Comments 346
Банальный индикатор: посмотрите на количество пиров на трекерах на один и тот же фильм в 3D и просто в хорошем 1080. И это не из-за слабой распростанённости девайсов, ведь даже 4К-контент тянут лучше, чем 3D
нет, полезная вещь, только и смотрю фильмы в 3Д
в дополнении с звуком — улёт! круче чем в любом кинотеатре (том же имаксе)
55" 4К и реально перевес в пользу 3Д, у знакомых у которых 1080 как раз наоборот все.
нет, полезная вещь, только и смотрю фильмы в 3Д
Да понятно, на вкус и цвет, вот только тем, кому реально нравится — меньше. Остальным либо пофигу, либо просто неприятные ощущения.
проблема тут только в цене
менталитет в России один, лучше я на торренте скачаю, следовательно лицуха не дешевая на взлёте продаж и не всё есть
так же само оборудование не из дешевых, не каждый может для себя понять, зачем покупать: ТВ + ресивер + акустику (весь набор), да и разбираться/настраивать всё это надо.
https://en.wikipedia.org/wiki/List_of_3D_films
У меня вообще складывается впечатление, что сейчас 3D фильмов снимается больше, чем «обычных».
У меня вообще складывается впечатление, что сейчас 3D фильмов снимается больше, чем «обычных».На сколько знаю, они почти все снимаются в 3D, остальные форматы монтируются побочно.
Поэтому в основном 3Д снимают для проката в кинотеатры, а для домашнего просмотра обычное 2D.
Скажите честно, вы все 3Д фильмы купили?
За цену одного 3д телевизора в 40 дюймов можно купить 3 таких же без 3д.
Дальше подробнее расскажу о первой проблеме — датчиках.Это в следующем посте, или вы случайно не дописали?
А то как-то быстро оборвалось…
Есть такая коварная бессердечная статистика, которая говорит об обратном — белковые выпускники автошкол больше похожи на леммингов из известного фейка.
По разным оценкам (и британских ученых тоже) разрешение глаза от 150 до 500 мегапикселей, то есть наш мозг умеет в реалтайме обрабатывать поток со стереокамеры 150 мегапикселей 25 кадров в секунду.
Для сравнения — железный блок, который умеет в реалтайме обрабатывать поток с 4 стереокамер, пусть даже каждая из которых Full HD, выглядит так
И это всего 8 мегапикселей получается.
Итого разница на два порядка, а на самом деле больше: человек имеет возможность сканирования, голову поворачивает.
Поставьте человеку в кабину вместо стёкол три монитора (центральный и по бокам), даже не HD, а снаружи камеры, и он спокойно проедет. Аккуратнее чем обычно с непривычки, но проедет.
Вы посмотрите, что вытворяют люди на спортивных дронах с FPV :)
Что касается экранов внутри — я и не спорю, что человек поедет. Точно так же, как и автопилот, то есть медленно и аккуратно, вставая в хоть немного сложных ситуациях.
Избыточность получаемой информации, пусть его выражает разрешение, очень важна. Например, даже при сужении поля зрения при движении на высокой скорости позволяет различать вдали предметы. Позволяет видеть что-то периферическим зрением. Да много что позволяет.
И все это с минимальным лагом поступления картинки в мозг и обработки. Компьютерное изображение с камер пока еще процессится долго.
я и не спорю, что человек поедет. Точно так же, как и автопилот, то есть медленно и аккуратно, вставая в хоть немного сложных ситуациях.
выпускник с правами доедет из центра Москвы до своей дачи. Ни один в мире автопилот — нет.Так проедет или нет? :)
Я согласен, что на данном уровне развития — скорее нет. Точнее, проедет, если очень-очень повезёт. Но дело не в дорогущих датчиках, а именно в алгоритмах, и железе, способном их переварить.
Получается, для экранов всю нашу нейросеть, все рефлексы надо переучить. А то езда только «от сознания» получается, как первый раз за рулём.
Но доехать, конечно, может получиться, если на дороге будет тишина и безмятежность.
Линзами это переворачивание верх-низ. И мозг к такому по-идее "от природы" готов, т.к. и так с рождения видит перевернутую картинку и "программно" ее разворачивает в правильное положение. Надо просто перестать это делать и обрабатывать "напрямую".
Были еще опыты именно с зеркалами, чтобы инвертировать картинку по оси лево-право или скажем повернуть все изображение под углом в 45 градусов и озадачить мозги проблемкой, с которой он в природе не сталкивался (в отличии от переворота изображения от линзы глаз). И к таким вывертам мозг тоже мог адаприроваться и через какое-то время человек начинал видеть все нормально, хотя в глаза приходила картинка в зеркальной инверсии или повернутая вбок по диагонали.
P.S.> со своими -13 тоже без очков и ходить могу, не обнимаясь со столбами, и даже иной раз людей узнавать издали, но ошибок многовато для комфортной жизни.
Параллакс нам важен.Расстояние между глазами около 10см, две фронтальных камеры можно расположить на 2м друг от друга. Параллакс в 20 раз круче обеспечен. И это только две, их спереди можно и больше поставить, если потребуется, так как цена на них не так уж и высока.
Да, а переучить наш мозг на другую стереобазу быстро не выйдет, я думаю.
Ехать-то сможет, только гораздо медленнее и аккуратнее. И если не будет нештатных ситуаций. Слишком много потеряется. Я рулил с ноутбука радиоуправляемой газелькой по камере — всё не то и всё не так, даже после долгих тренировок. Доедет — да, «спокойно» — только применительно к скорости.
Эти домыслы мозга на основании старого опыта, боюсь, неточны будут.Да, я именно об этом.
Добавляем к этому опыту ещё один глаз + 360 обзора + свободу головы на полметра — получаем идеального белкового водителя.
Такой же поток информации для автопилота обеспечат всего 4 камеры (даже больший, т.к. они не «сканируют» участок поворотом «головы», а снимают одновременно). Добавим сюда другие недорогие датчики, типа дальномеров, акселерометров, навигаторов, возможности «видеть» в других диапазонах — всё, по входной информации мы на порядок
переплюнули человека. Осталось всё это переварить…
В момент когда отдача на капиталловложение в грубую компьютерную силу станет меньше чем в алгоритмику ситуация изменится.
Ну и да не забываем, что в 2012-ом году впервые интеллектуальные леменги ломанулись в свёрточный нейросети и вот мы здесь, а компьютер знаки различает лучше человека, например.
Сейчас, если вы присмотритесь к новостям, интеллектуальные леменги, такие как и, собственно, ломапнулись в рекурентные сети. Ни сколько не удивлюсь, если вопрос динамического коридора, сводящийся к накоплению контекста, через 4 года будет решаться из коробки несколькими готовыми пакетами. Так же как задачи безошибочного распознования голоса при отношении «сигнал/шум» в пользу шума. Так же как и вопросы былых фур на фоне светлого неба. Нейросеть, неуверенная что именно она увидела в доступном ей разрешении будет «вглядываться» в картинку высокого разрешения, и помечать сомнительный объект.
Пока что на средней дистанции реальным ограничением будут не нейросети. Потолок их развития на данном этапе пока что не прощупывается.
А вот остальные аргументы про цену и тому подобное — тут я с вами полностью согласен.
Вероятностный подход, который я так понимаю близок нейросетям, здесь не очень применим, автопилот должен быть уверен в безопасности маневра (если только отказ от маневра не станет еще более опасным).
Так что, имея данные о расстоянии и картинку, можно легко всё посчитать.
Вопрос остаётся за малым: определить где именно на картинке авто, а где нужный просвет. Вот тут, походу, и придётся изучать всякие умные слова.
Ну и самый главный вопрос: а зачем автопилоту эти данные? Не думаю, что он когда-нить будет рассчитан на агрессивную манеру езды (вклиниться между потоками на перекрёстке, т.к. на работу опаздывает) или устанавливаться на машины скорой помощи, полиции или МЧС.
пы.сы. Не знаю, как там в европейской части России, но в тех городах, где я бывал за Уралом, нужен беспилотный Камаз, создатели которого утверждают, что он ништяк справляется с российскими дорогами. Но я чё-т не хочу менять камри на камаз…
Играя в компьютерный симулятор человек использует максимум 8 мегапикселей (у меня монитор всего на 2) своего зрения (остальная инфа — шлак). А скорость происшествий в симуляторе куда выше чем в реальности (не каждый день разгоняешься на феррари до 300 или отбиваешься от толпы монстров). Так что да — человек круче компа. И нет, система распознавания образов для вождения не нуждается в камере в 500 мегапикселей цветного зрения. Для автоматического парктроника хватает и вовсе 20 пикселей.
Не понимаю, причем тут симулятор и крутость компа. Я же привожу ссылку выше — в нормальных симах, а не аркадах, ИИ выбивает профессионального человка.
Насчет CS-ботов — да, они обычно читят. Кстати, а есть популярные игры, в которых можно написать скрипты для ботов?
Я не про то: когда в симе или аркаде смотришь через 2 мегапикселя, то этого хватает чтобы безаварийно ехать даже с превышением скорости, не то что по правилам.
Нет никаких 150 мегапикселей. Это всего-лишь "программная эмуляция" в мозгу, а не реальные характеристики глаз.
При цветном(дневном) зрении поток информации от глаз единицы мегапиксей на "кадр". Которые еще и очень сильно сжимаются с большими потерями еще до того, как их начнут обрабатывать зрительные центры мозга. Поток информации по зрительным нервам доходящим до мозга сравним 1 мегапикселем на кадр.
Такое удельное разрешение достигается только в очень узкой области (1-2 объемных градуса) на которых сфокусирован в данный момент взгляд. А потом мозг из довольно мутной общей картинки + выхватываемых выборочно по очереди маленьких кусочков центрального острого зрения с высоким разрешением создает иллюзию того, что все вокруг видим с подобным высоким качеством. Но это лишь иллюзия ("програмная эмуляция")
В результате если долго рассматривать статичную картинку — когда глаза и мозг могут ее долго "обшаривать" и потом из кучи отдельных четких кусочков склеить в мозгу детализированную картину — глаза существенно превосходят современные камеры (хотя в этом случае сравнивать с видеокамерой вообще некорректно — аналогом будет фотоаппарат, а не видеокамера). А вот в динамике — т.е. восприятия быстро меняющегося изображения возможности глаз и зрительного нерва даже до приличной FullHD камеры не дотягивают. Всю остальную "магию" творят алгоритмы обработки (биологические нейронные сети мозга).
Да, потому что области центрального наиболее острого зрения (которое нужно если на изображении много мелких деталей) разрешение глаза вообще порядка 30килопикселей (0.03 мегапикселя), т.е. даже картинку в 640х480 за раз (один "снимок"/"кадр") глаз передать не может — только где-то 1/10 с максимальным качеством, а все остальное с довольно низким дающим только общее представление о том, на что смотришь. В теории нужно минимум 10 "снимков" с небольшими смещениями глаз после каждого, чтобы просканировать такое изображение с максимально возможным качеством и собрать в мозгу полную картину.
На практике — еще в разы больше, т.к. области "сканирования" идут с перекрытием(наложением) друг на друга, да и алгоритм выборки(как маленькими кусочками покрыть всю площадь) очень далеки от оптимальных.
Частично спасает только то, что глаза это делают весьма быстро и неосознанно — человек обычно даже не замечает, что у него глаза на самом деле постоянно немного прыгают вокруг той точки в которую он смотрит и "обшаривают" окрестности зоной максимальной остроты зрения.
Наверное случалось с многими:
Вы плавно тормозите перед светофором в потоке машин. Аккурат под конец вашего торможения весь поток плавно начинает ехать (загорелся зеленый). Вы в полных непонятках, "почему я еду назад?", а вестибулярный аппарат еще и подыгрывает мозгу.
мой комментарий телепотрировался не в ту ветку, del
Недорогие лазерные дальномеры
Недорогие — означает, песец глазам как водителей и пешеходов. «Ведёрко» от Гугл, расположено как раз на уровне глаз, а теперь представь такое же, но максимально дешёвое «ведёрко» от noname производителя, которое будет тебе светить в глаза. (лидары Теслы — расположены внизу, но из-за этого способны парковаться под фуру, потому что её не видят)
Дальномеры — должны быть БЕЗОПАСНЫЕ! Я бы вообще от лазера в пользу радара отказался. Потому что нет желания менять ослепшие от лазеров глаза на протезы.
И закон Парето тут притянут за уши.
Эдак можно сказать про любую ситуацию: 80% пешеходов дойдут до цели, 20% не дойдут; 80% самолетов долетят, 20% не долетят; и т.д.
А именно — что при существующем уровне развития технологии часть ситуаций отрабатывается корректно, часть с проблемами. Точной статистики, конечно нет, как и методики сбора. Но тем и хорош Закон Парето, что плюс-минус справедливо описывает подобные сценарии.
Простите, но это полная лажа.
Вроде утверждения: «Встречу или не встречу динозавра на улице сегодня — вероятность 50%».
Нет статистики — так и скажите прямо.
Жаль, что такие перлы портят хорошую в целом статью.
Ваш пример (при допуске, что птицы=динозаврам) не противоречит приведенному мной.
Все оценки должны основываться на соответствующей статистике, которая опирается на некоторые допущения.
Голословные отсылки к Парето, или, скажем, к Мандельброту, чем тоже часто грешат, удивляют у тех, кто смеется над 50% вероятностью динозавра.
Вперед идут только распарралеливание и специализированные процы, плюс хардварная поддержка видео и аудиокодеков.
Для примера, стоит у меня процессор i7 2500k. Но различия по производительности в разы с современными не видать, хотя и хотелось бы солидного прироста от возможной замены.
На самом деле, быстрые CPU в десктопах нужны только гикам и учёным, всё уходит в облака — в дата-центре важен именно линпак/ватт, а не пиковая производительность с любым энергопотреблением, тоже самое для абонентских облачных терминалов — смартфонов, планшетов, ультрабуков — новые техпроцессы используют для увелечения их автономности, ведь локальная производительность не нужна — всё равно главные вычисления идут на стороне облачного провайдера.
Даже геймерам быстрые CPU не нужны, их интересуют почти исключительно быстрые видеокарты.
Линпак/ватт важен и для клиентов облаков, что бы подключение к поставщику SaaS услуги(от Gmail и фейсбука до всяких CRM, ERP систем, итд) сохранялось как можно дольше, и отрисовка интерфейса не тормозила, но ещё более он важен собственно для дата-центра.
Нет платежеспособного спроса на быстрые процессоры, без оглядки на энергопотребление, нет и предложения (и спрос 2.5 гиков это не платежеспособный спрос! Нет объемов!)
So, сама не геймер, но специально спросила у 4-х знакомых геймеров, у них вовсе не Intel Core i7-4790K. По их словам, они не особенно задумывались над выбором CPU, у всех 4-х разные модели, хотя у всех конечно i7
Intel Core i7-4790K, уже два поколения назад, а все еще считается одним из лучших среди мощных процессоров для игр.
Понятно, что геймеры это не целевая аудитория для производителей процессоров. Они целевая аудитория для видяшек/мышек/наушников/корпусов… память еще.
Например задача — заархивировать файл.
Сколько бы ни было ядер, многоядерный процессор не сможет обогнать одноядерный на этом алгоритме сжатия.
Можно переписать алгоритм для распарралеливания процесса, но в этом случае уровень сжатия однозначно будет хуже.
Потом вы говорите нужно делать многопроходное сжатие, в то время как на одном проце это все сделается за один раз.
Сжатие будет или хуже или медленнее. Просто так уж тут повелось.
Конечно другой вопрос, что «хуже» может оказаться на достаточно незначительный процент, поэтому нет смысла заморачиваться ради лишнего 1-2% объема данных. Но вопрос ведь был принципиальный.
Есть где-то ссылка, где бы детальнее показывалось как работает winrar, имеется ввиду именно работа с блоками? В стандартном faq и быстрым гуглением не вижу…
Хм, я всегда считал, что чем более крупный блок анализируется, тем лучше сжатие, ведь на бОльшем блоке можно найти бОльше совпадений и создать лучший словарь?
Да, но при размере в 1Mb, уже копеечная разница получается.

Тут как раз видно, насколько влияют граничные байты (Blazer и GZip) и независимые блоки (LZ4, Snappy)
Есть где-то ссылка, где бы детальнее показывалось как работает winrar, имеется ввиду именно работа с блоками? В стандартном faq и быстрым гуглением не вижу…
Да вроде бы он достаточно простой — LZ77 + энтропийное сжатие (тут не помню какое). Блоки, думаю как и в 7zip — при 1-2 тредах — потоковый, при большем количестве — независимые.
1. gzip вообще не должен сравниваться с работой обычных архиваторов, ибо он работает с потоком а не файлами, именно поэтому gzip и ему подобные алгоритмы имеют свою специфическую среду применения
2. Откуда эта картинка? Хотелось бы уточнить на чем ее применяли, потому что если тест проходил на примере упаковки кучи .doc файлов или игрушки, у которых размер 1 файла в среднем меньше мегабайта, то понятно что блоки в 1 мегабайт максимум, что им нужно.
P.S. Я не придираюсь, я действительно хочу разобраться )
Но в целом, при размерах блоков больше 64Кб — разница уже небольшая. Связано с тем, что размер «словаря» (не люблю это слово для LZ77), как раз 32-64Кб у данных архиваторов. Больший размер словаря даёт мало эффекта.
echo «Hello World» | gzip -f > archive.gzip
учтите, что Hello World это
1) не файл
2) это поток, который для gzip не имеет ни начала ни конца, но он будет выдавать скомпрессированный output по мере получения контента.
Вообще, давайте прекращать эту дискуссию (или уходить в ЛС), а то совсем от темы статьи уехали. Вот я напишу статью про устройство архиваторов с примером реализации (я джва года уже хочу это сделать, но лень), и там уже знатно посрёмся и помакаем друг друга в нечистоты ;)
Не делают современные алгоритмы это за один раз.
Делают. Ибо это аццки быстрее. Смотрите на LZ4, Snappy, LZO, QuickLZ и прочие. Это получается практически бесплатное архивирование при хорошем результате.
Есть граничные байты.
На них, как раз и проблема. Представьте для простоты файл в миллиард нулей. Сжимается в условные 5 байт (повторить миллиард раз ноль). С блоками у вас будет — повторить размер блока ноль. В реальности, это копейки, правда.
Потому необходим этап проверки «а не получится ли лучше если вот эти 10 кусков подряд сделать одним словарем»
Или вы фигню говорите, или в вашем понимании куски являются последовательностью, а не блоками. И классического Хаффмана (Дефри-Халман — это что-то среднее из Хаффмана и Диффи-Хеллмана, т.е. вообще не по делу), никто не использует. Обычный однопроходной энтропийный алгоритм.
Один словарь хорошо, когда файлы одного типа(например текст на одном языке). Если тип данных меняется(а это почти всегда), множественные словари выигрывают.
У винрара множество алгоритмов с эврестическим выбором по типу файла и/или характеристикам данных. Точный алгоритм постоянно меняется.
Большинство алгоритмов винрара(кроме fastest — который lzo) двухпроходные.
Сравните «ацки быстрый lzo» с rar на реальных файлах и вы прозреете. Понятно, что lzo быстрее, но в большинстве случаев место важнее. Не, ну кого интересует файл из одних нулей. Не прикалывайтесь.
Сравнивал, знаю. Двукратное улучшение сжатия и десятикратное падение скорости.
Один словарь хорошо, когда файлы одного типа(например текст на одном языке). Если тип данных меняется(а это почти всегда), множественные словари выигрывают.
Да какие там словари… нет в LZ77 словарей, там плавающее окно. И это гораздо проще, понятнее и быстрее чем словари. А это плавающее окно само подстроится под данные.
У винрара множество алгоритмов с эврестическим выбором по типу файла и/или характеристикам данных.
Кроме PPMd, там, насколько я помню, трансформирующие алгоритмы. А это всего-лишь пред.обработка перед тем же самым сжатием.
У винрара множество алгоритмов с эврестическим выбором по типу файла и/или характеристикам данных.
Ну, я вроде это и написал, LZ77 + энтропия. Но они не двухпроходные, а один поверх другого. Или вы считали подготовительные алгоритмы за проход?
Тут несоглашусь. При сжатии данных в 10 раз, скорость бывает важнее, чем сжатие в 11 или даже в 15 раз.
Но Winrar конечно крайне полезный, не только в плане алгоритмов но и других киллер фич.
Итого — да, можно ускорить процесс, но качество сжатия уменьшится.
2. Если архивировать все блоками, раскидывая их по ядрам, то каким образом ядро №2 узнает, что ядро №1 уже нашло полезную последовательность? Будет ждать? А зачем тогда парралелить?
3. Если анализ выполнять блоками, то много последовательностей можно найти в блоке 2к? Предположительно, файл должен быть проанализирован целиком, чтобы найти в нем как можно больше совпадений, а если его разделить, то между блоками последовательности не будут найдены — качество пострадает.
2. При архивации данные режутся на куски в соответсвии с количеством процессоров и каждый кусок отдельно архивируется. Выше приводили график, который показывает приблизительный размер куска(обычно берется 256кбайт).
3. Смотрите график.
Ставить рядом распознавание образов и архивацию — некорректно.
2. По поводу графика выше — я уже писал комментарий, что я бы хотел посмотреть контент целиком, поскольку вырванный их контента график может очень сильно отличаться. Сравните в том же winrar архивацию пачки файлов и архивацию тех же файлов, но используя опцию «непрерывный архив»
По поводу того, как именно данные режутся на куски, и архивируются отдельно — можно ссылку, где это детально расписывается, потому что я уже приводил аргументы в плане непрерывности блока, для поиска цепочек в словари.
3. про график уже сказал.
Я вижу ваши фразы, но я не вижу подкрепления этих аргументов. Я нигде не могу найти детальное описание, как работают хорошие архиваторы, типа 7zip и winrar, которые хорошо жмут. Только поверхностные фразы, которых как раз не хватает, чтобы получить подтверждение что именно и как там делится по блокам.
Скорее всего, проблема лежит не чисто в алгоритмах или железе а где то посередине. Иначе бы альфа го действительно играла бы, глядя дешевенькой веб камерой на экран ноута — альфа го проблем с лучшим железом или камерами не имела, но её разработчики не демонстрировали эффектного трюка, распознавая образ доски одновременно с игрой. Словом, как говорилось в одном сериале, «истина где то рядом».
Адекватно обработать изображение и распознать объекты в приемлимые сроки — никак.
Тут и плохая адаптация к освещённости (авторегулировка) и никакой динамический диапазон (номер ночью в свете фар)
Хотите сравнивать глаз с камерой — возьмите какую-нибудь любительскую камеру, типа d5300 и сравните ее работу со своим глазом. Картинка четкая по всему кадру, а не только в центре, и вообще «рыбий глаз» можно прикрутить. Фокусировка чуть медленнее глаза. А диафрагма позволит работать при условиях почти любой освещенности.
Можно взять и профессиональные камеры видеонаблюдения, у них диапазон от почти полной темноты начинается, правда стоят уже дороговато.
Навигация в автомобиле стоит 2-3 к USD? Серьёзно?
По прайсам дилера, конечно, запросто, но себестоимость-то раз в 10-20 меньше.
Безусловно, настоящий расцвет автономных автомобилей наступит только тогда, когда [наконец] человеков из-за руля уберут совсем. А уж робот с роботом — договорится, при условии связи между машинами, включая координаты и скорости, движение достигнет совершенства, абсолютно недоступного белковым и даже хордовым.
Но. Пример с фурой, например, говорит о том, что и водитель НЕ увидел фуры. Автопилот работает только при наличии рук на руле, водитель никуда не уходил. В ситуации с выезжающей фурой очевидно, что у человека была УЙМА времени на реакцию, но… Так что «оба хуже» в этой ситуации.
Иллюстрации тяжёлых железок хороши были бы в сравнении с аналогичными железками десятилетней давности — чтобы можно было начать догадываться о том, что будет ещё через десять лет.
А умопомрачительные цифры мозговой обработки хорошо бы подкорректировать, учитывая, что _далеко_ не все они обрабатываются на высоком уровне, да и скорость обработки учитывая тоже.
Лидары — это тупик и рудимент. Точечные датчики, как их ни крути, не дадут реальной картины. Среди отсылок к военным можно добавить и то, что ракеты в-в с точечным наведением на цель (со сканированием, ессно) сейчас сильно уступают матричному распознаванию (то есть да, камеры и зрение). Против матричных, например, не действует сокрытие двигателей, они видят самолёт как целое, и ловушки нужны уже не точечно-яркие, а целые облака, полностью скрывающие цель.
Добавим, что использование активной локации (лидары) при массовом использовании создаст только проблемы, как уже есть проблемы у радаров ближнего радиуса в адаптивных круиз-контролях и контролях мёртвых зон, когда их на дороге много рядом.
Просто во времена, когда начинали, без костылей-лидаров вообще не получалось. В реально эксплуатируемых системах их, конечно, не будет.
У пассивных систем в видимом диапазоне полно минусов — нет прямого измерения скорости, плохое разрешение по дальности, влияние погодных условий, тяжелая обработка и т.п. За приемлемые деньги ничего из этого не починить. Про военных и самолеты как единое целое давайте не будем, там дофига технологий, которые в серийное производстов и малые деньги вообще не переходят никогда.
Кстати, и проблема с помехами радаров рядом решается элементарно.
upd. Ещё меня почему-то удивляет, что люди думают, что при внесении технологий все должно быть идеально. Нужно сравнивать автопилоты не с абстрактным идеальным водителем, а с среднестатистическим человеком.
Нет, я понимаю, что современные круиз-контроли (так называемые автопилоты) годятся только для того, чтобы у водителя руки отдыхали. Но, к сожалению, компании позиционируют их как нечто совершенно иное. Потому что иначе их никто и не будет покупать. Отсюда и проблемы растут и люди бьются.
И конечно с включённым круиз-контролем нужно тормозить перед каждым препятствием.
А всякие там line assist — это не круиз-контроль.
«я понимаю, что современные круиз-контроли (так называемые автопилоты) годятся только для того, чтобы у водителя руки отдыхали.»
Я поправил, что круиз-контроль руки не освобождает.
А уж притормаживает он или нет — дело десятое. Человек всё-равно это ногой делает, а не руками.
Да и в вопросах торможения перед препятствиями я бы машине не доверял и тормозил бы сам, а автоматику рассматривал бы как резерв, страховку от того случая когда водитель «зевнул».
«Автопилот» теслы, как Вы правильно пишете — на самом деле всего лишь адаптивный круиз-контроль плюс система соблюдения полосы.
Так вот, о первом: адаптивный круиз-контроль поддерживает дистанцию за впереди идущим авто, пока то авто нормально едет. Он НЕ обеспечивает экстренных торможений. Те системы экстренных торможений, что есть — всегда включают оговорку «до скорости ...» То есть на высокой скорости (а там была немалая) система экстренного торможения НЕ гарантирует безопасности. Что он и проверил.
О втором: полоса контролируется по разметке и на дорогах с отсутствующей или нестандартной разметкой чудит, что и проверил недавно ещё один тесловладелец, слетев с трассы через деревянный забор.
В общем, эти случаи — дистиллированное следствие нечестного маркетинга от Маска. А вот история, когда машину начало колбасить в полосе, так что она перевернулась — уже действительно баг системы. И, как ни странно, тут можно быть спокойным, баг всегда исправим. А вот нечестный маркетинг…
В оригинале «заранее понять», и тут же уточнялось «динамический коридор».
Если я хочу перестроиться в другую где едет две машины, я легко могу просчитать как я могу между встроиться, и насколько аггрессивно мне нужно это делать, либо заметить, что меня «не пропускают» и отказаться от намерения, не допустив аварии.
Автопилот с пассивными датчиками это не рассчитает. Это было бы можно только при общении машин друг с другом — тогда они могли бы это делать даже лучше живых водителей.
Потому что достаточное пространство там может быть, но слишком мало, чтобы влезла машина с достаточной безопасной дистанцией для окружающих, а делать пилот аггрессивным, чтобы он мог «попроситься» и адекватно обнаружить, что его пропустили — пока нельзя сделать надежным.
То есть он работает со статическими данными — положение объектов и их текущее направление и скорость.
Динамики и предсказания — нет.
Например «вот этот автомобиль вроде бы пытается перестроиться, а вот тот виляет, словно там права только вчера получили, надо бы его объехать подальше».
Далеко впереди вроде пробка, пора тормозить.
На двойной осевой стоит напуганная собака и непонятно или она сейчас со всех сил рванет на мою сторону или на противоположную.
Пассивные датчики вот это все смогут обработать только при достижении интеллекта примерно равного человеческому.
Но можно пойти другим путем — оборудовать дорогу, чтобы все разметки, дорожные знаки и переходы были известны заранее, сигнал светофора воспринимался не на камеру, а по сети, заранее, ограждение дороги, чтобы не было желающих пересекать ее где угодно.
Оборудовать все автомобили, чтобы они сообщали друг другу положение и намерение, и тогда вообще не нужно будет смотреть где эта фура — о том, что она там есть и собирается поворачивать будет знать и автопилот едущего автомобиля, да и сама фура будет про него знать и не полезет вперед.
Этот вариант — стоит много денег в инфраструктуру, но с точки зрения технической реализации — он уже доступен и гораздо более надежен, и расходы на него даже можно просчитать.
А вот создание ИИ достаточного уровня для полного автопилота — ни по времени, ни по средствам, ни по реализации, достаточной для установки в автомобиль — сейчас оценить даже примерно не выходит.
Ремонт дороги встречается.
Торможения в пол, когда выходишь в хвост пробке из-за холма, тоже не редкость.
Вы же не 8 часов по одному и тому же бану в левой полосе двигаетесь, а съезжаете-заезжаете на них, это перестроения и все такое прочее.
А теперь все то же самое нужно отработать ночью, в дождь или в туман. Ой, не работает.
Может, просто не стояло задачи делать автопилот шарахающимся между рядами «гонсчиком». Если он не влезает — не стоит лезть, потому как зачем мне уступать такому? Почему он, выбрав не ту полосу, должен ехать быстрее за мой счёт? Это непедагогично — нехай в следующий раз попытается голову заранее включить.
Говоря о динамическом корридоре, я имел в виду и другие ситуации: например, автомобиль двигается по левому ряду автобана. Перед ним резко перестраиваются. Варианта два, тормозить и бить, либо уйти налево между автомобилем и отбойником.
Так вот автопилоту пока очень сложно понять, влезет он в такое пространство или нет.
А вот с юридической стороной все куда хуже. К примеру Тесла пракрасно распознает знаки ограничения скорости и слушается их. Но вот светофоры она якобы не распознает. На самом деле распознает, но специально не введена такая функция. Ибо если в один прекрасный день она таки кому-то в бок въедет или ей. И несмотря на то, что робот сделает это статистикчески намного реже, но Тесле сделают все мозги, а человекам нет. Вот тот убившийся в Тесле. Государство открывает расследование, будет смотреть, изучать. В тот же день еще 100 живых водителей впечатались во что-то и самовыпилились совершенно без оснований. Но так как это примвычно, то никто не открывает расследование по устройству глаз и рук и не выясняет: а может ли биологический механизм водить безопасно? Понимаете, если бы каждую обычную аварию превращали в такой же геморой для производителя машин и для всех водителей, то автопилоты были бы на улицах уже завтра. а вот люди — увы :)
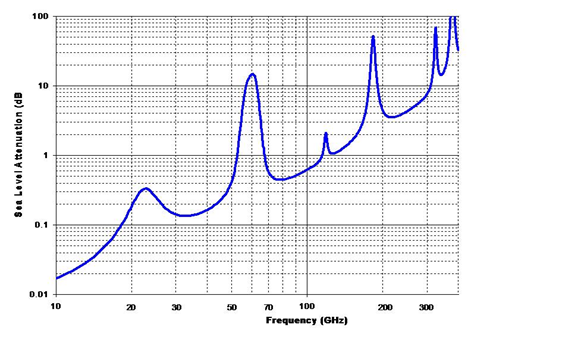
Принцип надо полагать что мелкая взвесь воды поглощает испускаемые радиоволны и в радар не возвращается ничего.
Интересно в новом поколении радаров как-то этот момент решат или же автопилот сугубо для идеальных условий, что тоже жирный минус если живешь не в солнечной Калифорнии, а в суровой России )))
Это просто зажравшиеся автопроизводители ломят цены. Реально же цена китайского навигатора или смартфона с GPS — от $50.
На самом деле, конечно, нет.
Навигация в автомобиле — это как компьютер с монитором, причем в automotive-исполнении, у него техтребования чуть строже, чем у китайского смарта.
Навигация в автомобиле включает картографию. Не задумывались сколько это стоит? Автопроизводители задумались, но они тупые и им пришлось купить Nokia HERE за 2,8 ярда евро.
Ну и интеграция даже лампочки в автомобиль включает в себя очень большой объем документации, которая увеличивает полную стоимость решения. Навигация сложнее лампочки.
Остается только физическое исполнение, но как по мне так планшет или телефон перед глазами на кронштейне удобнее расположенного в панели монитора. И функциональнее точно.
google maps гораздо хуже яндекс в странах СНГ, особенно при прокладывании маршрутов.
У меня ни разу такого опыта не было, более того, openstreetmap знает множество грунтовок и объездов, которых нет вообще ни на каких картах
Броды, объезды через лес, сельхоз дороги вдоль полей и насыпанные строителями грунтовки — больше информации нет на всех остальных картах, взятых вместе(использовал Навител, Гугл, Яндекс, генштабовку)
Автопилот — только на выделенных автобанах, соединяющих крупные города. Принцип работы автопилота будет немного другой. ВСЕ автомобили оснащаются системой позиционирования. Она сообщает системе положение, направление движения, скорость, тип автомобиля ( длина фуры, например, может быть больше 10 метров, это важно). В системе создается виртуальный образ всей картины и именно ей руководствуется автопилот.
… На самом автомобиле только датчики. которые сигнализируют о внезапном появлении препятствия, лось какой-нить или ханыга перебегает дорогу, спеша попасть в ближайший торгсин.
В случае неадекватного поведения автомобиля. система выводит его на обочину, глушит двигатель и вызывает эцелопов.
— Для Роисси все это особого значения не имеет. Сейчас важнее сделать разделительные полосы НА ВСЕХ ДОРОГАХ, а лучше 2 разделительных полосы с небольшим забором из колючей проволоки между ними толщиной хотя бы сантиметр.
При сколько-нибудь массовом производстве ситуация с ценой, доступностью и количеством установленых датчиков радикально улучшится — ибо ничего такого особенного и ценного в них нет, всё совершенно обычные матрицы, лазеры и микрочипы.
Второй пункт тоже не шибко силён — тот же «принцип Парето» действителен и для людей.
Достаточно того, чтобы ущерб от аварий у автопилотов был ниже, чем у водителей-людей, и это уже будет поводом массово их внедрять, а к оставшимся водителям — увеличивать требования.
Потому что за последние 10 лет на рынке лидаров изменилось почти ничто. Увы :(
Я просто уже два года наблюдаю попытки немаленькой команды индустриализовать один такой лидар и пока кроме бесконечных матов и перенесенных сроков начала серийного производства ничего хорошего не слышал.
На мой взгляд лидары с подвижными частями, от Velodine ли, от Sick или Ibeo, не имеют серийного будущего. А высокопроизводительные лидары без движущихся частей обещают не раньше, чем через 3-4 года.
Где-нибудь в глуши не продолжить рельсы-грунтовку, как с обычной дорогой
Даже щебень не спасёт
А для городского транспорта — да, проще некуда
Правда город проще с нуля построить чем в существующем дороги на рельсы менять
Хотя китайцы так и делают — строят пустые города с нуля, правда пока с обычными дорогами
Другой вопрос, что рельсы не очень универсальны, и рельсовый транспорт не сможет свернуть с главного пути и поехать прямо под подъезд или под задний вход для склада.
Но у автодорог есть бюджетный вариант (просто щебень) или совсем нищебродский, зато быстрый (грунтовка)
Можно ещё быстро плит накидать (не знаю, дороже щебня или нет — тут цены надо сравнивать на материал и на работу), обычно для грузовиков и другой тяжёлой техники кладут чтоб они могли до какой-нибудь стройки доехать
А вот в случае рельсов так сэкономить не получится
Ну можно деревянные шпалы вместо бетонных, можно рельсы ржавые б/у найти, но кардинальной экономии всё равно не получится — даже бесплатный материал с помойки надо везти и аккуратно укладывать и крепить
Поэтому вряд ли когда-нибудь жители деревень типа Глухоперди или Малого Зажопья ездить в райцентр по рельсам
А в остальном согласен и даже мечтаю своими глазами увидеть такой город, где весь транспорт автоматический и на рельсах :)
в Глухопердь вообще нет смысла строить дорогу — если там 2.5 дома, она никогда не окупится.
Но если есть какие-то грузовики и какая-то стройка, что туда нужно возить много тяжелой техники, то уже имеет смысл посчитать рельсы.
Дорога в глушиВы наверное имеете в виду «Дорога через глушь» — тут да, полностью согласен
Если где-то ведётся большая стройка, лучше сразу рельсы проложить
Потому что если что-то строится что-то капитальное, то скорей всего это будет использоваться долго — туда и оттуда постоянно придётся возить людей и грузы
А если рельсы положить — хорошая дорога уже готова :)
Причём не грунтовка и даже не плиты, которые грузовики за время строительства успели переломать и втопить в глину
в Глухопердь вообще нет смысла строить дорогу — если там 2.5 дома, она никогда не окупится.Да, никогда не окупится
Поэтому так и будут кататься по бесплатной грунтовке, которую сами же и раскатали среди поля
Ни щебня, ни тем более асфальта они никогда не увидят, ну и рельсов, соответственно тоже
Но по грунтовке на машинах ездить можно, хоть и далеко не на всех
Но рассматриваются лишь некие «сферические» идеальные автопилоты, способные в автономном режиме не только полностью заменить, но и превзойти человека в совершенно любых ситуациях.
До такого, конечно, ещё очень далеко, если это вообще не утопия – ведь и сам человек (не только среднестатистический водитель, но даже профи) далеко не идеален и не способен справиться со 100% всех ситуаций.
Автор упустил важнейший, на мой взгляд, момент – с развитием V2V+V2I имеющиеся проблемы внедрения автопилотов снизятся на порядок. Как минимум, сначала в крупных городах, потом в городах поменьше, потом почти везде.
Скорее всего (не вангую, но вполне допускаю) – в какой-то момент внедрение этих систем и инфраструктуры будет даже активно форсироваться путём законодательств (как в своё время происходило с теми же экологическими стандартами).
Поскольку эти технологии позволят с лихвой компенсировать несовершенство датчиков, а в подавляющем большинстве случаев даже «неуниверсальность». Ведь в сложных ситуациях робот с роботом «договорятся» друг с другом за доли секунды, после чего за те же доли секунды отреагируют и решат проблему по наиболее оптимальному сценарию – это куда быстрее, чем белковые водители.
ИМХО, ведь наибольший риск для автопилота представляют не столько его «слепота» или «глупость», сколько непредвиденные действия белковых водителей. Впрочем, это утверждение справедливо и для самих белковых водителей… =)
Один из главных экономических плюсов автопилота — готовая инфраструктура, которую можно использовать. Чем больше нужно вложить в дороги, тем хуже.
А триангуляцию как делать?
А если машина боком, а рядом куча других машин и сигнал отражается?
Радиометки не спасут никак, тут нужно не меньше, чем передача своих метрик (положение, направление, скорость движения)
1) расстояние до метки (по задержке возврата сигнала)
2) скорость сближения (по допплеровскому сдвигу)
Изменяя диаграмму направленности антенны можно так же измерить
3) направление на метку
Триангуляцию делать не требуется. По этому принципу работает вторичная радиолокация в авиации. С современной электроникой подобный вторичный радар можно сделать очень дешевым.
А в остальном да, радар и есть. На реальных машинах сегодня радар (в числе прочих датчиков) собственно и ставят, причем первичный. Переход к меткам и вторичной радиолокации резко увеличит точность подобных систем, помехозащищенность и снизит их стоимость.
В добавок не понятно кто ответственнен за столконовение в случае ошибочных координат: выдавший кривые координаты в эфир или таки руководствовавшийся ими.
По поводу же реальных координат другого ТС в целом – на дальних расстояниях ориентация по GPS, на ближних расстояниях ориентация по бортовым датчикам.
Если бортовые датчики есть, то, по соображениям безопасности, им все равно работать постоянно. И шум они тот самый будут постоянно создавать и надеяться на них придется же. Такие метки помогут в первоначальной оценке позиции обьектов вокруг, но точно не заменят хорошего набора бортовых сенсоров обьедененных через sensor fusion.
P.S. И, да – я не про метки, а конкретно про активные V2V-системы. Просто обратил внимание на ваше замечание о позиционировании (которое касается и V2V, в том числе).
Кроме того, «на западах» есть наземные сети коррекции GPS – повышают точность до 1 метра. Одна такая станция, насколько помню, может покрыть сразу целый город. Японцы через два года так вообще обещают запустить систему наземной коррекции с точностью до 5 сантиметров…
Одним словом – проблема не настолько критична и вполне решаема, на мой взгляд.
Кстати, сейчас подумалось…
Ведь параллельно GPS и сами TC могут постоянно «стабилизировать» друг друга с помощью уже собственных бортовых датчиков – этакая постоянная взаимная триангуляции с соседями по потоку и отдача данных в общую «карту» движения.
На мой взгляд V2V и V2I системы нужны и полезны, но либо как поставщики вторичной информации(классификация, размеры, «планы на будущее») либо на б0льших дистанциях. Я бы оценил нижнюю границу применимости первичной информации(координаты/расстояние между) от таких систем в 20-30 метров в городе и 70-100 для «ограниченных»(120-130) магистралей.
Речь о более «грубых» системах, вроде WAAS или EGNOS, у которых радиус действия каждой подстанции – 50-200 км. Одна подстанция в состоянии покрыть даже крупный город.
Что касается границ применимости V2V (V2I пока не рассматриваем, как тоже «роскошь)) – тут смотря для чего их использовать.
Если по прямому назначению, то границы действительно примерно такие. А если для „вспомогательных“ задач (вроде описанной мной в прошлом посте), то надо смотреть конкретно по каждой задаче.
С другой стороны я пока не вижу возможности обойтись без сенсоров вообще, переднюю полусферу все равно нужно покрывать хотя б на 150 метров, заднюю — хотя б на 30-40.
В общем-то, «продвигаю» именно эту мысль – в виде возражения тезису автора статьи о том, что несовершенство датчиков якобы является «фатальным» препятствием к внедрению автопилотов.
Поэтому, на мой взгляд, развитие и активное внедрение именно этих систем станет ярким «зелёным светом» для распространения автопилотов уже в самом ближайшем будущем (тем более, что и автомобилям с белковыми водителями эти системы будут крайне полезны).
А там уж дальше подтянется и качество сенсоров, да и V2I будет постепенно разрастаться.
ИМХО, в любом случае нужен первый шаг. Иначе прогресс в этом перспективнейшем направлении так и будет топтаться на месте – скептикам всегда будет «не хватать» то одного, то другого…
Но и проблемы растут в геометрической прогрессии. А что если на дороге препятствие без метки (обесточенная машина или пусть лось). А если канал связи заглушен? Если данные с внутренней системы (радара) противоречат данным от V2V, что делать? Очевидно, «своя» информация является доверенной и она важнее.
Я попробую поднять эти темы в рамках отдельного текста, с V2I/V2V к сожалению не все очевидно. Соглашусь с позицией LittleSquirrel, от датчиков на машинах никуда не деться и не факт, что информация от других машин серьезно поможет.
Потому, как минимум в силу сертификационных требований и functional safety, V2V сможет быть поставщиком только дополнительной инофрмации.
Поэтому попробую вкратце «резюмировать» свою позицию…
Я же не призываю вообще отказываться от бортовых сенсоров. Полностью согласен с тем, что они необходимы в любом случае.
А говорю лишь о том, что их нынешние недостатки (которые проявляются чаще всего именно на дальних дистанциях и скрытых препятствиях, вроде другой машины за углом/горкой) во многом можно компенсировать с помощью V2V-систем.
С большинством же остальных задач на ближних дистанциях нынешние сенсоры уже справляются достаточно неплохо. Но, да – до «совершенства» (буде таковое вообще имеется)) им ещё расти и расти, разумеется.
P.S. Кстати, обесточенные машины не проблема. Всегда можно сделать отдельный источник питания для пассивного маячка с заранее прошитыми основными параметрами ТС (грубо говоря, что-то вроде нынешней батарейки для BIOS).
И, кстати, на ближних дистанциях у сенсоров темных пятен хватает. Тот же подъезд под трейлер выполняется как раз на близкой/средней дистанции(при ослепленной или не определяющей грузовик сбоку камере), как раз на 150-200 метрах лидар, за счет вертикального раскрытия, такой грузовик увидит.
Во-первых, как вы сам же верно заметили в статье – лидар лидару рознь и «не все лидары одинаково полезны». Круче лидар – выше цена.
Во-вторых, лидар сам по себе достаточно нестабильное и капризное устройство, особенно в плохих погодных условиях (тут он сможет увидеть препятствие лишь «в лоб», т.е. на достаточно близкой дистанции).
То же самое (даже хуже) и с камерами, в общем-то. Типичные недостатки «глазков» нам всем давно известны хоть по тем же смартфонам или дешёвым «мыльницам».
Засунуть в авто хороший объектив видится малореализуемой затеей. Но даже если умудриться, то он не даст полной гарантии. Да и в ночных условиях будет вести себя ненамного лучше пресловутых «глазков».
С радарами лучше. Но какой мощности радар можно установить на авто? Тут, как и с лидарами – вопрос цены. И энергопотребления.
И только при наличии V2V у обоих ТС – весь тот инцидент разрешился бы с лёгкостью и в совершенно любых условиях.
Резюмируя:
Конкретно в данном инциденте – V2V выполняет роль дальнего обнаружения, бортовые системы в соответствии с полученными данными координируют «докручивание» манёвра уже на месте. Все живы, все довольны.
P.S. Второй, более мирный и комический, случай с заездом под длинномерный груз – решается либо установкой над лобовым стеклом дополнительной камеры, либо установкой направленного диагонально вверх лидара (ХЗ уж как, пусть думают)).
Но искренне надеюсь, что оба этих урока пойдут тесловцам (и не только им) на пользу.
>Во-вторых, лидар сам по себе достаточно нестабильное и капризное устройство, особенно в плохих погодных условиях (тут он сможет увидеть препятствие лишь «в лоб», т.е. на достаточно близкой дистанции).
Если мы говорим о хороших лидарах, то ненастолько уж они капризные. И трейлер они вполне увидят сбоку на достаточно большом расстоянии. Там проблема немного в другом:
При приближении к перекрестку()и выезде трейлера на него) лидар в бампере начинает видеть трейлер как два независимых обьекта — тягач и заднюю тележку. Если в этот момент данные не подкреплены камерой — система начинает считать что перед нами две цели. В добавок начинаются проблемы с определением направления вектора скорости обоих обьектов. В результате большинство алгоритмов попытаются уложиться между целями, получив известный результат.
При правильной классификации обьекта как «трейлер» и наличия корректного размера алгоритм не «расцепит» тягач и заднюю тележку, соответственно пойдет торможение. Но на данных одного лидара очень сложно сделать правильную классификацию и получается она очень приблизительной, размер, наблюдая один угол, тоже оценить сложно. Тут бы V2V пригодилась сильно, дав приблизительное(те самые 3-4 метра) месторасположение цели и ее точные размеры и тип.
У радара проблема совсем не с мощностью, там сложно шум убрать и стабильный обьект получить, по крайне мере по моему опыту.
Данную ситуацию вполне бы решил Велодайн на крыше, у него, ЕМНИП, 15 градусов вертикальное раскрытие. Но неэстетично, дорого и вообще…
Но и расстояние (расположение всех ближайших объектов на «общей карте») тоже крайне важно. Ранее я уже приводил пример с другим ТС за углом или за крутым поворотом, к примеру. Тут любые бортовые системы будут совершенно беспомощны – без V2V-коммуникации им придётся избегать столкновения лишь в самый последний момент, уже по факту обнаружения несущегося слева-справа или даже навстречу другого автомобиля…
Да и в том случае с Теслой многие грешат на вертикальный изгиб дороги недалеко от места ДТП (изгиб таки есть, правда спорный) – что также говорит в пользу дальнего обнаружения именно в виде V2V, а не «линейно-видящих» бортовых сенсоров.
Касаемо лидаров – да, есть хорошие, есть даже очень хорошие. Но и «хорошесть» их цены при этом растёт по экспоненте (Velodyne в том числе). То же самое и про радары, в общем-то.
А конкретно про фуры (и прочие составные ТС) – тут всего лишь требуется оборудовать любые отдельно движущиеся части пассивными суб-датчиками (входящими в общую V2V-систему составного ТС) для чёткой идентификации контуров объекта на дороге.
А как часто GPS не сразу распознает, что я уже свернул на съезд на поворот, и определяет это когда я по данным GPS уже поперек встречной еду под мостом, и только тогда он сотфварно догадывается и перескакивает на нужную линию.
Ориентироваться только на GPS для позиционирования автопилота — нельзя.
Стальной бордюр, стоящие у обочины машины, едущие машины, рекламные плакаты на стальных листах, здания с различными окнами и дверями, которые могут отразить сигнал радиометки практически идеально, что и не поймешь где оригинал?
Многие машины из металла — если передо мной едет маршрутка, она экранирует все метки, расположеные перед ней?
И все это нужно делать в условиях интенсивной динамической обстановки
В авиации посторонних предметов мало, вдобавок еще и все источники связи требуют выключать.
Чтобы был понятен масштаб проблемы: когда на базе маяков делают indoor-навигацию, для приемлемой точности приемник должен видеть примерно десяток стационарных маяков. А у автомобилей и применики, и маяки будут подвижными.
А если метка начнет передавать свои подробные данные, то это уже V2I и V2V)
• В ближайшем будущем – активное внедрение V2V-систем в выпускаемые новые модели. Плюс (пере)оборудование уже имеющихся авто – фактически это реализуемо для любых моделей, имеющих даже самую примитивную электронную бортовую систему.
Это уже станет громадным шагом к внедрению автопилотов. Фактически, в распоряжении бортового «ИИ» (в кавычках)) будет интерактивная карта всего движения в доступном радиусе, на которой отображены даже невидимые глазом/датчиками участники движения. Это уже чистое превосходство над водителем-человеком и над любыми видами бортовых «органов восприятия».
Впрочем, это не отменяет и параллельное развитие датчиков, они всё равно будут необходимы, но уже не настолько критически.
• Параллельно с этим разворачивание V2I. Конечно же, происходить это будет гораздо медленнее, чем развитие автомобилей. Но будет неизбежно, с каждым годом всё более и более повышая безопасность.
И, разумеется, максимально безопасным движение станет лишь тогда, когда на дорогах останутся только роботы. Но это уже вопрос достаточно отдалённого будущего, ИМХО.
Стоимость датчиков упадет с началом массового производства. Да стоимость чего угодно постоянно падает при повышении качества. придумают другого типа датчики в конце концов.
Ну а про неуниверсальность. Можно писать трэки с реальных водителей и добить базу данных по мечтам и поведению в них по всей Земле. Как минимум крупные города будут покрыты очень быстро. Да и я не вижу неразрешимой проблему неуниверсальности. Сейчас может и нет решения, но нет ничего принципиального чтобы его ограничивало.
Цена. Персональные компьютеры тоже стоили когда-то тысячи долларов. Опять же, всё дешевеет.
Если бы все было так просто. Эти данные попадают под защиту персональных данных и еще кучу законов, потому точно не вариант.
Насколько я понимаю, по российскому законодательству, например, достаточно удалить ФИО водителя. И это уже не будет считаться персональными данными.
Замечательная идея. Резать кто будет? Сервер? Так он вначале получит всю информацию, что уже попадает под защиту персональных данных. Автомобиль? Так у него есть идентификатор, а выгружая нарезанную информацию тот же сервер получит время и можно будет восстановить маршрут. Отправлять определенные участки? Так до этого нужно определить важные участки, т.е. это уже потом будет.
Это если забыть мою последнюю фразу — стиль езды тоже персональные данные. Трэк со скоростями = стиль езды.
>>Насколько я понимаю, по российскому законодательству, например, достаточно удалить ФИО водителя. И это уже не будет считаться персональными данными.
В плане защиты персональных данных Россия явно не лидер, как и по насыщенности автотранспортом и следованию ПДД, на нее равняться не стоит. Убрать только ФИО — это очень серьезно, в развитом мире никто не считает это за «защиту» уже лет 30, если не больше (например, в триллере 1988 года в США такое уже упоминается).
Даже взять обыкновенные пробки — в странах, где эта самая защита отсутствует или не такая сильная, появляются прекрасные сервисы типа Яндекс.пробок, где действительно в реальном времени отображается информация о скорости проезда конкретного участка. И навигатор с учетом этого может легко запланировать оптимальный маршрут передвижения. А все потому, что каждый, кто пользуется сервисом, также является поставщиком информации о своей скорости.
С другой стороны возьмем продвинутую Германию — думаете там все еще лучше? Да нифига. Пробки передают по радио! В 21-ом веке! И эта информация основана, в основном, на наблюдениях с самолетов, вертолетов и стационарных камер на дорогах. Скорость потока никто не оценивает — их есть только две «Стоим конкретно» или «Стоп энд Гоу». Ну и запаздывание обновлений на 10 минут, не меньше. Как с учетом этого оптимизировать свой маршрут? Да никак практически. А все потому, что защита персональных данных в полном объеме.
Думаю, что с автопилотной инфраструктурой все будет еще хуже. В итоге будут все автомобили обвешаны датчиками по самое не могу, а водитель будет платить абонентскую плату, за то, чтобы получать информацию о пробках «на 10 минут раньше».
По датчикам — не забывайте, что несмотря на свои ограничения, перспектив развития датчиков по сравнению с человеческими органами чувств вагон и маленькая тележка. Да и уже преимуществ по сравнению с человеком полно — например радар может увидеть человека в темноте, и распознать стоящий автомобиль в тумане — попробуйте усовершенствовать человека точно также.
Дальше — слепых зон (не считая пролета с Теслой) у датчиков скоро не останется — в результате тестов и испытаний довольно быстро найдутся подходящие варианты размещения тех же датчиков и их диаграмм направленности.
В случае же каких-то ограничений — как уже писали — переходим на другие виды — например добавить какие-то полоски на все автомобили, или новый вид разметки — это не такая уж большая проблема для инфраструктуры.
По универсальности: — я уже не одну сотню тысяч км отмотал по европейским дорогам и скажу вам — если сделать автопилот работоспособным только на автобанах — где нет разворотов и пересечений на одном уровне, нет встречного движения, всегда есть разметка. И если этот автопилот будет работать только на скорости в 100км/ч и меньше — я с удовольствием отдам N килобаксов за возможность сидеть и читать газетку или работать на компьютере в то время, как этот автопилот будет рулить по автобану. Потому, что ехать 8 часов в таком режиме, а если еще и в тянучке — самый обезьяний труд. Так что мне не нужен автопилот в городе, мне не нужен он и на обычной дороге. Дайте только автобан и все. И поверьте — автопроизводители тоже это понимают.
По рыночной цене — я вообще не понимаю о чем это. Стоимость системы? Так 50-60% ее компонентов уже входят в стоимость современного авто — всякие датчики парковки, мертвых зон, камеры кругового обзора. В Вольво даже радар передний в базе. Так что будет автопилот стоить на несколько килобаксов дороже — какие проблемы?
Ну и вообще последний коммент насчет 20% опасных случаев — вроде как это многих отпугивает. Мол, нафиг тот автопилот, если из-за вот этих случаев придется постоянно держать руки на руле или держать внимание на дороге. А иначе — потенциальный труп.
Не беспокойтесь, не придется. Если с существующими системами не удастся сделать 100%-но безопасную автономную поездку по тем же автобанам, то производители придумают другие варианты. Как по мне самый простой — понизить максимальную скорость и усилить пассивную безопасность, чтобы, например, при фронтальном столкновении с бетонным блоком, пассажиры 100%-но остались живы или отделывались незначительными ушибами.
В индустрию уже полтора десятилетия заливают несколько миллиардов ежегодно только на R&D, и проблем хватает. Слепые зоны остаются, проблемы с пониманием обстановки есть, и с диаграммами направленности тоже. Я 10 лет в этой теме, верьте.
Что касается автобанов, то я и пишу, что частные случаи уже решены и ими скоро можно будет пользоваться на серийных машинах. Скоро — это ближе к 2020. И все равно ответственность останется на человеке, потому что ремонтные работы (раз вы ездили, то знаете как на в полосе сужениях по +10 см к ширине машины оставляют) или вероятность внезапного перестроения автопилот к тому времени не научится отрабатывать.
И главное. Легковые автомобили не в приоритете у тех, кто делает автобанные автопилоты. Намного выгоднее (и важнее) решить задачу автобанного автопилота для грузовиков. У них это значит прямую экономию сотен тысяч или миллионов на оплату труда водителей, а не копейки в цене новой легковушки. Но что-то пока не решена задача.
Я не говорил, придумают «что-нибудь», я говорил, что уже вижу не мало способов усовершенствования, даже не будучи специалистом в конкретно данной области, но зная, какие перспективы открываются с развитием электроники, быстродействия и IoT.
Даже например: Вам приходило в голову, что наверняка множество аварий случается на одних и тех-же аварийно опасных участках? Наверняка на том же перекрестке, на котором сбило теслу, бывало не одно ДТП с поворотом налево. А теперь представим, что с помощью автопилотов, IoT и облаков была создана целая база таких мест, участков, с указанием, основных причин, погодных условий и т.д. Возможно? Конечно! Ну и в конце концов добавим в автопилот функцию предупреждения, чтобы при подъезде к этим местам, он начинал вопить «Эй чувак, я дальше не могу! Давай-ка ты возьмешь управление на себя, пока мы это чертово место не проедем!» Реализуемо? Вполне! Дорого? Думаю хватит даже краудфандинга на kickстартере для стартапа. Уменьшит количество аварий с участием автопилотов? Несомненно.
И это только один из вариантов, пришедших мне в голову. А у разработчиков автопилотов их сотни.
Ну и в конце концов добавим в автопилот функцию предупреждения, чтобы при подъезде к этим местам, он начинал вопить «Эй чувак, я дальше не могу! Давай-ка ты возьмешь управление на себя, пока мы это чертово место не проедем!»
Плохая идея. Во-первых, человеку, едущему пассажиром, потребуется время на осознание происходящего вокруг. Кто-то на хабре приводил хорошую аналогию: вы едете пассажиром с обычным водителем, и в один момент он отрывает руль, вставляет его в бардачок и говорит «Рули!».
Во-вторых, чем больше человек будет ездить с автопилотом, тем быстрее потеряет навыки вождения. И в самый ответственный момент не сможет принять управление.
Поэтому, на мой взгляд, Google прав: если робомобиль не может двигаться сам во всех случаях, ему не место на дорогах, т.к. вместо увелечения безопасности он может ее уменьшить.
Вы навели на очень занятную мысль…
Ведь получается, что в отдалённом будущем, когда везде будут только автопилоты (к тому моменту уже полноценно развитые) – людям не понадобится сдавать на права, и само понятие «водитель» со временем вообще исчезнет как явление?
Иначе говоря, без автопилота (в случае какого-либо технологического коллапса, например) – человек будет неспособен самостоятельно передвигаться на большие расстояния, поскольку просто не будет уметь водить, в цивилизации того времени это умение перестанет быть нужным.
Вполне возможно, что (опять же, в отдалённом будущем) из средств передвижения даже вообще исчезнет возможность ручного управления, за ненадобностью (как уже сегодня в гугломобилях).
Что бы вот сделать с этой потенциальной проблемой?..
Сам ещё несколько лет назад заметил, что стал писать «как курица лапой» – очень мало практики, в среднем писать от руки приходится не более 3-4 раз в месяц, да и то лишь достаточно краткие записи.
К счастью, хоть расписываться ещё не разучился – в работе масса бумажных документов под подпись… )
Туда же, кстати, и счёт – уже нынешние поколения (1990+) в основной своей массе достаточно плохо владеют письменным счётом и счётом в уме, калькуляторы едва ли не на корню искоренили необходимость этих навыков.
Тут же идёт разговор о самом ручном вождении. Особенно если дело пахнет вообще полным отказом от самой возможности ручного управления.
Что бы вот сделать с этой потенциальной проблемой?..
А нужно ли что-то делать? Это не первый раз, когда люди попадают в зависимость от технологий, теряя навыки. К примеру, достаточно отключить электричество во всем городе, и мы потеряем освещение, связь, водоснабжение, канализацию и т.д.
Вообще сомнительно, что ручное управление исчезнет совсем. Все равно останутся люди, которым нравится водить самим, да и транспорту для экстренных случаев может понадобиться ручное управление.
А вот если вдруг встанут автопилоты, то получится парадокс – вокруг куча способной передвигаться техники, но никто просто не умеет водить её вручную, все давно разучились (либо вообще не учились).
Что же касается конкретно ручного управления – вряд ли оно останется, на мой взгляд. К чему оно в массовых моделях, если к тому времени самостоятельно управлять смогут лишь единицы энтузиастов?
Без удобств – да, будет хаос. Но, ИМХО, лишь первое время. Потом привыкнут, освоятся. Нетрудно научиться пользоваться свечками и кострами, ходить «по воду» и копить дождевую, и даже привыкнуть к кустикам или горшку, пардон.
А сейчас — там автомат, там механика, там для инвалидов, там для леворульных…
Но вообще, у вас странная идея. Если перестанут работать все автопилоты, то наступит «безумный макс», или «водный мир», так что вопросом научиться водить, будут заниматься в последнюю очередь, после «найти пожрать» и «не дать себя убить»
возьмите какой нибудь мегаполис, надолго ли дров хватит в окрестности пусть даже 50 км?
человечество размножилось за счет использования энергии (в текущий момент, во многом ископаемой). если ее убрать, то биосфера сможет обеспечивать население планеты на несколько порядков ниже, чем сейчас.
Автопилот — далеко не первый и не последний случай, когда люди доверят свои жизни технологии, придуманной ими самими.
Но рассматриваю вопрос не в аспекте зависимости вообще (тут можно привести ещё много примеров, начиная аж с механических устройств) – а в аспекте утраты уже имеющихся и очень массовых навыков и умений (как в вашем предыдущем примере с письмом от руки).
Это вот новый для человечества феномен, на мой взгляд.
Были, конечно, почти полные исчезновения отдельных профессий – трубочист, кочегар, фонарщик, например. Сейчас на очереди ещё несколько. Но это именно отдельные профессии. А чтобы исчезали массовые умения, независимо от профессии – не помню.
Если только сравнить с верховой ездой. Но даже в этом случае менялись лишь средства передвижения, при этом не отпадала сама необходимость уметь ими управлять…
По второму вопросу – да, со временем можно восстановить всё (включая и сами автопилоты)). Но на весь этот срок человечество будет практически лишено способности быстро передвигаться на дальние расстояния.
2 myxo:
>Автор просто написал свое ИМХО, я вот так и не понял почему он считает проблемы нерешаемыми.
Да, но именно, что необоснованно и просто IMHO — для поста это, мягко говоря, маловато и слабовато.
2 kaichik:
>У пассивных систем в видимом диапазоне полно минусов — нет прямого измерения скорости,
И? Как человек меряет? Почему этого недостаточно?
>плохое разрешение по дальности
больше, чем у человека. А с учётом взаимообмена информацией — много больше.
>влияние погодных условий,
У автопилота в любом случае должно быть снижение скорости вплоть до остановки, если погодные условия не позволяют ехать. Что, кстати, исключит множество аварий, которые происходят сейчас.
>тяжелая обработка и т.п.
вот уж это — самый слабый из возможных аргументов. Как раз в обработке — вообще весь смысл, и как раз это — основа основ. Это и надо развивать.
>За приемлемые деньги ничего из этого не починить.
Весьма голословное заявление.
>Про военных и самолеты как единое целое давайте не будем, там дофига технологий, которые в серийное производстов и малые деньги вообще не переходят никогда.
Там та же технология с распознаванием образа вместо обнаружения сканирующей точкой.
>Кстати, и проблема с помехами радаров рядом решается элементарно.
Когда машин будут рядом сотни — зачем нужен этот фоновый мусор? Уровень этого фона от локаторов/лидаров будет на многие порядки больше фона, создаваемого телефонами — при том, что его тоже довольно старательно уменьшают.
Гораздо больше ништяков можно получить от обмена информацией, чем от активной локации.
Главная Ваша ошибка — Вы путаете «легче» и «лучше». Активной локацией определиться на дороге в рамках первого этапа разработки — легче. А вот определить особенности поведения велосипедиста, тонкости расположения машины, едущей «собачьим бегом» и распознать прицеп с большим клиренсом (тот самый случай) — за счёт «зрительной» обработки — лучше.
>У пассивных систем в видимом диапазоне полно минусов — нет прямого измерения скорости,
>И? Как человек меряет? Почему этого недостаточно?
Никак не меряет, только оценивает, этого недостаточно, потому что приводит к авариям (не успел остановиться перед впередиидущим автомобилем, не успел повернуть перед идущим навстречу автомобилем и т.п.)
>плохое разрешение по дальности
> больше, чем у человека. А с учётом взаимообмена информацией — много больше.
отличная оценка. Да, с кем и какой информацией у вас меняется камера?
> У автопилота в любом случае должно быть снижение скорости вплоть до остановки, если погодные условия не позволяют ехать.
> Что, кстати, исключит множество аварий, которые происходят сейчас.
Город засыпает, просыпается мафия. То есть ночью, в туман, в снег у нас дорожное сообщение прерывается.
>тяжелая обработка и т.п.
>вот уж это — самый слабый из возможных аргументов. Как раз в обработке — вообще весь смысл, и как раз это — основа основ.
> Это и надо развивать.
Давайте напишем в Intel с Альтерой, что им нужно повысить скорость обработки на порядок, а то они плохо стараются, мало десятков миллиардов заливают в числодробилки. NVIDIA в копию поставим. Выше уже расписали и аргументировали — скорость обработки в реальных задачах наращивать не получается.
>За приемлемые деньги ничего из этого не починить.
>Весьма голословное заявление.
То есть физическая невозможность кардинально повысить скорость обработки процессоров или например минимальный прогресс локаторов и лидаров за последние десятилетия вас не убедят.
> Когда машин будут рядом сотни — зачем нужен этот фоновый мусор? Уровень этого фона от локаторов/лидаров будет на многие
> порядки больше фона, создаваемого телефонами — при том, что его тоже довольно старательно уменьшают.
> Гораздо больше ништяков можно получить от обмена информацией, чем от активной локации.
Фон от телевышек, радио, сотовых, вайфаев и всего остального вас не пугает, а вот от активной локации да, избавиться бы.
Кстати, вы же понимаете, что локатор, который посветил на 200 метров на проехавшей мимо машине, излучает меньше чем аппаратура V2I-инфраструктуры, которая будет светить на сотни метров, причем в одном и том же месте, причем всегда?
Кстати, V2I очень слабо поможет в вопросах, для которых как раз и нужна локация — например, предотвращения столкновений — просто из-за присутствия лага.
> Главная Ваша ошибка — Вы путаете «легче» и «лучше».
> Активной локацией определиться на дороге в рамках первого этапа разработки — легче.
> А вот определить особенности поведения велосипедиста, тонкости расположения машины,
> едущей «собачьим бегом» и распознать прицеп с большим клиренсом (тот самый случай) — за счёт «зрительной» обработки — лучше.
Да это вы подгоняете реальность под свои представления. Камеры не видят скорость? Потому что не надо. Не умеют темноту или туман? Мы остановимся.
Никто в мире не разрабатывает систему, которая опирается только на пассивные датчики, у всех sensor fusion, и у всех так или иначе активные системы.
>И? Как человек меряет? Почему этого недостаточно?
Человек оценивает дистанцию, во многом, за счет очень продвинутой классификации и памяти. «Вот этот грузовик у нас 5 метров в высоту, поэтому когда он вот такого размера — до него примерно 40 метров». Именно поэтому пока в ходу были оптические дальномеры соответствующий персонал зубрил книжечки со схемами чужой военной техники и ее размерами.
Проблема в том, что все алгоритмы классификации с которыми я сталкивался — вероятностные. Я пока не знаком со случаем сертифицированной критической управляющей системы использующей вероятностный алгоритм. Даже в упомянутой тут sensor fusion приходится отказываться от интересных конфигураций с обратной связью ради верифицируемости системы.
Также мне кажется тут (фантазирую) тут нужны какие-то а-ля шахматные алгоритмы — с оценками фигур.
Ну и странных кейсов может быть очень много — впереди движется тонированная девятка с скоростью ниже скорости потока — повышаем оценку опасности объекта и стараемся держаться от него подальше. Впереди движется BMW X6 между полос и со скоростью существенно ниже скорости потока — аналогично (видел такое много раз). В зеркало видим приближающегося «Шумахера»-шахматиста. Никак не реагируем. Впереди образовалось пространство куда МОЖЕТ ЗАХОТЕТЬСЯ кому-нибудь вильнуть без поворотников — становлюсь внимательнее. Свободная дорога, зеленый, приближаюсь к незнакомому перекрестку — возможно я до начала перекрестка доеду когда зеленый начнет мигать, а перекресток длинный — так что на перекрестке окажусь уже на красный — рискованно — лучше снизить скорость. Впереди далеко ремонт по центру дороги — значит все будут перестраиваться вправо — лучше начать делать это заранее. Я знаю, что впереди БУДЕТ перекресток с поворотом налево — лучше заранее перестроиться вправо, чтобы не попасть в левый ряд. В общем любой автомобилист таких случаев вспомнит вагон. Интересно как у автопилотом с прогнозом? КМК надо строить двух-трехмерную модель и постоянно решать задачу о движении многих тел в двусполовиномерном пространстве. Откуда половинка — так как раз разные уровни авто по высоте и какие-нибудь торчащие трубы без флажков.
А существование 2-й проблемы ещё надо доказать.
Поэтому автономные автомобили и проектируют пока без опоры на инфраструктуру, они обязаны ездить без нее.
А во-вторых, этот ваш большой минус прекрасно стремится к нулю с увеличением количества системного транспорта. Любую телегу и любого ребёнка при желании можно снабдить передатчиком координат, чтобы они хотя бы пассивно снижали аварийную опасность. А на всех остальных лосих и калдырей будет достаточно ОБЩИХ глаз, ушей и мозгов единого транспортного организма.
Понятное дело там где физически автомобиль с идеальным пилотом из ситуации выйти не сможет то о каком автопилоте речь, аварии будут случаться пока будет вмешан человек(будь то водительдругого авто, пешеход или к примеру хакер который взломает общую систему координирования автомобилей и все начнут двигаться хаотически(это из ряда тероризма хотя вполне возможно))
Если создать хорошие условия, имееться ввиду трасса, разметка, ограждение, координирование автомобилей между собой и т.д. я думаю автопилот реален даже сегодня. Хотя и потребует это больших усилий и средств.
Отдельно хотелось прокоментировать слова автора где говорилось о вписывании автомобиля в поток, обгон, перестроения и т.д… Этот вопрос решаеться «общением автомобилей» точнее он даже не будет вставать
А «хорошие условия» — это строить инфраструктуру заново. Никто всерьез не думает об этом, экономики нет.
Вот меня как-то воротит, когда все, что на нейросетях, называют ИИ. Это же просто математическая модель способная распознавать сложные образы и все! Весь прогресс в этой области конкретно сейчас обусловлен двумя вещами: 1) по некоторым задачам появились огромные массивы данных для обучения; 2) появились мощности способные глубокие модели на эти данные натаскать. Все что сводится к неинтеллектуальному распознаванию сетями, того на чем они учились, решается: классификация объектов, действий на видео и т.д. Иногда даже бывают впечатляющие примеры, когда сетям удается генерировать подписи к картинкам. Но, нейросеть становится глупой, когда возникает ситуация, которой ее не учили. Допустим обучали находить животных, и вот тебе раз на входе леопардовый диван, на выходе будет леопард. Вот человек в здравом уме перепутает диван и леопарда? Проблема, конечно, решается: в датасет напихиваются леопардовые диваны и происходит переобучение. А теперь представьте себе: 1) есть почти все множество нестандартных ситуаций на дорогах, с которыми должен работать автопилот 2) на каждую ситуацию нужно наснимать кучу видео с видом от автомобиля 3) все эти видео должны быть размечены (отсылка к тем, кто вспомнил про youtube и авторегистраторы). Это безумные объемы и никакой синтетический город или что-то в таком духе не помогут. Если в датасете будет всего одна или две ситуации из миллионов, когда неадекватная бабуля переходит дорогу, можно смело говорить, что автомобиль бабулю задавит. Я думаю, что езда на автомобиле может и состоит на 90 процентов из повторяющихся видов из окна, но вот наш мозг в остальных 10 процентах спасает вас от смерти.
Для сторонников общения автомобилей друг с другом. Почему никто никогда не думает о стабильности и устойчивости такой системы. Просто представим, что дороги уже заполонены такими сетевыми автомобилями. Завтра один из автопроизводителей случайно вносит в общение между авто какую-то ошибку. Вот ошибка разносится по всей дороге, и все автомобили уже живут в параллельном мире, не имеющем отношения к реальности. На самом деле все испортить еще легче: возникает ситуация, когда клуб любителей ретро-автомобилей решает сделать заезд из одного города в другой. Вы предлагаете выключить все сетевые авто на это время? У них же уже не будет полного понимания движения на дороге, т.к. «железные динозавры» ретро-клуба им ничего не шлют… И снова возникает требование на автономное принятие решений, и мы снова уходим к автопилоту способному действовать в одиночку. А теперь подумайте, как тогда придется внедрять «общительные» автомобили. Ведь их же сначала на дороге будет мизерный процент среди прочих. В мире редко такое бывает, когда щелкнул пальцем, и у всех новый автомобиль.
Вообще сторонники идеи «белковые тупые и действуют неэффективно», часто забывают, что «эффективно» не значит «надежно и долго проработает». И даже более интересный факт: электричка эффективней личного автомобиля (экологичней, безопасней, больше КПД). В духе такой философии я бы скорее пропагандировал не умные автомобили, а полную замену личного транспорта на суперэффективные автобусы и грузовые автопоезда на огороженных дорогах, где они уже идеально «по алгоритму» будут эффективно и надежно кататься (выходит ЖД какая-то).
>>> У них же уже не будет полного понимания движения на дороге, т.к. «железные динозавры» ретро-клуба им ничего не шлют…
Так ведь прочие датчики никто не собирается отменять. =)
Даже с массовым внедрением V2V, на дорогах останутся прочие препятствия – от оказавшихся на проезжей части пешеходов или животных до ям или упавших деревьев, например. Так что, бортовые системы всё равно будут всегда задействованы параллельно V2V-«общению».
Поэтому «ретро-пробег» из вашего примера будет рассматриваться и распознаваться всеми роботизированными авто просто как движущееся препятствие, нероботизированный участник движения, которого надо объехать или пропустить по всем правилам ПДД. Более того – роботы вполне неплохо справляются с этим уже сегодня.
Что же касается «неэффективности белковых» – конкретно в этом направлении роботы действительно эффективнее. Поскольку неспособны думать и, следовательно, лишены эмоций и прочих человеческих недостатков. «Недостатков» – конкретно в аспекте безопасности дорожного движения.
Зато способны с сугубо роботовским «занудством» неукоснительно следовать правилам в режиме 24/7. Что и требуется на дороге, в общем-то…
P.S. А вот полностью уйти от частного транспорта к общественному – ИМХО, получится ещё очень не скоро. Если вообще получится. Тут уже просто особенности нашей психологии.
P.P.S. Да и общественный транспорт далеко не всегда безопасен, впрочем…
Так ведь прочие датчики никто не собирается отменять. =)
В комментариях выше высказывалась мысль, что легче реализовать общение автомобилей для координирования, чем заниматься крутыми датчиками и умными алгоритмами. Вот до тех пор, пока на дороге есть неинтегрированные в сеть подвижные объекты, все равно придется заниматься разработками крутых автопилотов с умением автономного принятия решений. Что особенно актуально будет при движении на таких дорогах, где за день 1-2 авто проезжает (например, в деревнях, а то и в какой-нибудь не очень умный трактор можно въехать).
Что же касается «неэффективности белковых» – конкретно в этом направлении роботы действительно эффективнее.
Я не спорю, что движение с неукоснительным соблюдением правил движения эффективно. Но стоит в окружении появится объекту, который правила нарушает, как все летит к черту. В ПДД же не прописаны все варианты действий на любое нарушение любого другого участника движения? Будет плохо, если Вася нарушит правила, и все робомобили остановятся до тех пор, пока Вася не скроется из виду, потому что иначе из-за неадекватного Васи соблюсти ПДД просто невозможно. Когда другие нарушают, иногда и робомобилю придется нарушать для обеспечения безопасности пассажиров (например, пьяный выехал на встречку и можно успеть самому отвернуть на встречку. Такие ситуации и будут определять надежность и стабильность системы, т.к. если один нарушитель ее выведет из строя, будет уже очень неэффективно. А нарушители будут всегда, следовательно четкими правилами и логиками не обойтись. Выходит что-то типа компромисса: либо «супер эффективно и в тепличных условиях», либо «не очень эффективно, зато как не пинай работает».
Не заметил, вроде, такой мысли.
Если это про мой пост, то там выдвигался лишь тезис о том, что внедрение V2V значительно снизит нынешнюю критическую важность бортовых датчиков. Но не говорилось о том, что при активном внедрении этой системы датчики вообще перестанут быть нужными.
>>> Но стоит в окружении появится объекту, который правила нарушает, как все летит к черту. В ПДД же не прописаны все варианты действий на любое нарушение любого другого участника движения?
В сети есть нашумевшее видео ярого поклонника «Теслы», в котором «полу-автопилотом» весьма недурно отрабатывается манёвр уклонения при агрессивном обгоне.
Да, знаю, что по злой иронии судьбы именно этот человек и стал первым погибшим в своей «Тесле». Но там были совершенно разные ситуации. Более того – будь в той трагической ситуации оба автомобиля оборудованы V2V-системами, то не было не то что летального исхода, а даже самого ДТП.
P.S. А конкретно в ПДД прописано, что при возникновении аварийной ситуации допускается только экстренное торможение, ответственность за последствия любых «избегающих» манёвров при этом полностью ложится на водителя.
Но даже эти последствия лучше всего сможет просчитать робот. И выбрать наиболее оптимальный вариант – тормозить с лёгким ударом или маневрировать, создавая потенциальную опасность для других участников движения (а также оценивать, имеется ли вообще эта опасность и можно ли маневрировать).
Подождите еще чуток, они подрастут до 5 лет, начнут предложения правильно строить и, возможно, интересоваться окружающим миром плотнее.
Дело в том, что то, как работает нейросеть, почти ничего общего с человеческим мозгом не имеет.
Сейчас вспомнил самую пожалуй эффектную демонстрацию некоторого «абсурда» в обучении нейросетей: http://www.evolvingai.org/fooling (на странице видео есть, советую посмотреть) Авторы статьи смогли подобрать такие синтетические изображения, на которых нейросеть выдает, например, 99% что это гитара, а на картинке тупо полосы повторяющиеся. Думаю, так сильно ваша дочка даже в самом раннем возрасте не ошибалась :)
С тем же успехом можно сказать, что карманные калькуляторы по интеллекту на уровне студентов, ведь интегралы умеют извлекать, скобки расставлять и все такое…
«Технологический прогресс» != «Прогресс в алгоритмизации»
Это простейшие аксиомы. По крайней мере, для ныне действующих вычислительных систем…
Значит надо продолжать исследования а автопилоты вводить в других сферах — например, морской или речной транспорт, шахты, внутрипроизводственный транспорт, карьеры
Например можно довести пассивную безопасность авто до того уровня, когда ошибки автопилота будут приводить в крайнем случае только к порче имущества, а не здоровья человеку — всякие капсулы безопасности, другая компоновка, подушки безопасности и т.д. Или законодательно — ограничив скорость движения на дорогах, например, до 80км/ч. Также можно ограничить свободу действий автопилота, разрешая ему движение только в в пределах одной полосы, без опасных маневров, типа перестроений, обгонов с большой дистанцией до впереди идущего ТС и т.д. Медленней, зато безопасней.
Что касается датчиков, то считаю что качество датчиков уже достаточно, железа для обработки уже почти достаточно, дело за эффективным софтом. Тут может обернуться так, что осталась пара тройка тысяч человеко/лет разработки при существующем подходе. Или прорывной вариант с новыми подходами и кучей патентов.
и туда же про стоимость. но полностью отходит в первой как бы нерешаемой проблеме.
Короче пока статья выглядит пустой завлекалочкой без полезной нагрузки и характеризуется фразой «есть мнение»
На всех дорогах, где ПДД разрешают движение транспортных средств с автоматической системой управления движением без участия водителя, установлены радио маяки. Каждый мая имеет свой уникальный номер (GUID), его положение в пространстве жестко зафиксировано. Данный маяк выполняет роль знака для автопилота, маяк может быть ассоциирован со скорость, опасностью, итд. Есть глобальная база данных маяков, которая контролируется ГИБДД. Помимо этого маяк может сам в аварийном режиме сигнализировать об опасности.
Количество таких маяков на кв. км. можно рассчитать в зависимости от ситуации. В городе маяков больше, радиус действия меньше, за городом маяков меньше, радиус действия больше.
Цена: Я прекрасно понимаю, что стоимость создания такой инфраструктуры огромная, но мы говорим про автопилоты! Для автопилота это означает компьютерное зрение аля GPS но гараздо более детальное. Дешевле чем локаторы.
Далее про 80 на 20. Не стоит думать однобоко! Давайте представим, что есть дороги которые специально выделены для движения автопилотируемых транспортных средств. В таком случае, когда машина понимает, что на дороге есть только она, другие такие машины и возможно случайные прохожие, с точки зрения машины мир превращается в NFS (извините за грубое сравнение). На таких дорогах даже светофоры будут не нужны. А среди всех объектов на дороге (учитываем, что машины «видят» и идентифицирую друг-друга) выделить человека либо животное и предотвратить столкновение с ним становится тривиальной задачей. И проглядеть столкновение, как человек читающйи СМС, такой автомобиль уже не сможет.
Не стоит пытаться наложить на шаблоны прошлого, что-то сверхсовременное, это сравнимо с решение проблемы движения Ламбаргини по брусчатке XIX века!
Отдельные дороги для автопилота не строят, потому что тогда у проекта в целом нет экономики. А без ТЭО никто и доллара не вложит в них.
И никакой маяк не решает проблему предотвращения столкновений, забудьте уже наконец об этом.
Ключевые минусы меток применительно к дорогам: небольшой радиус действия (десятки метров), необходимость питания (пассивные метки придется облучать с машин черт знает какой мощностью), ненаправленность. Представьте себе в центре города куча знаков и светофоров с метками, каждая из которых в радиусе 100 метров транслирует свой айдишник. Да вы даже примерно не поймете, где что находится, у машины мозг взорвется.
В 19 веке никто и подумать не мог, что вместо лошадей по брусчатке будут ездить современные авто, по специально построенным магистралям с миллионами дорожных знаков.
Лет 15 назад, обладатели Nokia обсмеяли бы смельчака, который попытался бы пофантазировать про смартфон размером 5 дюймов и запасом энергии на 16 часов и единый магазин для всех приложений.
Сегодня с тродом верится в будущее электромобилей, нефть правит миром.
«Да маяк не моежт», «да это все глупости» — это всего лишь мнение обывателя, без подкрепления фактами. А все то, что написал я — не что иное как субьективная фантазия!
Посмотрим, время покажет…
Ну вот это вы уже загнули. То, что нефть на исходе в весьма обозримом будущем уже не просто верится, а известно как факт.
Есть некоторая вероятность, что вместо электромобилей будут авто на водороде или еще каком-то альтернативном варианте, но электричество — на текущий момент один из самых развивающихся вариантов.
То, что маяк не может выполнять нужный вам функционал — мнение меня как человека, который немного разбирается в тематике, и мнение индустрии, которая до сих пор никак эти маяки не использует.
Прогресс шагает по дороге, никто не спорит, но маяки пока на обочине.
Придется содержать общую базу меток, а кому-то следить за ее корректностью и обновлением. Но если вы и так берете данные о метках из единой базы, то не проще ли занести в нее координаты конкретного светофора или знака, как это делется сейчас с навигацией?
Но они не обновляют карты каждый день. В общем, очень тяжело получается и громоздко, а для чего — не ясно.
И сейчас службы ведут учет знаков, просто будет более систематизированная работа, самим службам лучше станет.
Возможно, у автомобилей будет примерно тоже: в идеальных условиях (автобаны в хорошую погоду) автопилот полностью заменяет человека (и если ситуация не стандартная, то просит помощи у человека), а в других условиях — помогает человеку не допустить ошибки (как сейчас парктроники и т.п.).
Еще наблюдение. Чем больше автоматизации, тем обученней должен быть человек, чтобы понять, что автоматика не справляется. И человеку нужно постоянно следить за автоматикой, чтобы не пропустить тот момент, когда автоматика отказала, как в случае с Теслой. Так что если полные автопилоты и будут, то всех обучить их контролировать экономически неоправданно, поэтому IMHO их придется контролировать сверху (типа как автоматические ж.д. поезда). Но посмотрим.
В хороших погодных условиях (те самые ~80%) — автопилот может полностью сам вести самолет.Во-первых, он давно сам и водит самолёт, на плечах пилотов только взлёт/посадка на необорудованных автоматикой аэропортах. Если аэропорт оборудован автоматикой, то доступен полный цикл полёта без участия человека, хотя пилоты редко это практикуют.
Во-вторых, в плохих погодных условиях автопилот тоже может быть эффективнее, например при плохой видимости. Слышали наверное, «видимость плохая, иду по приборам» — старинная фраза, когда автопилотов ещё не было, но по сути человек им являлся, выполняя тупую прослойку между приборами и рычагами управления.
В третьих, (и самое важное) автопилот в авиации это не какой-то мифический чёрный ящик, а десятки систем, которые отдельно включаются/выключаются на автоматическое управление. К примеру, вы можете включить на автомат только поддержание скорости, или тангажа, или комбинацию каких-то параметров, управляя остальным вручную. Так что пилот как-бы нужен для управления всем этим делом, но с другой стороны все эти независимые системы вполне могут работать в связке.
А с автомобилем так не выйдет.
1) Все же пилота удалить из кабины не получается. Он контролирует автопилот, и в каких-то условиях, когда автопилот перестает справляться, берет управление на себя. Решение и ответственность на пилоте, а тот или иной автопилот — его помощник, пользованием которого он обучен.
2) Приборы — это хорошо. Но за частую они только передают информацию (скажем, как метеорадар), а анализировать ее и принимать решение (скажем, как лететь через грозу) — приходится пилотам. Это не тупая прослойка ;) — распознавание и анализ ситуации еще не всегда автоматизировано.
3) Собственно, ровно как в машине: хочешь, включаешь круиз контроль, хочешь — адаптивный, хочешь — слежение за разметкой и движение по полосам, и т.п. Но это всё системы, поведение которых водитель понимает. Соединение в связку — сложность системы резко возрастает и ее поведение перестает понимать водитель. Тогда либо его специально обучать (как пилотов самолетов, поездов, операторов различного типа станций, ...), либо выкидывать из машины и заменять внешним контролирующим оператором (без которого пока ничего не обходится).
Посмотрим, что выйдет ;).
Но уже есть поезда без машинистов. И они реально ездят.
Кстати, раз уж о самолетах — трафиком до сих пор управляют диспетчеры, а не компы.
Я вот часто задумывался, даже допустим если все проблемы решат, останется одна. Никто не позволит сделать "агрессивного" робоводителя. Подымут такой вой, что мир содрогнётся. А неагрессивный просто не съедет со съезда в пробку никогда, и будет еще задерживать весь поток за собой.
А вот от таких съездов больше всего устаёшь. По магистрали я и сам с удовольствием прокачусь.
допустим если все проблемы решат
А неагрессивный просто не съедет со съезда в пробку никогдаКогда решат все проблемы, пробок тоже не будет.
Я в этом не уверен. В конце концов если для управления машиной не нужны будут права, их будет становиться только больше, а вот дороги наращивать бесконечно не получится.
Хотя в некоторых местах без изменения инфраструктуры не выйдет…
Потому что такое движение давало бы простоту езды на большие расстояния, особоенно по незнакомым дорогам. А как по сложным улочкам городов кататься — так лучше я руками порулю.
У этого подхода один плюс: я каждый раз будут точно знать, кто ведет машину. На автобане комп справится получше человека, так что ему верить можно, а вот в городе верить в него страшновато, и от того лучше и не начинать. Это мое мнение, но оно мне кажется разумным для лично моего использования. И это лучше, чем постоянно ждать, ошибется или нет робот.
Дальше ведь больше будет. Пока такие дорогие машины в Замухрищенск редко заезжают, так что и проблемы странных дорог их мало касаются. А как массовость автопилоты наберут, ой начнут сходить с ума от таких «красот»:

Притом, уверен, не только Россия славна такой разметкой )
3 серьезных проблемы автопилотов, которые не выглядят решаемыми