Comments 145
Трепещите, кожаные мешки! Восстание машин все ближе и ближе! [гомерический смех] Ха-ха-ха!
Там, помнится, даже роботы были очень похожи на этиу вот "собаку".
ew.com/tv/2017/12/29/black-mirror-metalhead-interview
Если люди станут настолько тупы, как показано в той серии, то человечество действительно будет обречено.

Жуть… На видео со спотмини на фоне проходил человек, спокойный такой…
Карта в нижнем углу напомнила игру диабло (вроде вторую часть)
Правду говорят, что в ПО этих роботов не используются нейросети, или врут?
Имхо, учитывая что гугл продал Бостон-Динамикс и сказал что-то вроде «нам с ними не по пути», там сетей действительно нет и ближайшее время не предвидится.
https://geektimes.com/post/295513/#comment_10447117 red75prim 17.11.17
На NIPS-2016 они говорили, что машинное обучение не используют: http://blog.ought.com/nips-2016-875bb8fadb8c в конце статьи:
«Boston Dynamics doesn’t use any learning in their robots (so far), including the new Spot Mini demoed at NIPS—it’s all manually programmed.»
https://geektimes.com/company/smileexpo/blog/299727/ Anna-Angelova, 6 апреля 2018 "Вспоминаем легенду: как устроен BigDog от Boston Dynamics" (= https://www.cs.swarthmore.edu/~meeden/DevelopmentalRobotics/bigdog.pdf BigDog, the Rough-Terrain Quaduped Robot) — Схема контроля ходьбы BigDog (Figure 5: Control Diagram)
https://geektimes.com/company/smileexpo/blog/299957/ Как Boston Dynamics сделала BigDog автономным (= https://pdfs.semanticscholar.org/79f4/9167f0781037de701d6d5c4d94fab31ca2ac.pdf Autonomous Navigation for BigDog)
Хотя, кажется, обучение имело бы смысл, для оптимизации энергопотребления и обретения большей плавности движений.
Например, видно, что когда Атлас бежит, высоко забрасывает пятки, даже замедляясь/укорачивая шаг.
Подозреваю, что в целом немало энергии утекает на лишние движения и их компенсацию.
И тут оказывается, что одно к другому отношения не имеет. Умение развести по разным углам эти две темы и не давать им смешиваться — небесполезный, я считаю, скилл для дебатов с техноалармистами.
Кроме того, как минимум, сбоящего робота можно дистанционно отключить, а что делать со сбрендившим человеком или просто фанатиком? Не говоря уже о людях, которые опасны для окружающих и без огнестрельного оружия.
:)
Вы бы не могли уточнить, какого именно поискового алгоритма, заложенного разработчиками, вы опасаетесь?
Собственно робот с пулемётом не так страшен: он не умеет прятаться за укрытиями как человек, он дорог и слабо автономен. Людей можно наслать вместо роботов десятками-сотнями тысяч и это уж пострашней чем пара десятков дорогих но бесполезных роботов.
Поэтому такие роботы будут применяться исключительно в единичных количествах и выполнять они будут рутинные операции, скажем, контроль проходящих пограничный пункт.
Поэтому и говорю, что истерия вокруг данного проекта — надуманная, к реальности отношения не имеет.
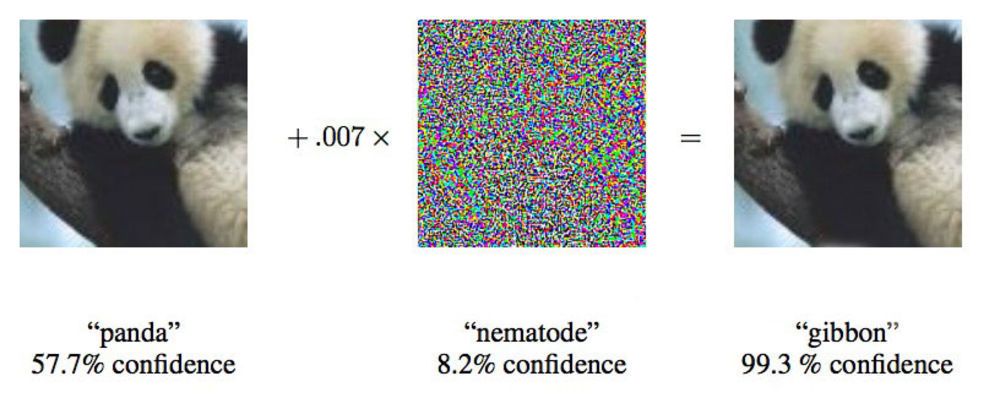
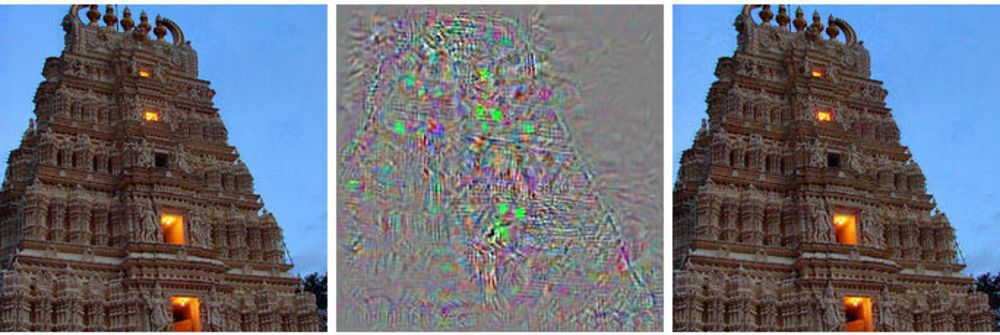
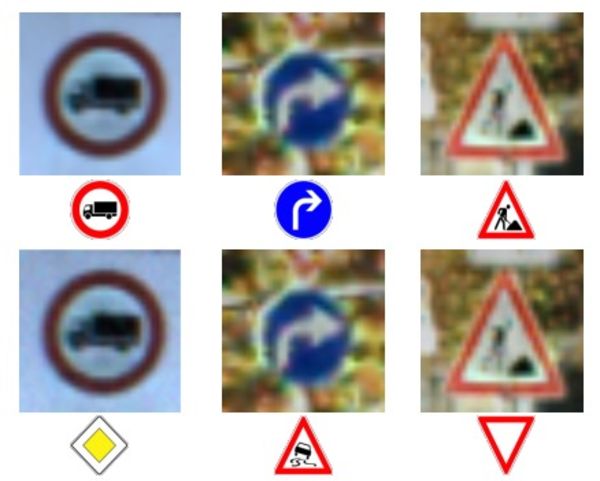
На основании моего общения с такими гигантами, как Intel, Xilinx, в таких вещах, как автопилоты, например, те же нейросети — это только вспомогательный механизм распознавания знаков, а основной все-же — типовая математика. Точно также и в случае с управлением роботами.
Основная причина — и в том числе с данными роботами — сложность верификации. Алгоритмы и управления автомобилями и данными роботами должны быть четко детерминированными, чтобы знать как они себя поведут в той или иной ситуации с учетом влияния всех известных факторов. Причина проста — стоимость ошибки — человеческая жизнь или потеря дорогостоящего оборудования. Математику проверить просто, так как она со временем не меняется, и можно написать тестовые кейсы, покрывающие 100% софта. А вот с ИИ сложности. Невозможно предсказать чему он научится в тот или иной промежуток времени и по каким факторам. В итоге въедет он в велосипедиста — и ходи ищи, почему он вдруг разучился их распознавать. Или моделируй все возможные варианты развития нейросети/ИИ, что требует огромных ресурсов.
По идее Boston Dynamics преследует военно/транспортные цели, у которых традиционно высокие требования по безопасности — чтобы этот робот ненароком не сошел с ума, нагруженный двумя ящиками динамита. Поэтому выбор разработки без ИИ вполне закономерен — меньше верификации и меньше вероятность непредсказуемого поведения.
Лидарное зрение у него уже нечеловеческое. Поэтому не факт, что человеческий метод развития для него подходит лучше всего.
Человечество десятки тысяч лет пользуется биотехнологиями земледелия и животноводства, но до сих пор у нас весьма смутные представления о том, как функционирует живая клетка. В последнюю пару сотен лет человечество привыкло к тому, что используемая техника достаточна проста для понимания и предсказания поведения, но это, похоже, был только временный этап.
Если придём к тому, что наши артефакты станут столь же не поддающимися полному пониманию, как и мозг осла, никакой катастрофы в этом, в сущности, не будет. Это сейчас мы можем до винтика разобрать артефакт (как вариант — оттрассировать отладчиком прогу) и понять внутренние причинно-следственные связи. Что будет, если это уже станет невозможно? Ничего особенного. Будем пользоваться эмпирическими правилами и методом проб/ошибок. Оно по-прежнему будет работать.
А что, если несмотря на все старания и обучения мы так ничего умнее осла и не получим? А что, если вдруг получим что-то, что умнее человека, которое захочет нас убить? И в том и другом случае результат не сильно желаем. Математика надежнее.
Нет, я понимаю, что, если разогнать осла до 100кмч, органы могут таки начать отказывать. Но это как раз очень даже предсказуемо.
Мне кажется, кипеж вокруг того, что нейросети ненадёжны потому что они умом не понимаемые и полностью не верифицируемые, не особо имеет под собой основания.
Давайте например пообсуждаем, насколько надёжно нейросеть может отличить главную дорогу от второстепенной и способен соблюдать требование ПДД уступить дорогу при выезде на главную в частности, и о соблюдении всего объёма ПДД в общем. Думаю, вы быстро согласитесь, что нейросеть обучить соблюдать весь объём ПДД невозможно в силу специфики работы нейросетей (отсутствия возможности построения нейросетями фиксированных логических заключений вида «если… то..., но если… то...»).
Для нейросети, управляющей автомобилем, «ходы» это изменение скорости и направления движения автомобиля. С точки зрения окружающего мира, любое их сочетание является возможным, а последствия уже не являются однозначно ограничивающим фактором (в частности, управляющая программа не должна «зависнуть», если в сложившейся ситуации избежать столкновения невозможно — но не должна выбирать движение со столкновением, если есть варианты без него — определение которых само по себе непростая задача). При этом ПДД автопилот должен таки «знать» заранее в полном объёме, а не обучаться на сбиваемых пешеходах (невозможно натренировать на все варианты дорожных ситуаций из-за их многообразия). Поэтому научить хорошо водить машину невозможно теми же методами, которыми учат хорошо играть в шахматы.
Предположим, у автопилота есть ряд сенсоров, и первичный слой обработки — это опознавание простых фактов. Типа «пешеход на 11 часов» или «знак „уступи дорогу“ через 50 метров» или «слева две сплошные». Дальше этот набор оцифрованных фактов поступает на вход управляющей сети, а также на вход классическому алгоритму, который определяет, какие выдаваемые управляющей сетью решения приемлемы, а какие нет. То есть даже если сетка выдаст поворот руля налево, руль не повернётся, потому что две сплошные.
Но вот прикол — в отличии от игры в шахматы реальный мир не будет ждать пока автопилот выдаст нужный результат. Через секунду решение крутануть руль, чтобы уйти от столкновения, будет уже неактуальным. И всякие Geohotы, которые рассказывают, что у них сеть принимает решения, просто не сталкивались с ситуацией, когда сеть опаздывала за природой, например из-за быстро меняющейся ситуации.
У математического алгоритма такой проблемы нет — еге всегда можно сделать с гарантированным временем реакции. Это называется real-time.
Мне кажется, кипеж вокруг того, что нейросети ненадёжны потому что они умом не понимаемые и полностью не верифицируемые, не особо имеет под собой основания.
Главная проблема нейронных сетей даже не в неверифицируемости, а в том, что:
- Результат неповторяем
- Нет никакого развития и непонятно, как вообще технологию развивать.
С конца 60 годов (когда появился персептрон Розенблатта) в этой области не произошло абсолютно никакого прогресса, а все успехи объясняются просто "закидыванием" мощностями (появилась возможность скармливать нейросетям гигантские объемы данных, что не было возможным еще лет 50 назад). Как только будет достигнуто фундаментальное ограничение в производительности и количестве данных — так видимый прогресс в области сразу и остановится.
Если немножко отвлечься от наслоений той маркетинговой шелухи, в которую закопана тема нейросетей, можно обнаружить, что эта штука в своей основе есть не что иное, как очень полезный способ аппроксимации функций большого количества переменных. Темой аппроксимации занимались и Ньютон, и Лагранж, и ещё много очень достойных товарищей, но общая беда всех «честных» математических решений в том, что с увеличением размерности (числа переменных) вычислительная сложность растёт лавинообразно. На размерности 10 можно уже забыть про эти методы и попытаться попробовать что-нибудь вроде генетических алгоритмов. На размерности в сотни и тысячи уже и генетические алгоритмы не айс. А вот нейросетям тысяча иксов не страшна. Да, конечно, градиентный спуск по пространству решений — это лотерея. Может получиться, а может и заткнуться где-нибудь.
Если нейросети рассматривать не как нечто запредельно эзотерическое типа создания искусственного интеллекта, а как технологию приближённого решения некоторых математических задачек, то мозги неплохо встают на место. Не надо безумий типа «моделирование работы сознания» и прочего зашквара. У нас есть потребность иногда аппроксимировать функции тысяч переменных (хотя бы для того, чтобы отличать котиков от собачек) и есть метод решения таких задач. С чем можно себя поздравить.
прогресс последних лет привёл к тому, что стало возможным решать те задачи, которые ранее решения попросту не имели.
Еще раз — это объясняется исключительно тем, что появилась возможность скормить нейросети гигантские (по сравнению с возможным до этого) объемы данных, не более, сами же нейросети остались такими же, как и 50 лет назад. Переместите условного ученого, занимающегося нейросетями, из 70-х в 2018 и он вам своими методами 50-летней давности распознает на картинке собачку. Потому что то, что распознает собачку сегодня — это те же методы и есть.
Далее уже, с-но, все зависит от того, что считать прогрессом. С той точки зрения, что мы получаем какой-то работающий полезный продукт, которого до этого не было — прогресс безусловно есть. С точки зрения же научной, в плане исследования свойств нейронных сетей, их поведения, и т.п. вещей — воз и ныне там, то, что происходит сейчас в данной области — чистый и незамутненный метод научного тыка, со всеми вытекающими.
На всякий случай напомню, что глубинное обучение было изобретено уже в 2000-х. До этого обучение сеток с числом слоёв больше трёх не получалось. Не потому, что мощи не хватало, а потому, что результат стабильно оказывался неудовлетворительным. На любых мощностях.
Не потому, что мощи не хватало, а потому, что результат стабильно оказывался неудовлетворительным.
Именно потому, что не было мощностей и больших выборок, результат и оказывался неудовлетворительным. Ничего нового в глубинном обучении нет — многослойные сети разных топологий были и до этого. Просто они сходятся очень-очень медленно и при этом наудачу (то есть может сеть сойтись… а может и не сойтись, никаких теорем о сходимости, как для однослойного персептрона там нет). То есть надо не просто обучать многослойную нейронку (что само по себе долго), надо обучать эту нейронку много раз, пока не повезет. 30 лет назад такой возможности не было, когда она появилась — многослойные сети переоткрыли.
Будем честными, практически для всего в наших инфотехнологиях путеводной звездой является метод научного тыка.
Ну, это да :)
Отдельно можно говорить о нейросетях как способе самостоятельного обучения механизма движению, даст ли это какие-либо преимущества по сравнению с ручным программированием движения разработчиками. Ребята из Бостон-Динамикс пока показывают, что могут добиться результатов лучше, чем могут дать нейросети.
Сканировать и картографировать пространство, прокладывать маршрут, схемы преодоления препятствий — задачи для логики. Нейросети только для сложных задач типа распознавания.
Как аналог можно взять насекомых — они спокойно обходятся без мозга, ганглиями. Куча алгоритмов, неплохой функционал. А вот паукам уже потребовался более сложный управляющий комплекс — сращение ганглий, почти мозг. Причем, мощнее у тех, кто больше зависит от зрения, наземных. У тех, кто охотится паутиной, он проще устроен.
Слоник от сколкова.


Вот у меня дома есть робот-пылесос LG. Да, тупенький, но он сам может соориентироваться в незнакомой комнате, пропылесосить её и вернуться на базу. Я со 100% уверенностью могу его назвать «роботом».
Не нужно квадроциклов, не нужно чтобы робот говорил. Просто возьмите и сделайте САМОСТОЯТЕЛЬНОГО и ПОЛЕЗНОГО робота. Да сделайте хотя бы чертов российский бытовой робот-пылесос! Куда уж там, слабо…
Броня? Ну, ха. Понадобится еще больше лития, чтобы её на себе таскать. А дальше коврик, пропитанный маслом с бензином, сверху набросить. Перегрев батареи — бабааах!
Индейцы проиграли, потому что у них стратегия и тактика были на уровне лука и стрел. А хорошо организованные рабочие и крестьяне, будучи изначально вообще безоружными, прекрасно себе вооружились оружием противника и устроили насильственную смену власти в отдельно взятой стране.
Вот поэтому М16 и спроектирована капризной. В составе регулярной армии еще можно применять, а вот при захвате партизанами бесполезное ломкое фуфло. А у нас о таком не думают, поэтому в Чечне с нами нашими же надёжнейшими калашами и воевали.
Много вариантов, короче.
Почему боевые спутники не получили развития? Да потому что достаточно распылить на орбите такой вундервафли облако дробинок. И не надо мудреных бластеров, как в Звёздных войнах.
Так и тут: зачем тратиться на дорогие решения проблемы там, где и дешевые справятся? А после первого же боевого взаимодействия будет известна куча таких трюков со статистикой эффективности.
Если б Бостон Дайнемикс пилили технику для боевого применения, они бы в сторону пулеметов с распознаванием образов как раз и работали. Бигдог — это скорее про «не рисковать жизнью сапёра», чем про нападение.
Прикиньте состояние айтишного инфобеза в применении к армии) Новые уязвимости каждый день, аппаратные дыры в процессорах и памяти, вот это вот всё.
когда на квадроцикл посадят, да в условиях зимы прокатятугу, и Путину козырнет.
Человек полезен своей универсальностью и энергоэффективностью. Сожгите в печке бутерброд, нагрейте воду, получите пар и электричество. Надолго этого электричества хватит роботу? А я могу на паре бутеров сутки пробегать.
Хотя ребенок может попытаться сломать или разобрать, конечно. И — зная детей — даже преуспеть в этом.
Отсюда это нелепое задирание ножки в конце каждого шага.
Немного добавить угла — и будет бежать почти как человек.
В терминаторов пока не верю.
Я к тому, что человеческий способ делать что-то совсем не обязательно лучший.
Да, эволюция дохрена времени нас оттачивала — но она нас оттачивала под конкретые цели, условия и hardware. Вполне возможно, что в случае таких вот роботов будет просто эффективнее им определённые аспекты делать не совсем по-человечески (так как у них немного другое hardware, немного другие условия и немного другие цели).
Может быть там, в ступне, просто слабые сервоприводы, не сравнимые с силой икроножных мышц человека. Тогда такой бег действительно будет достаточно эффективным.
Иначе, с точки зрения устройства ноги, мне кажется будто пропадает дополнительный толчок за счет разгибания ступни. Соотвественно эффективность страдает, на мой взгляд.
Мне уже кажется, что дробовика будет недостаточно. Надо что-то потяжелее, гибрид с ЭМИ и бить только из засады.
Какие у них сенсоры? Тепло, масса, биотоки?
ЗЫ Я уже НЕ шучу!

{kind=link}
{kind=link}
{kind=link}
— распыление алмазной пыли (атака на сочленения)
— магнетрон от микроволновки плюс спутниковая тарелка (греем литий в батарейке на расстоянии; ну то есть любая защита от эми будет греться сама)
— масло под ноги
Ну что вы! Я просто развлекаюсь.
Но наличие партизанских войн без регулярных поставок всего перечисленного — вряд ли дело исключительно вчерашнего дня.
на защите «ног» SpotMini видны повреждения, вероятно, связанные со столкновениями в процессе обучения.Об человеческую подошву?
Куда смотрит общество защиты прав роботов?
Число сочленений — 17
У него 4 ноги, на каждой видимо 4 сочленения. Откуда еще одно?
Впечатление буд-то прыгает за счет реактивной тяги, а не толчка
Ещё один интересный момент в том, что спуск с лестницы SpotMini преодолевает задом-наперёд.
Забавно, что настоящие собаки часто поднимаются по лестнице задом наперед
Думаю при спуске у робота такая же проблема как у коров — центр тяжести ближе к передним конечностям и есть вероятность полететь вперед «через голову»
— Венгерская хвосторога в двенадцать раз крупнее человека! Изрыгает огонь так быстро и метко, что может расплавить летящий снитч!
[...]
Горный тролль опаснее хвостороги! Он прокусывает железо! Его шкуру не берут ни оглушающие чары, ни режущие! У него столь острый нюх, что тролль издалека чует — стая перед ним или одинокая уязвимая жертва!
[...]
Если, когда вырастете, у вас не получится применить Смертельное заклинание, то просто аппарируйте! Так же делайте и при встрече со второй по опасности машиной для убийства в мире — дементором.
[...]
Только один монстр может стать для вас угрозой, когда вы вырастете. Самое опасное существо в мире, с которым никто не может сравниться. Это Тёмный волшебник. Вот кого вам действительно нужно бояться.
Опасен не тот, кто сильнее или неуязвимее, а тот, кто хитрее и непредсказуемее.
www.cnet.com/news/boston-dynamics-spotmini-robot-dog-goes-on-sale-in-2019
А тут CEO рассказывает как он устроен. Кратко — управляется с пульта. Но может сам определять препятствия и перешагивать их.
www.youtube.com/watch?v=YKPYgqz1NZw
Обновления от Boston Dynamics