Comments 55
Все таки не надо говорить, что в сердце беспилотника AI. В сердце беспилотника четкая логика, запрограммированная человеком.
AI в виде нейронных стетей используется только на этапе первичного анализа и обработки информации — классификации объектов на изображениях с камер. Потом вся эта информация все равно скармливается обычной программе управления.
И те и те.
Просто приёмник даст те самые 5-10 метров.
А если использовать высокоточный приёмник да добавить базовую станцию для DifferentialGPS как раз получится около метра.
А если GPS военный...
Двухканальник+одометрия+IMU+RTK дают сантиметровую точность по цене до миллиона рублей.
DGPS я упомянул в контексте получения более точного ephemeris с коррекцией на реальные атмосферные условия.
Нюанс тут в том что это работает нормально относительно недалеко от базовой станции.
Плюс у высокоточного приёмника антенн обычно больше и они дают лучшую чувствительность.
Так что можно получать GPS+GLONASS+GALILEO и интерполировать по данным от 4+ спутников.
Всё это сложно и как выше замечено не всегда работает.
В одном месте статьи написано что у Теслы второй уровень, в другом месте что третий уровень. Да ещё почему то топчуться с третьим уровнем, когда ни у кого в коммерческом пользовании кроме них третьего уровня нет. Да ещё они обходятся без обязательных по статье лидаров. Непонятно
Квалификация уровней, конечно, абсолютно нетехническая, что не позволяет по нормальному судить о прогрессе. Никто еще не продемонстрировал даже решения двух задач а) держаться полосы и выбирать правильную скорость б) безошибочно тормозить перед препятствиями. Оно и очевидно, обе эти задачи требуют точного распознавания и классификации объектов.
Очевидно, что Waymo и Tesla выбирают абсолютно разные подходы к решению задач, поэтому их прогресс не должен смешиваться. В то, время как Waymo «тренирует» свои робомобили под один конкретный район-город и всячески стремится сделать такси, Тесла стремится сделать как можно более общее решение для всех стран, чтобы автомобиль мог ездить хотя бы по автострадам (трейлер, фура и т.п.). Обе эти задачи имеют абсолютно конкретное и разное применение на рынке, поэтому про полный автопилот пока можно забыть на 5 лет минимум, до тех пор пока эти задачи не будут решены.
P.S. больше всего нравятся независимые тесты от www.euroncap.com/en/vehicle-safety/safety-campaigns/2018-automated-driving-tests — и да Tesla Model 3 лидер, но даже они не проходят около 30% тестов.
Ух-ты, наконец-то реальное доказательства для тех, кто утверждает, что у немцев технология не хуже, чем у Маска. А нифига — пролетают и Ауди и Мерседес и БМВ. Причем по одинаковой реакции (например игнорирование стоячего автомобиля на 130км/ч) там похоже один и тот же разработчик этих систем.
К сожалению Вольво вообще убило — должна была по идее пройти тесты лучше всех, а в итоге совсем все плохо.
Лидары дороги, сложны, скорость сканирования ограничена чисто механическими критериями и тд тп, а камеры могут гнать огромный поток данных непрерывно, при том качество «картинки» зависит исключительно от вычислительной мощности и алгоритмов анализа.
Качество картинки с камеры еще зависит от времени суток, засветки от солнца, тумана, грязноты объектива. Поэтому в автономном автомобиле я бы не отказался в дополнение к ним от пары датчиков на другом принципе.
Есть еще радары.
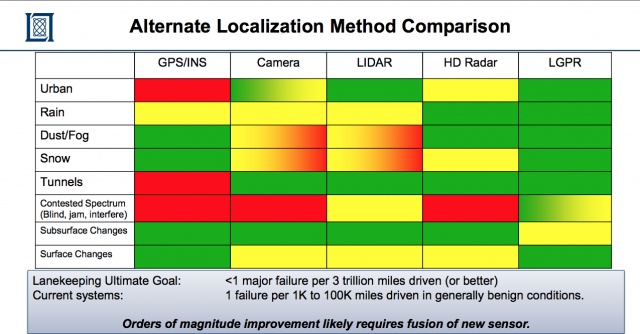
Никогда нельзя положиться только на 1 сенсор, поэтому и существует senson fusion. Таблица для наглядности:
А камеры + GPS это уже минимум 2 типа сенсора получается.
Зрение у человека это сложный процесс который происходит преимущественно в мозгу.
Добавьте к этому десятки сенсорных систем человека.
Миллиарды лет процесс распознавания стимулов и действий на основании распознанного оттачивался до состояния позволяющего действовать более менее адекватно.
Не удивительно, что эта система приспособилась и к вождению автомобиля.
Для этих механизмов нет принципиальной разницы убежать от змеи замеченной в траве или объехать фуру в правой полосе.
Автономный автомобиль (свободно действующий робот) это совсем другой класс задач и подходы к ним иные, несмотря на внешнее подобие.
Так что сравнение с человеком ограниченно полезно.
Не уверен что процесс шёл так. Есть ограничения которые учитываются по умолчанию, как например наличие двух рук или скорость реакции. Так что эти " если бы" пока константны.
Появится много робоавтомобилей и некоторые "константы" можно будет пересмотресь.
Впрочем, если появится супер-человек который будет способен ловить пролетающую мимо пулю или не повышая аварийности водить автомобиль со скоростью 400 км/ч — я не против. Но пока, увы, ничего подобного не наблюдается. )))
Но это работает, чёрт возьми. :)Да, даже фантастам того времени было сложно такое представить.
Дело времени, программисты доточат.Это можно отнести ко всему: от электронных уборщиков до электронного мирового правительства.
Дело времени, программисты доточат.
одно дело что ткнуть в экран и запустить видеочат — это строгий логический процесс с очень четко ограниченными вводными, это в принципе и 50 лет назад можно было реализовать, правда некомпактно.
а вот по поводу ИИ у меня большие сомнения именно в методологии его работы…
и я вот программист както не догадываюсь что там «доточить» такое можно… хотя наверное есть гдето особо умные программисты… но чтото не видно результатов их работы
На мой взгляд, нужно делать специальные камеры с предобработкой картинки и ставить их побольше, чтобы кленовый лист упавший вдруг на камеру, не стал проблемой.
Нужен некоторый механизм анализа динамики ситуации, что вот автомобиль впереди вильнул, быть может там препятствие или яма, вот автобус остановился перед пешеходным переходом, надо замедлиться и посмотреть, не выбежит ли человек. Вот баба за рулем болтает и по полосе то же, надо ее поскорее обогнать
Стерео не особенно нужно.
Два кадра из потока дают неплохую стереобазу.
Видел уже три камеры на лобовом с разной дальностью фокусировки (tele, normal, fisheye)
Много камер ставят вокруг- боковые, задние.
Учитывайте что от каждой камеры идёт поток около 1GB/sec данных, умножьте на количество камер и все алгоритмы должны отрабатывать за ~30 ms.
Задачка добавления ещё одной камеры или сенсора внезапно становится сложнее и сложнее.
А GM на высоких позициях, потому что вложил миллиарды, и автомобили могут ездить только на отдельных участках отдельных трасс в США.
Несколько лет назад, помнится, кто-то запускал проект автопилота с открытыми исходниками по смешной цене. Если ничего не путаю, назывался он comma.ai — про них сейчас хоть что-нибудь слышно?
Технологии доступны уже сейчас, потребность есть. Внедрение беспилотников на таких дорогах не заставит себя ждать.
Но я считаю что для повышения надежности и безопасности, камер должно быть больше (обеспечить круговой обзор) и надо дополнительно использовать радары на основе фазированных решеток на печатных платах — они очень дешевы и не содержать двигающихся узлов, прекрасно встраиваются в любой кузов, но! Они также требуют очень сильного ПО, которое сейчас очень плохо развито
значить проблему МОЖНО
Осталось создать аппаратно-программный модуль, который ничем не уступает в обработке визуальных сигналов тому, который у вас в голове.
Осталось создать аппаратно-программный модуль, который ничем не уступает в обработке визуальных сигналов тому, который у вас в голове.Можно значительно проще. Абстракция вам должна быть известна, поэтому полное распознавание не нужно. У машин есть другие инструменты, которые не доступны человеку — радары и вычисления, о которых человек даже не задумывается, а машина считает.
Когда я сижу в пассажирском кресле, я не буду чувствовать себя комфортно независимо от того, кто управляет машиной, компьютер или пилот формулы-1.
Автопилот — это круто, но руль оставьте, чтобы можно было перехватить управление, если что.
Грубо говоря, машина увидев летящую по встречке фуру просчитает ее траекторию и решит прибавить газу и обрулить, а человек инстинктивно ударит по тормозам, не даст объехать, но и затормозить не успеет.
Можно оставлять фейковый руль, не подключенный к колесам, чисто для успокоения нервных пассажиров.
И очень-очень долго и дорого будут адаптировать беспилотные автомобили к плохим дорогам и плохим погодным условиям. А ведь многие водители сами любят водить машину, и беспилотная она им нужна только в случае сильной усталости или алкогольного опьянения. И многие из этих случаев можно решить с помощью такси или жены за рулём.
В то, что можно это всё сделать технически, я верю — лет через 10 — 20.
В то, что все исследования, разработки и испытания когда-нибудь окупятся — не верю.
И очень-очень долго и дорого будут адаптировать беспилотные автомобили к плохим дорогам и плохим погодным условиям. А ведь многие водители сами любят водить машину, и беспилотная она им нужна только в случае сильной усталости или алкогольного опьянения. И многие из этих случаев можно решить с помощью такси или жены за рулём.
В то, что можно это всё сделать технически, я верю — лет через 10 — 20.
В то, что все исследования, разработки и испытания когда-нибудь окупятся — не верю.
Беспилотные автомобили для начинающих