практике используют в роботах.
которого научили [...] совершать сальто назад. Насколько известно, другие роботы (кроме игрушечных) такое делать не умеют.
www.youtube.com/watch?v=vNNiPn4tXns
Жду, когда сделают «квадроходы». Этакие квадроциклы, но на ножках. Сверху сидушка, быстро бегать по пересеченной местности с человеком. До определеной степени неровности поверхности платформу можно сделать очень стабилизированной и плавность хода будет потрясающая (фильтр высоких частот). Если еще делать упреждающий «клиренс», то квадроход будет заранее начинать приподниматься или опускаться (фильтр низких частот).
«Крышка банки Мейсона» для русского читателя не очень понятное сравнение. Хоккейная шайба или банка шпрот понятнее.
«Крышка банки Мейсона» для русского читателя не очень понятное сравнение. Хоккейная шайба или банка шпрот понятнее.
Хотелось бы понять, почему робот-гепард не может воспроизводить движения своего прообраза — то ли технически не получается, то ли разработчики принципиально не хотят, то ли текущий способ передвижения и так хорош...
У гепарда по 30 мышц на ногу, а у робота только по три моторчика.
Я бы еще добавил, что на самом деле, гепард развивает такую скорость благодаря спине, а не ногам. То есть фактически, он «бежит спиной» а не ногами.
У гепарда по 30 мышц на ногу, а у робота только по три моторчика.
ЕМНИП, у многих хороших бегунов происходит упрощение конечностей с ходом эволюции. Копыта лошадей, примитивные ступни страусов, и т.п. Вроде бы про хомосапиенсов говорят, что если бы наша эволюция мозга задержалась — тоже со временем получили бы, как все степные животные, копыта.
По тем же причинам, почему сейчас нет ранцевых махолетов. Человеку с крыльями размером с дельтаплан для горизонтального полета по аэродинамике достаточно мощности 800-1000 Вт (увеличим до 1500 Вт, чтобы и высоту набирать). Такую мощность выдает электромотор массой 0.5 кг, а 3 кг LiPo аккумуляторов было бы достаточно на 20 минут полета. Ну и крыло такого размера весит от 1.5 кг (параплан). Представляете? Девайс размером с коробку из-под обуви и массой 5 кг, в теории может позволить любому летать.
Увы, на данный момент по сумме параметров не существует аналогов биологическим мышцам, чтобы приводить в движение такие крылья. Приводов, которые могли бы развивать такое же усилие при таком же быстродействии (а главное — поддерживали такой же диапазон), и весили так же мало. Электромоторы для движений как у животных требуют редукторы с огромным передаточным числом под 100:1, из-за чего их кпд становится чрезвычайно низок. И они очень громоздкие, сложно скомпоновать нормально.
Вот пример как работают и переключаются в динамике мышцы у собаки (получено из рентгена в движении). Повторить такое электромоторами сейчас практически невозможно. Из-за сложности компоновки и не соответствия параметров работы электромоторов работе мышц. Биологически мышцы — уникальная и пока не превзойденная человеком вещь в этом плане.
youtu.be/WRyu35wrvT0?t=1489
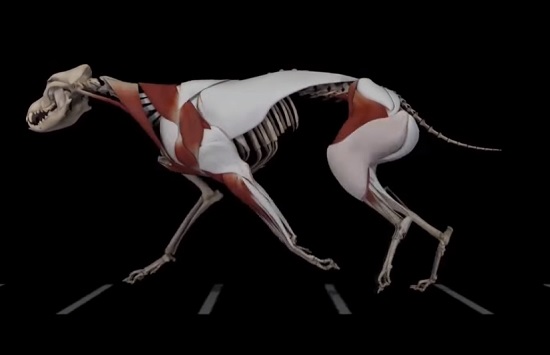
Увы, на данный момент по сумме параметров не существует аналогов биологическим мышцам, чтобы приводить в движение такие крылья. Приводов, которые могли бы развивать такое же усилие при таком же быстродействии (а главное — поддерживали такой же диапазон), и весили так же мало. Электромоторы для движений как у животных требуют редукторы с огромным передаточным числом под 100:1, из-за чего их кпд становится чрезвычайно низок. И они очень громоздкие, сложно скомпоновать нормально.
Вот пример как работают и переключаются в динамике мышцы у собаки (получено из рентгена в движении). Повторить такое электромоторами сейчас практически невозможно. Из-за сложности компоновки и не соответствия параметров работы электромоторов работе мышц. Биологически мышцы — уникальная и пока не превзойденная человеком вещь в этом плане.
youtu.be/WRyu35wrvT0?t=1489

Хотелось бы понять, почему робот-гепард не может воспроизводить движения своего прообраза
мне наоборот показалось что многие движения очень естественные. Например, баланс восстановить после удара в бок роботы (что четвероногие, что двуногие) очень реалистично пытаются.
Обычные движения — ну, надо технологию полировать. Плюс суставы у них в разные стороны смотрят с гепардом.
Кстати подумалось, что для обеспечения крейсерского хода не обязательно использовать совсем уж полную работу сервоприводов конечностей, которая достаточно сильно высаживает заряд. При движении по ровной поверхности траекторию движения конечностей можно организовать при помощи всего лишь одного двигателя и навороченной кривошипно-шатунной (или как ее там правильно называют) раздатке. По сути в таком режиме робот просто катится. А уже относительно этого стабильного и экономного «качения» на такой подвеске сервоприводы конечностей используются для подруливания и стабилизации. Получаем на крейсерском режиме сильно сокращенный ход сервоприводов и движение за счет одного основного тягового двигателя.
Размер примерно равен размеру крышки банки Мейсона
А это больше кружки Эсмарха?
PS: Временами подбешивает местечковый снобизм американских популяризаторов, сравнивающих что-либо то с Гранд-каньоном, то с Эмпайр Стейт Билдингом. Типа все просвещенные люди хоть раз в жизни должны повидать такие общеизвестные вещи!
Нет, всё проще. Так-то для любого общества вполне нормально использовать местные концепты и сравнения, привязанные к своим достопримечательностям (француз, предположу, при написании статьи для местной аудитории вполне мог бы не особо задумываясь сравнить бы что-то с Триумфальной аркой или там с Эйфелевой башней, итальянец — с Пизанской и так далее… мгхм, стереотипы-стереотипчики). Не учитывать менталитет и устоявшиеся в обществе носителей другого языка понятия — типичная фишка ленивых переводчиков.
Конечно, в некоторых случаях допустимо оставлять почти исходные или приближенные к оригинальным выражения для лучшего погружения в атмосферу или за неимением аналога на целевом языке, но вот в данном случае совершенно без потери смысла можно было бы использовать либо абстрактный примерный размер без упоминания каких-либо авторских стеклянных ёмкостей, либо уж на крайняк сказать «размеру крышки банки кофе», которые, ЕМНИП, примерно эквивалентны.
Конечно, в некоторых случаях допустимо оставлять почти исходные или приближенные к оригинальным выражения для лучшего погружения в атмосферу или за неимением аналога на целевом языке, но вот в данном случае совершенно без потери смысла можно было бы использовать либо абстрактный примерный размер без упоминания каких-либо авторских стеклянных ёмкостей, либо уж на крайняк сказать «размеру крышки банки кофе», которые, ЕМНИП, примерно эквивалентны.
Шесть сантиметров в диаметре и один толщины, должно быть такие размеры у моторов.
del
Интересно, когда гугл заблокирует видосы с избиениями роботов.
Вот прямо смотрел видео, восхищался, и ждал коронного пинка :)
Как-то в отличие от бостон-динамикс, все очень динамично и естественно.
Доделать вижн, голосовое управление — и отличнаясобака гепард-поводырь для людей с проблемным зрением.
Доделать вижн, голосовое управление — и отличная
А команде «Фас» обучат при наличии стальных челюстей из закаленной стали, сжимаемых гибравликой с усилием 1000 Н?
Ну, многие бытовые процессы и так автоматизируются неплохо ). Добавить им мобильности в возможности перемещения в пределах квартиры логичный и последовательный шаг.
Робособака-поводырь, которая может сопровождать человека по условному бездорожью, которая в случае чего может зафиксировать на видео и передать в полицию злоумышленника, а хозяину вызвать скорую, или хотя бы позвать на помощь окружающий, громкоговорителем пояснив что не так.
Зависит от цены, но в качестве сопровождения слепых или пожилых — весьма неплохая штука. Может не для СНГ, но в развитых странах явно найдет применение.
Зависит от цены, но в качестве сопровождения слепых или пожилых — весьма неплохая штука. Может не для СНГ, но в развитых странах явно найдет применение.
У инкубаторов для микробов вестибулярный аппарат хуже работает чем у него. Осталось ножиком научить пользоваться чтобы организмы на ремни мог пускать

Sign up to leave a comment.
Робот-гепард от MIT умеет делать сальто назад и быстро бегать