Comments 26
Оффтоп: а почему под Safari не видно формул? Вот совсем? На Chrome все есть, все норм.
эх, ностальгия, нахождение экстремумов, золотое сечение, градиентный метод, линейное программирование, канторович с фанерным трестом… жаль спустя 15 лет всё вылетело из головы, хочется освежить память, но мобильный браузер ни в какую не хочет отображать формулы)
Если интересно, то могу посоветовать отличную книжку Numerical Optimization. Книжка фокусируется на минимизации гладких нелинейных функций (т.е. proximal gradient там нет, насколько я помню). На мой взгляд идеальная точка старта если «хочется освежить память»
Еще есть Boyd Convex Optimization но это уже посложнее
Еще есть Boyd Convex Optimization но это уже посложнее
требуют специфических дополнительных вычислений, которые обычно более вычислительно затратны, нежели вычисление градиента
При всем уважении, в том же BFGS кроме вычисления градиента требуется только несколько матричных умножений и скалярных произведений. Практически всегда градиент более затратен по вычислениям. Другое дело, что хорошо объяснить как работает BFGS достаточно сложно (лично я хороших и в то же время прозрачных объяснений не встречал)
Согласен, тут я немного приврал. Вообще говоря для квадратичных функций поведение BFGS схоже с методом сопряженных градиентов, по крайней мере сходится за конечное число шагов, но не уверен, что умеет использовать разреженность матриц. В нелинейном случае, если не считать вычисление градиента, то метод сопряженных градиентов (а остальные уж тем более) не делают умножений матрица-вектор. Вроде бы понятно, что если размерность пространства больше ~10^4-10^5, то это становится критичным.
Важно что BFGS собирает намного больше информации о ландшафте ф-ии, т.к. «помнит» больше шагов
Ему это и не нужно. Если хранить аппроксимированный обратный гессиан слишком дорого, то есть LBFGS который хранить лишь к векторов и стоимость шага становится близкой к CG.
Ну и на практике BFGS практически всегда дефолтный алгоритм во всяких библиотеках для оптимизации, типа scipy.optimize, в отличии от CG
но не уверен, что умеет использовать разреженность матриц
Ему это и не нужно. Если хранить аппроксимированный обратный гессиан слишком дорого, то есть LBFGS который хранить лишь к векторов и стоимость шага становится близкой к CG.
Ну и на практике BFGS практически всегда дефолтный алгоритм во всяких библиотеках для оптимизации, типа scipy.optimize, в отличии от CG
Тем не менее, если этот текст будет востребован, я с удовольствием сделаю подобный обзор и по ним.
А можно вместо обзора подробный разбор одного из методов? С интерпретацией картиночками и выводом формул. Желательно чего-то посложнее, типа BFGS или proximal gradient. А то на хабре почти нет хороших материалов по оптимизации, а у автора явно есть хорошие знания по теме =(
UFO just landed and posted this here
Спасибо за труд, буду рад видеть продолжение.
Спасибо за статью. Могли бы вы добавить список используемой литературы?
Proximal методы — метод (пошагового) приближения, как мне кажется.
А где список литературы и ссылок? </зануда off>
Вы упомянули про диссертацию, уточните, пожалуйста, тему, если она имеет отношение к статье. Какая в ней научная новизна?
Вы несколько раз упоминаете нейронные сети, а можно поподробнее (или ещё статью) про применение методов оптимизации в этим сетям? На мой взгляд все эти сети малопригодны, т.к. по сути являются системой уравнений порядка n и годятся только для интерполяции и ближайшей экстраполяции. Структурные изменения они неспособны прогнозировать или я не прав?
К вопросу сходимости. В 1998 я применял подобные методы для экономической задачки. Получил 2 экстремума, один локальный. И градиент привёл меня сначала в локальный. Графически это примерно так выглядело (сокращены параметры до 2 + динамика).
Стохастически (монте-карло вроде бы) определил наличие глобального экстремума. А что делать если таких локальных экстремумов много? Предварительно сгладить? Понизить порядок, думаю.
А где список литературы и ссылок? </зануда off>
Вы упомянули про диссертацию, уточните, пожалуйста, тему, если она имеет отношение к статье. Какая в ней научная новизна?
Вы несколько раз упоминаете нейронные сети, а можно поподробнее (или ещё статью) про применение методов оптимизации в этим сетям? На мой взгляд все эти сети малопригодны, т.к. по сути являются системой уравнений порядка n и годятся только для интерполяции и ближайшей экстраполяции. Структурные изменения они неспособны прогнозировать или я не прав?
К вопросу сходимости. В 1998 я применял подобные методы для экономической задачки. Получил 2 экстремума, один локальный. И градиент привёл меня сначала в локальный. Графически это примерно так выглядело (сокращены параметры до 2 + динамика).
Стохастически (монте-карло вроде бы) определил наличие глобального экстремума. А что делать если таких локальных экстремумов много? Предварительно сгладить? Понизить порядок, думаю.
Список литературы добавил.
Диссертация (к. ф.-м. н.): Рандомизированные алгоритмы распределения ресурсов в адаптивных мультиагентных системах — если в кратце, то я занимался распределенной децентрализованной оптимизацией, то есть такими алгоритмами, которые не требуют какого-то «центрального» вычислительного узла, имеющего информацию о всей сети в целом.
По нейронным сетям есть замечательная экспериментальная статья здесь же на хабре. Ключевая связь между градиентными методами и обучением нейронных сетей — это так называемый «метод обратного распространения ошибки» (backpropagation). Про него мне кажется можно посмотреть вот здесь и здесь.
Формально нейронные сети — это класс функций, который теоретически умеет приближать все, что угодно (вот тут упомянуты две теоремы на этот счет, страница 4), к сожалению идеально подобрать параметры приближения — довольно сложно. При применении градиентных методов этот как раз выражается в частом застревании в локальных минимумах — это известная проблема, к сожалению какого-то универсального решения нет. Есть генетические методы, метод отжига, метод муравьиных колоний и т.п., которые частично умеют это обходить, но они требуют больше вычислений.
Диссертация (к. ф.-м. н.): Рандомизированные алгоритмы распределения ресурсов в адаптивных мультиагентных системах — если в кратце, то я занимался распределенной децентрализованной оптимизацией, то есть такими алгоритмами, которые не требуют какого-то «центрального» вычислительного узла, имеющего информацию о всей сети в целом.
По нейронным сетям есть замечательная экспериментальная статья здесь же на хабре. Ключевая связь между градиентными методами и обучением нейронных сетей — это так называемый «метод обратного распространения ошибки» (backpropagation). Про него мне кажется можно посмотреть вот здесь и здесь.
Формально нейронные сети — это класс функций, который теоретически умеет приближать все, что угодно (вот тут упомянуты две теоремы на этот счет, страница 4), к сожалению идеально подобрать параметры приближения — довольно сложно. При применении градиентных методов этот как раз выражается в частом застревании в локальных минимумах — это известная проблема, к сожалению какого-то универсального решения нет. Есть генетические методы, метод отжига, метод муравьиных колоний и т.п., которые частично умеют это обходить, но они требуют больше вычислений.
При применении градиентных методов этот как раз выражается в частом застревании в локальных минимумах — это известная проблема
Вот довольно спорно, на самом деле. Тут пишут что глобальный минимум не особо нужен при обучении ANN
Finally, we prove that recovering the global minimum becomes harder as the network size increases and that it is in practice irrelevant as global minimum often leads to overfitting
Авторы весьма авторитетны.
Спасибо за статью.
Поправьте, пожалуйста, формулы в разделе «Анализ для квадратичных функций»
x(k+1) — x* — там дальше пропущен символ градиента
И в Abs(x(k)-x*) — там изначально ведь идет произведение (I-a(k)A) для всех k?
А дальше оценка неясна — I-a — величины несоразмерные, вероятно имелось в виду I-aA? И какая норма матрицы используется? И почему lambda меньше 1? Вероятно, это следствие критерия Липшица, но я не вижу каким образом.
Понятно, что вопросы сугубо теоретические. Но хотелось бы понять, не прибегая к литературе. Спасибо.
Поправьте, пожалуйста, формулы в разделе «Анализ для квадратичных функций»
x(k+1) — x* — там дальше пропущен символ градиента
И в Abs(x(k)-x*) — там изначально ведь идет произведение (I-a(k)A) для всех k?
А дальше оценка неясна — I-a — величины несоразмерные, вероятно имелось в виду I-aA? И какая норма матрицы используется? И почему lambda меньше 1? Вероятно, это следствие критерия Липшица, но я не вижу каким образом.
Понятно, что вопросы сугубо теоретические. Но хотелось бы понять, не прибегая к литературе. Спасибо.
Поправил. Норма везде подразумевается операторная т.е. ||A||=sup ||Ax||/||x|| (x!=0), такая норма гарантирует ||Ax||<=||A|| ||x|| для всех х. Для симметричных матриц — это просто спектральный радиус, т.е. наибольшее по абсолютной величине собственное число. Если у матрицы A спектр (множество собственных чисел) на отрезке [m, L] (хотя бы 0, так как в противном случае функция не ограничена снизу, а также у вещественных симметричных матриц собственные числа вещественные), то у матрицы I-aA — на отрезке [1-aL, 1-mL]. Соответственно 1-aL>-1 если a<2/L. Если m>0, то 1-mL < 1, что верно для положительно определенных матриц, но с m=0 градиентный спуск тоже корректно работает, но чуть сложнее это показать. К слову L в этом случае как раз будет константой липшица для градиента f.
У вас хорошая публикация; как я понял, это своего рода конспект «для себя», сделанный «как для людей», и я с удовольствием собрался его проштудироапть с карандашом и тетрадью. Выделен смысл, убраны технические детали за исключением нужных. Для тех, кто не математик, а пользуется математикой для своих задач. Перед детальным анализом я, все же, посоветую: по возможности, нумеруйте формулы, чтобы к ним можно было отсылаться.
К сожалению, сейчас я обнаруживаю, что с мобильного андроидного устройства даже в десктопном режиме дальше сложно высказывать предложения (затруднения с формулами), поэтому вернусь чуть позже комментарием к этому своему сообщению.
К сожалению, сейчас я обнаруживаю, что с мобильного андроидного устройства даже в десктопном режиме дальше сложно высказывать предложения (затруднения с формулами), поэтому вернусь чуть позже комментарием к этому своему сообщению.
Вкину немного своего экспириенса :)
P.S. Текст полностью мой. Надеюсь кому-нибудь данная информация будет полезной.
P.S.S. Сорри, за косяки в тексте и корявые формулы. Возможности скинуть нормально нет :(
Метод покоординатного спуска
Идея данного метода в том, что поиск происходит в направлении покоординатного спуска во время новой итерации. Спуск осуществляется постепенно по каждой координате. Количество координат напрямую зависит от количества переменных.
Для демонстрации хода работы данного метода, для начала необходимо взять функцию z = f(x1, x2,…, xn) и выбрать любую точку M0(x10, x20,…, xn0) в n пространстве, которая зависит от числа характеристик функции. Следующим шагом идет фиксация всех точек функции в константу, кроме самой первой. Это делается для того, чтобы поиск многомерной оптимизации свести к решению поиска на определенном отрезке задачу одномерной оптимизации, то есть поиска аргумента x1.
Для нахождения значения данной переменной, необходимо производить спуск по этой координате до новой точки M1(x11, x21,…, xn1). Далее функция дифференцируется и тогда мы можем найти значение новой следующий точки с помощью данного выражения:

После нахождения значения переменной, необходимо повторить итерацию с фиксацией всех аргументов кроме x2 и начать производить спуск по новой координате до следующей новой точке M2(x11,x21,x30…,xn0). Теперь значение новой точки будет происходить по выражению:
И снова итерация с фиксацией будет повторяться до тех пор, пока все аргументы от xi до xn не закончатся. При последней итерации, мы последовательно пройдем по всем возможным координатам, в которых уже найдем локальные минимумы, поэтому целевая функция на последний координате дойдет до глобального минимума. Одним из преимуществ данного метода в том, что в любой момент времени есть возможность прервать спуск и последняя найденная точка будет являться точкой минимума. Это бывает полезно, когда метод уходит в бесконечный цикл и результатом этого поиска можно считать последнюю найденную координату. Однако, целевая установка поиска глобального минимума в области может быть так и не достигнута из-за того, что мы прервали поиск минимума (см. Рисунок 1).

Рисунок 1 – Отмена выполнения покоординатного спуска
Исследование данного метода показали, что каждая найденная вычисляемая точка в пространстве является точкой глобального минимума заданной функции, а функция z = f(x1, x2,…, xn) является выпуклой и дифференцируемой.
Отсюда можно сделать вывод, что функция z = f(x1, x2,…, xn) выпукла и дифференцируема в пространстве, а каждая найденная предельная точка в последовательности M0(x10, x20,…, xn0) будет являться точкой глобального минимума (см. Рисунок 2) данной функции по методу покоординатного спуска.
Рисунок 2 – Локальные точки минимума на оси координат
Можно сделать вывод о том, что данный алгоритм отлично справляется с простыми задачами многомерной оптимизации, путём последовательно решения n количества задач одномерной оптимизации, например, методом золотого сечения.
Ход выполнения метода покоординатного спуска происходит по алгоритму описанного в блок схеме (см. Рисунок 3). Итерации выполнения данного метода:
• Изначально необходимо ввести несколько параметров: точность Эпсилон, которая должна быть строго положительной, стартовая точка x1 с которой мы начнем выполнение нашего алгоритма и установить Лямбда j;
• Следующим шагом будет взять первую стартовую точку x1, после чего происходит решение обычного одномерного уравнения с одной переменной и формула для нахождения минимума будет, где k = 1, j=1:

• Теперь после вычисления точки экстремума, необходимо проверить количество аргументов в функции и если j будет меньше n, тогда необходимо повторить предыдущий шаг и переопределить аргумент j = j + 1. При всех иных случаях, переходим к следующему шагу.
• Теперь необходимо переопределить переменную x по формуле x (k + 1) = y (n + 1) и попытаться выполнить сходимость функции в заданной точности по выражению:
Теперь от данного выражения зависит нахождение точки экстремума. Если данное выражение истинно, тогда вычисление точки экстремума сводится к x*= xk + 1. Но часто необходимо выполнить дополнительные итерации, зависящие от точности, поэтому значения аргументов будет переопределено y(1) = x(k + 1), а значения индексов j =1, k = k + 1.
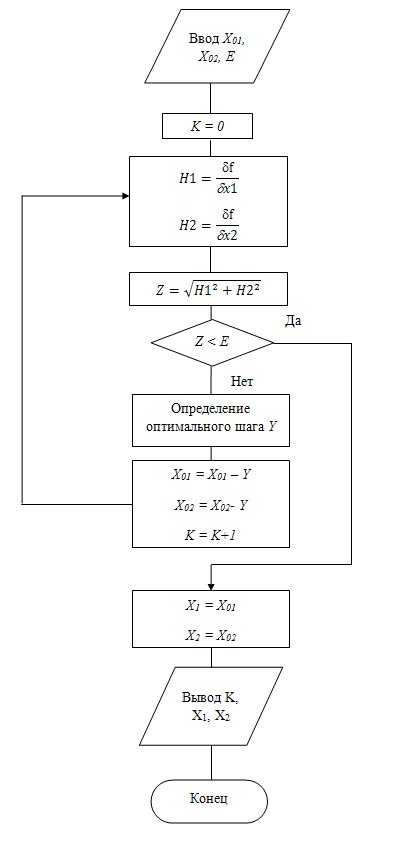
Рисунок 3 – Блок схема метода покоординатного спуска
Итого, у нас имеется отличный и многофункциональный алгоритм многомерной оптимизации, который способен разбивать сложную задачу, на несколько последовательно итерационных одномерных. Да, данный метод достаточно прост в реализации и имеет легкое определение точек в пространстве, потому что данной метод гарантирует сходимость к локальной точке минимума. Но даже при таких весомых достоинствах, метод способен уходить в бесконечные циклы из-за того, что может попасть в своего рода овраг.
Существуют овражные функции, в которых существуют впадины. Алгоритм, попав в одну из таких впадин, уже не может выбраться и точку минимума он обнаружит уже там. Так же большое число последовательных использований одного и того же метода одномерной оптимизации, может сильно отразиться на слабых вычислительных машинах. Мало того, что сходимость в данной функции очень медленная, поскольку необходимо вычислить все переменные и зачастую высокая заданная точность увеличивает в разы время решения задачи, так и главным недостатком данного алгоритма – ограниченная применимость.
Проводя исследование различных алгоритмов решения задач оптимизации, нельзя не отметить, что огромную роль играет качество данных алгоритмов. Так же не стоит забывать таких важных характеристик, как время и стабильность выполнения, способность находить наилучшие значения, минимизирующие или максимизирующие целевую функцию, простота реализации решения практических задач. Метод покоординатного спуска прост в использовании, но в задачах многомерной оптимизации, чаще всего, необходимо выполнять комплексные вычисления, а не разбиение целой задачи на подзадачи.
Для демонстрации хода работы данного метода, для начала необходимо взять функцию z = f(x1, x2,…, xn) и выбрать любую точку M0(x10, x20,…, xn0) в n пространстве, которая зависит от числа характеристик функции. Следующим шагом идет фиксация всех точек функции в константу, кроме самой первой. Это делается для того, чтобы поиск многомерной оптимизации свести к решению поиска на определенном отрезке задачу одномерной оптимизации, то есть поиска аргумента x1.
Для нахождения значения данной переменной, необходимо производить спуск по этой координате до новой точки M1(x11, x21,…, xn1). Далее функция дифференцируется и тогда мы можем найти значение новой следующий точки с помощью данного выражения:

После нахождения значения переменной, необходимо повторить итерацию с фиксацией всех аргументов кроме x2 и начать производить спуск по новой координате до следующей новой точке M2(x11,x21,x30…,xn0). Теперь значение новой точки будет происходить по выражению:

И снова итерация с фиксацией будет повторяться до тех пор, пока все аргументы от xi до xn не закончатся. При последней итерации, мы последовательно пройдем по всем возможным координатам, в которых уже найдем локальные минимумы, поэтому целевая функция на последний координате дойдет до глобального минимума. Одним из преимуществ данного метода в том, что в любой момент времени есть возможность прервать спуск и последняя найденная точка будет являться точкой минимума. Это бывает полезно, когда метод уходит в бесконечный цикл и результатом этого поиска можно считать последнюю найденную координату. Однако, целевая установка поиска глобального минимума в области может быть так и не достигнута из-за того, что мы прервали поиск минимума (см. Рисунок 1).

Рисунок 1 – Отмена выполнения покоординатного спуска
Исследование данного метода показали, что каждая найденная вычисляемая точка в пространстве является точкой глобального минимума заданной функции, а функция z = f(x1, x2,…, xn) является выпуклой и дифференцируемой.
Отсюда можно сделать вывод, что функция z = f(x1, x2,…, xn) выпукла и дифференцируема в пространстве, а каждая найденная предельная точка в последовательности M0(x10, x20,…, xn0) будет являться точкой глобального минимума (см. Рисунок 2) данной функции по методу покоординатного спуска.

Рисунок 2 – Локальные точки минимума на оси координат
Можно сделать вывод о том, что данный алгоритм отлично справляется с простыми задачами многомерной оптимизации, путём последовательно решения n количества задач одномерной оптимизации, например, методом золотого сечения.
Ход выполнения метода покоординатного спуска происходит по алгоритму описанного в блок схеме (см. Рисунок 3). Итерации выполнения данного метода:
• Изначально необходимо ввести несколько параметров: точность Эпсилон, которая должна быть строго положительной, стартовая точка x1 с которой мы начнем выполнение нашего алгоритма и установить Лямбда j;
• Следующим шагом будет взять первую стартовую точку x1, после чего происходит решение обычного одномерного уравнения с одной переменной и формула для нахождения минимума будет, где k = 1, j=1:

• Теперь после вычисления точки экстремума, необходимо проверить количество аргументов в функции и если j будет меньше n, тогда необходимо повторить предыдущий шаг и переопределить аргумент j = j + 1. При всех иных случаях, переходим к следующему шагу.
• Теперь необходимо переопределить переменную x по формуле x (k + 1) = y (n + 1) и попытаться выполнить сходимость функции в заданной точности по выражению:

Теперь от данного выражения зависит нахождение точки экстремума. Если данное выражение истинно, тогда вычисление точки экстремума сводится к x*= xk + 1. Но часто необходимо выполнить дополнительные итерации, зависящие от точности, поэтому значения аргументов будет переопределено y(1) = x(k + 1), а значения индексов j =1, k = k + 1.

Рисунок 3 – Блок схема метода покоординатного спуска
Итого, у нас имеется отличный и многофункциональный алгоритм многомерной оптимизации, который способен разбивать сложную задачу, на несколько последовательно итерационных одномерных. Да, данный метод достаточно прост в реализации и имеет легкое определение точек в пространстве, потому что данной метод гарантирует сходимость к локальной точке минимума. Но даже при таких весомых достоинствах, метод способен уходить в бесконечные циклы из-за того, что может попасть в своего рода овраг.
Существуют овражные функции, в которых существуют впадины. Алгоритм, попав в одну из таких впадин, уже не может выбраться и точку минимума он обнаружит уже там. Так же большое число последовательных использований одного и того же метода одномерной оптимизации, может сильно отразиться на слабых вычислительных машинах. Мало того, что сходимость в данной функции очень медленная, поскольку необходимо вычислить все переменные и зачастую высокая заданная точность увеличивает в разы время решения задачи, так и главным недостатком данного алгоритма – ограниченная применимость.
Проводя исследование различных алгоритмов решения задач оптимизации, нельзя не отметить, что огромную роль играет качество данных алгоритмов. Так же не стоит забывать таких важных характеристик, как время и стабильность выполнения, способность находить наилучшие значения, минимизирующие или максимизирующие целевую функцию, простота реализации решения практических задач. Метод покоординатного спуска прост в использовании, но в задачах многомерной оптимизации, чаще всего, необходимо выполнять комплексные вычисления, а не разбиение целой задачи на подзадачи.
Метод Нелдера - Мида
Стоит отметить известность данного алгоритма среди исследователей методов многомерной оптимизации. Метод Нелдера – Мида один из немногих методов, который основанный на концепции последовательной трансформации деформируемого симплекса вокруг точки экстремума и не используют алгоритм движения в сторону глобального минимума.
Данный симплекс является регулярным, а представляется как многогранник с равностоящими вершинами симплекса в N-мерном пространстве. В различных пространствах, симплекс отображается в R2-равносторонний треугольник, а в R3 — правильный тетраэдр.
Как упоминалось выше, алгоритм является развитием метода симплексов Спендли, Хекста и Химсворта, но, в отличие от последнего, допускает использование неправильных симплексов. Чаще всего, под симплексом подразумевается выпуклый многогранник с числом вершин N+1, где N – количество параметров модели в n -мерном пространстве.
Для того, чтобы начать пользоваться данным методом, необходимо определиться с базовой вершиной всех имеющихся множества координат с помощью выражения:

Самым замечательным в этом методе то, что у симплекса существуют возможности самостоятельно выполнять определенные функции:
• Отражение через центр тяжести, отражение со сжатием или растяжением;
• Растяжение;
• Сжатие.
Преимуществу среди этих свойств отдают отражению, поскольку данный параметр является наиболее опционально – функциональным. От любой выбранной вершины возможно сделать отражение относительно центра тяжести симплекса по выражению:.

где xc — центр тяжести (см. Рисунок 1).
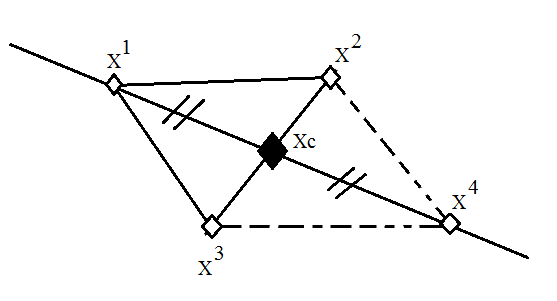
Рисунок 1 – Отражение через центр тяжести
Следующим шагом необходимо провести расчет аргументов целевой функции во всех вершинах отраженного симплекса. После этого, мы получим полную информацию о том, как симплекс будет вести себя в пространстве, а значит и информацию о поведении функции.
Для того чтобы совершить поиск точки минимума или максимума целевой функции с помощью методов использующих симплексы, необходимо придерживаться следующей последовательности:
• На каждом шаге строиться симплекс, в каждой точке которого, необходимо произвести расчет всех его вершин, после чего отсортировать полученные результаты по возрастанию;
• Следующий шаг – это отражение. Необходимо провести попытку получить значения нового симплекса, а путём отражения, у нас получиться избавиться от нежелательных значений, которые стараются двигать симплекс не в сторону глобального минимума;
• Чтобы получить значения нового симплекса, из полученных отсортированных результатов, мы берем две вершины с наихудшими значениями. Возможны такие случаи, что сразу подобрать подходящие значения не удастся, тогда придется вернуться к первому шагу и произвести сжатие симплекса к точке с самым наименьшим значением;
• Окончанием поиска точки экстремума является центр тяжести, при условии, что значение разности между функциями имеет наименьшие значения в точках симплекса.
Алгоритм Нелдера – Мида так же использует эти функции работы с симплексом по следующим формулам:
• Функция отражения через центр тяжести симплекса высчитывается по следующему выражению:

Данное отражение выполняется строго в сторону точки экстремума и только через центр тяжести (см. Рисунок 2).

Рисунок 2 – Отражение симплекса происходит через центр тяжести
• Функция сжатия вовнутрь симплекса высчитывается по следующему выражению:

Для того, чтобы провести сжатие, необходимо определить точку с наименьшим значением (см. Рисунок 3).

Рисунок 3 – Сжатие симплекса происходит к наименьшему аргументу.
• Функция отражения со сжатием симплекса высчитывается по следующему выражению:

Для того, чтобы провести отражение со сжатием (см. Рисунок 4), необходимо помнить работу двух отдельных функций – это отражение через центр тяжести и сжатие симплекса к наименьшему значению.

Рисунок 4 — Отражение со сжатие
• Функция отражения с растяжением симплекса (см. Рисунок 5) происходит с использованием двух функций – это отражение через центр тяжести и растяжение через наибольшее значение.

Рисунок 5 — Отражение с растяжением.
Чтобы продемонстрировать работу метода Нелдера – Мида, необходимо обратиться к блок схеме алгоритма (см. Рисунок 6).
Первостепенно, как и в предыдущих примерах, нужно задать параметр искаженности ε, которая должна быть строго больше нуля, а также задать необходмые параметры для вычисления α, β и a. Это нужно будет для вычисления функции f(x0), а также для построения самого симплекса.
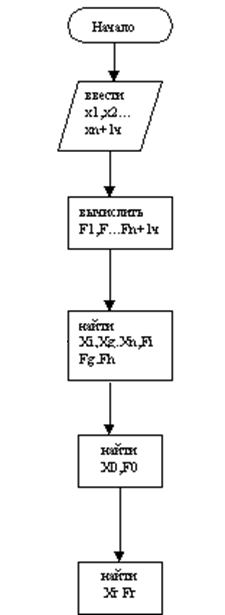
Рисунок 6 — Первая часть метода Нелдера — Мида.
После построения симплекса необходимо произвести расчет всех значений целевой функции. Как и было описано выше про поиск экстремума с помощью симплекса, необходимо рассчитать функцию симплекса f(x) во всех его точках. Далее производим сортировку, где базовая точка будет находиться:

Теперь, когда базовая точка рассчитана, а также и все остальные отсортированы в списке, мы производим проверку условия достижимости по ранее заданной нами точности:

Как только данное условие станет истинным, тогда точка x(0) симплекса будет считаться искомой точкой экстремума. В другом случае, мы переходим на следующий шаг, где нужно определить новое значение центра тяжести по формуле:

Если данное условие выполняется, тогда точка x(0) будет являться точкой минимума, в противном случае, необходимо перейти на следующий шаг в котором необходимо произвести поиск наименьшего аргумента функции:

Из функции необходимо достать самую минимальное значение аргумента для того, что перейти к следующему шагу выполнения алгоритма. Иногда случается проблема того, что несколько аргументов сразу имеют одинаковое значение, вычисляемое из функции. Решением такой проблемы может стать повторное определение значения аргумента вплоть до десятитысячных.
После повторного вычисления минимального аргумента, необходимо заново сохранить новые полученные значения на n позициях аргументов.

Рисунок 7 — Вторая часть метода Нелдера — Мида.
Вычисленное из предыдущей функции значение необходимо подставить в условие fmin < f(xN). При истинном выполнении данного условия, точка x(N) будет являться минимальной из группы тех, которые хранятся в отсортированном списке и нужно вернуться к шагу, где мы рассчитывали центр тяжести, в противном случае, производим сжатие симплекса в 2 раза и возвращаемся к самому началу с новым набором точек.
Исследования данного алгоритма показывают, что методы с нерегулярными симплексами (см. Рисунок 8) еще достаточно слабо изучены, но это не мешает им отлично справляться с поставленными задачами.
Более глубокие тесты показывают, что экспериментальным образом можно подобрать наиболее подходящие для задачи параметры функций растяжения, сжатия и отражения, но можно пользоваться общепринятыми параметрами этих функций α = 1/2, β = 2, γ = 2 или α = 1/4, β = 5/2, γ = 2. Поэтому, перед тем как отбрасывать данный метод для решения поставленной задачи, необходимо понимать, что для каждого нового поиска безусловного экстремума, нужно пристально наблюдать за поведением симплекса во время его работы и отмечать нестандартные решения метода.
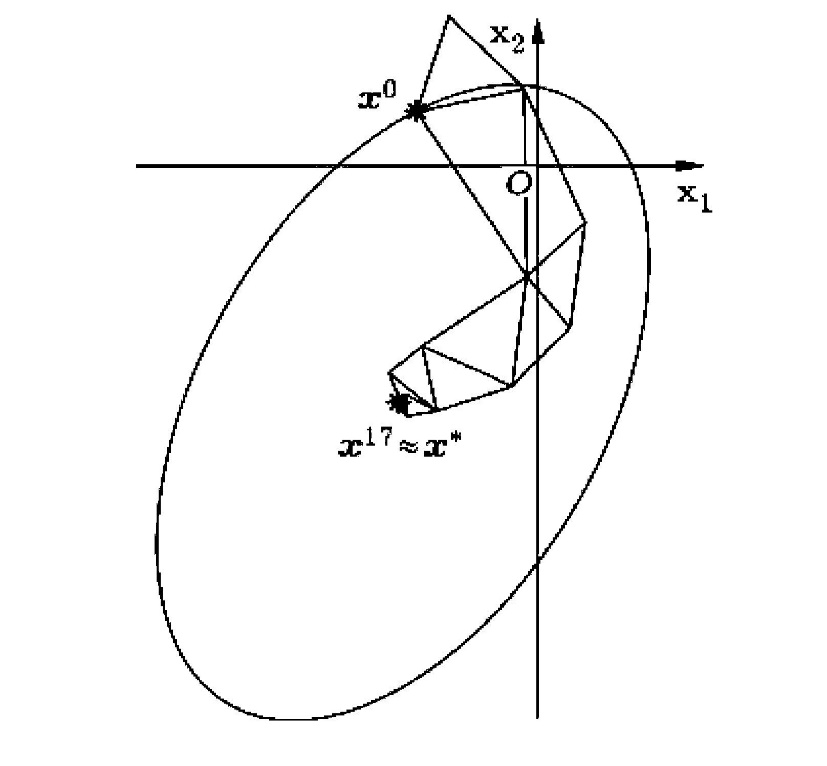
Рисунок 8 — Процесс нахождения минимума.
Статистика показала, что в работе данного алгоритма существует одна из наиболее распространенных проблем – это вырождение деформируемого симплекса. Это происходит, когда каждый раз, когда несколько вершин симплекса попадают в одно пространство, размерность которого не удовлетворяет поставленной задачи.
Таким образом, размерность во время работы и заданная размерность закидывают несколько вершин симплекса в одну прямую, запуская метод в бесконечный цикл. Алгоритм в данной модификации еще не оснащен способом выйти из такого положения и сместить одну вершину в сторону, поэтому приходится создать новый симплекс с новыми параметрами, чтобы такого в дальнейшем не происходило.
Еще одной особенностью обладает данный метод – это некорректной работой при шести и более вершинах симплекса. Однако, при модификации данного метода, можно избавиться от этой проблемы и даже не потерять при этом скорости выполнения, но значение выделяемой памяти заметно повысится. Данный метод можно считать циклическим, поскольку он полностью основан на циклах, поэтому и замечается некорректная работа при большом количестве вершин.
Алгоритм Нелдера – Мида по праву можно считать одним из наилучших методов нахождения точки экстремума с помощью симплекса и отлично подходит для использования его в различные рода инженерных и экономических задачах. Даже не смотря на цикличность, количество памяти он использует очень малое количество, по сравнение с тем же методом покоординатного спуска, а для нахождения самого экстремума требуется высчитывать только значения центра тяжести и функции. Небольшое, но достаточное, количество комплексных параметров дают этому методу широкое использование в сложных математических и актуальных производственных задачах.
Симплексные алгоритмы – это край, горизонты которого еще мы не скоро раскроем, но уже сейчас они значительно упрощают нашу жизнь своей визуальной составляющей.
Данный симплекс является регулярным, а представляется как многогранник с равностоящими вершинами симплекса в N-мерном пространстве. В различных пространствах, симплекс отображается в R2-равносторонний треугольник, а в R3 — правильный тетраэдр.
Как упоминалось выше, алгоритм является развитием метода симплексов Спендли, Хекста и Химсворта, но, в отличие от последнего, допускает использование неправильных симплексов. Чаще всего, под симплексом подразумевается выпуклый многогранник с числом вершин N+1, где N – количество параметров модели в n -мерном пространстве.
Для того, чтобы начать пользоваться данным методом, необходимо определиться с базовой вершиной всех имеющихся множества координат с помощью выражения:

Самым замечательным в этом методе то, что у симплекса существуют возможности самостоятельно выполнять определенные функции:
• Отражение через центр тяжести, отражение со сжатием или растяжением;
• Растяжение;
• Сжатие.
Преимуществу среди этих свойств отдают отражению, поскольку данный параметр является наиболее опционально – функциональным. От любой выбранной вершины возможно сделать отражение относительно центра тяжести симплекса по выражению:.

где xc — центр тяжести (см. Рисунок 1).

Рисунок 1 – Отражение через центр тяжести
Следующим шагом необходимо провести расчет аргументов целевой функции во всех вершинах отраженного симплекса. После этого, мы получим полную информацию о том, как симплекс будет вести себя в пространстве, а значит и информацию о поведении функции.
Для того чтобы совершить поиск точки минимума или максимума целевой функции с помощью методов использующих симплексы, необходимо придерживаться следующей последовательности:
• На каждом шаге строиться симплекс, в каждой точке которого, необходимо произвести расчет всех его вершин, после чего отсортировать полученные результаты по возрастанию;
• Следующий шаг – это отражение. Необходимо провести попытку получить значения нового симплекса, а путём отражения, у нас получиться избавиться от нежелательных значений, которые стараются двигать симплекс не в сторону глобального минимума;
• Чтобы получить значения нового симплекса, из полученных отсортированных результатов, мы берем две вершины с наихудшими значениями. Возможны такие случаи, что сразу подобрать подходящие значения не удастся, тогда придется вернуться к первому шагу и произвести сжатие симплекса к точке с самым наименьшим значением;
• Окончанием поиска точки экстремума является центр тяжести, при условии, что значение разности между функциями имеет наименьшие значения в точках симплекса.
Алгоритм Нелдера – Мида так же использует эти функции работы с симплексом по следующим формулам:
• Функция отражения через центр тяжести симплекса высчитывается по следующему выражению:

Данное отражение выполняется строго в сторону точки экстремума и только через центр тяжести (см. Рисунок 2).

Рисунок 2 – Отражение симплекса происходит через центр тяжести
• Функция сжатия вовнутрь симплекса высчитывается по следующему выражению:

Для того, чтобы провести сжатие, необходимо определить точку с наименьшим значением (см. Рисунок 3).

Рисунок 3 – Сжатие симплекса происходит к наименьшему аргументу.
• Функция отражения со сжатием симплекса высчитывается по следующему выражению:

Для того, чтобы провести отражение со сжатием (см. Рисунок 4), необходимо помнить работу двух отдельных функций – это отражение через центр тяжести и сжатие симплекса к наименьшему значению.

Рисунок 4 — Отражение со сжатие
• Функция отражения с растяжением симплекса (см. Рисунок 5) происходит с использованием двух функций – это отражение через центр тяжести и растяжение через наибольшее значение.

Рисунок 5 — Отражение с растяжением.
Чтобы продемонстрировать работу метода Нелдера – Мида, необходимо обратиться к блок схеме алгоритма (см. Рисунок 6).
Первостепенно, как и в предыдущих примерах, нужно задать параметр искаженности ε, которая должна быть строго больше нуля, а также задать необходмые параметры для вычисления α, β и a. Это нужно будет для вычисления функции f(x0), а также для построения самого симплекса.

Рисунок 6 — Первая часть метода Нелдера — Мида.
После построения симплекса необходимо произвести расчет всех значений целевой функции. Как и было описано выше про поиск экстремума с помощью симплекса, необходимо рассчитать функцию симплекса f(x) во всех его точках. Далее производим сортировку, где базовая точка будет находиться:

Теперь, когда базовая точка рассчитана, а также и все остальные отсортированы в списке, мы производим проверку условия достижимости по ранее заданной нами точности:

Как только данное условие станет истинным, тогда точка x(0) симплекса будет считаться искомой точкой экстремума. В другом случае, мы переходим на следующий шаг, где нужно определить новое значение центра тяжести по формуле:

Если данное условие выполняется, тогда точка x(0) будет являться точкой минимума, в противном случае, необходимо перейти на следующий шаг в котором необходимо произвести поиск наименьшего аргумента функции:

Из функции необходимо достать самую минимальное значение аргумента для того, что перейти к следующему шагу выполнения алгоритма. Иногда случается проблема того, что несколько аргументов сразу имеют одинаковое значение, вычисляемое из функции. Решением такой проблемы может стать повторное определение значения аргумента вплоть до десятитысячных.
После повторного вычисления минимального аргумента, необходимо заново сохранить новые полученные значения на n позициях аргументов.

Рисунок 7 — Вторая часть метода Нелдера — Мида.
Вычисленное из предыдущей функции значение необходимо подставить в условие fmin < f(xN). При истинном выполнении данного условия, точка x(N) будет являться минимальной из группы тех, которые хранятся в отсортированном списке и нужно вернуться к шагу, где мы рассчитывали центр тяжести, в противном случае, производим сжатие симплекса в 2 раза и возвращаемся к самому началу с новым набором точек.
Исследования данного алгоритма показывают, что методы с нерегулярными симплексами (см. Рисунок 8) еще достаточно слабо изучены, но это не мешает им отлично справляться с поставленными задачами.
Более глубокие тесты показывают, что экспериментальным образом можно подобрать наиболее подходящие для задачи параметры функций растяжения, сжатия и отражения, но можно пользоваться общепринятыми параметрами этих функций α = 1/2, β = 2, γ = 2 или α = 1/4, β = 5/2, γ = 2. Поэтому, перед тем как отбрасывать данный метод для решения поставленной задачи, необходимо понимать, что для каждого нового поиска безусловного экстремума, нужно пристально наблюдать за поведением симплекса во время его работы и отмечать нестандартные решения метода.

Рисунок 8 — Процесс нахождения минимума.
Статистика показала, что в работе данного алгоритма существует одна из наиболее распространенных проблем – это вырождение деформируемого симплекса. Это происходит, когда каждый раз, когда несколько вершин симплекса попадают в одно пространство, размерность которого не удовлетворяет поставленной задачи.
Таким образом, размерность во время работы и заданная размерность закидывают несколько вершин симплекса в одну прямую, запуская метод в бесконечный цикл. Алгоритм в данной модификации еще не оснащен способом выйти из такого положения и сместить одну вершину в сторону, поэтому приходится создать новый симплекс с новыми параметрами, чтобы такого в дальнейшем не происходило.
Еще одной особенностью обладает данный метод – это некорректной работой при шести и более вершинах симплекса. Однако, при модификации данного метода, можно избавиться от этой проблемы и даже не потерять при этом скорости выполнения, но значение выделяемой памяти заметно повысится. Данный метод можно считать циклическим, поскольку он полностью основан на циклах, поэтому и замечается некорректная работа при большом количестве вершин.
Алгоритм Нелдера – Мида по праву можно считать одним из наилучших методов нахождения точки экстремума с помощью симплекса и отлично подходит для использования его в различные рода инженерных и экономических задачах. Даже не смотря на цикличность, количество памяти он использует очень малое количество, по сравнение с тем же методом покоординатного спуска, а для нахождения самого экстремума требуется высчитывать только значения центра тяжести и функции. Небольшое, но достаточное, количество комплексных параметров дают этому методу широкое использование в сложных математических и актуальных производственных задачах.
Симплексные алгоритмы – это край, горизонты которого еще мы не скоро раскроем, но уже сейчас они значительно упрощают нашу жизнь своей визуальной составляющей.
P.S. Текст полностью мой. Надеюсь кому-нибудь данная информация будет полезной.
P.S.S. Сорри, за косяки в тексте и корявые формулы. Возможности скинуть нормально нет :(
Кстати с покоординатным спуском такая история: вроде как он очень хорош для функций, у которых частные производные считать существенно проще, чем весь градиент (например как раз для квадратичных).
— Если выбирать случайно, то он становится частным случаем SGD, но специфический, для него действуют не только плохие оценки SGD, но и хорошие обычного градиентного спуска. Ключевой момент — для SGD точка минимума может меняться в зависимости от реализации неизвестной случайной величины, а для покоординатного не может. Самый простой пример f(x)=E||x-w||^2, w — с.в. f достигает минимума в Ew, соответственно найти приблизительно минимум — равносильно нахождению приближенного мат. ожидания по наблюдениям, вроде как быстрее, чем C/ sqrt(N) (N — кол-во наблюдений) не получить. В покоординатном спуске такого эффекта не будет.
— Говорят, что довольно эффективно выбирать координату с наибольшей по абсолютной величине производной. Вроде бы это один из немногих методов, которые я видел, где «узкое место» — это RMQ (для выбора координаты).
Метод Нелдера-Мида не использует градиент в принципе, вроде как он хуже градиентных, зато он применим на большем классе задач, например в reinforcement learning.
— Если выбирать случайно, то он становится частным случаем SGD, но специфический, для него действуют не только плохие оценки SGD, но и хорошие обычного градиентного спуска. Ключевой момент — для SGD точка минимума может меняться в зависимости от реализации неизвестной случайной величины, а для покоординатного не может. Самый простой пример f(x)=E||x-w||^2, w — с.в. f достигает минимума в Ew, соответственно найти приблизительно минимум — равносильно нахождению приближенного мат. ожидания по наблюдениям, вроде как быстрее, чем C/ sqrt(N) (N — кол-во наблюдений) не получить. В покоординатном спуске такого эффекта не будет.
— Говорят, что довольно эффективно выбирать координату с наибольшей по абсолютной величине производной. Вроде бы это один из немногих методов, которые я видел, где «узкое место» — это RMQ (для выбора координаты).
Метод Нелдера-Мида не использует градиент в принципе, вроде как он хуже градиентных, зато он применим на большем классе задач, например в reinforcement learning.
Sign up to leave a comment.
Обзор градиентных методов в задачах математической оптимизации