Comments 127
Перед тем как мыслить, неплохо разобраться, почему мультикоптеры бывают только электрические.
Я думаю всем будет очень интересно это узнать (не сарказм). Не могли бы Вы пояснить свой комментарий. Заранее спасибо!
Перед тем как писать было бы неплохо изучить тему:
Bell V-22 Osprey в момент взлета очень даже можно назвать мультикоптером
вот квадрокоптер на бензине: https://www.youtube.com/watch?t=68&v=uuExXFCCDgA
Хотя сама статья ни о чем. Квадрокоптеры не используют из-за стоимости, сложности и того что КПД одного винта больше КПД 4-х. На картинке легко нарисовать пару кружков и заложить туда грузоподъемность триллион тонн, а по факту если начать считать все уже не так радужно.
Bell V-22 Osprey в момент взлета очень даже можно назвать мультикоптером
вот квадрокоптер на бензине: https://www.youtube.com/watch?t=68&v=uuExXFCCDgA
Хотя сама статья ни о чем. Квадрокоптеры не используют из-за стоимости, сложности и того что КПД одного винта больше КПД 4-х. На картинке легко нарисовать пару кружков и заложить туда грузоподъемность триллион тонн, а по факту если начать считать все уже не так радужно.
А Вы уже посчитали?
КПД винта зависит от количества лопастей и, внезапно, от диаметра винта.
4 маленьких пропеллера менее выгодны, чем 1 большой.
4 маленьких пропеллера менее выгодны, чем 1 большой.
Тяжелую технику уже не загрузить, максимум пару десятков людей…
Ми-26 и Ми-10 смотрят с удивлением.
Давайте расчёты, в конце концов — бремя доказательства лежит на доказывающем.
А то у меня тоже кое-то рисовал конструкцию светового меча со такими важными деталями как сборник ауры и магический камень-фокусировщик.
Давайте расчёты, в конце концов — бремя доказательства лежит на доказывающем.
А то у меня тоже кое-то рисовал конструкцию светового меча со такими важными деталями как сборник ауры и магический камень-фокусировщик.
Я не доказываю, я предложил возможное решение принципиальных недостатков вертолета. Мне интересно узнать, насколько жизнеспособна данная концепция.
У вертолёта единственный принципиальный недостаток — низкий КПД, ограничивающий скорость и дальность.
Повышение КПД решается увеличением диаметра винта, дальность иногда решается дозаправкой в воздухе.
Есть вторичный недостаток — трудная навигация в тесном пространстве, но он происходит совсем не только от большого винта. Недостаток происходит, во-первых, из-за тесного пространства, во-вторых, из-за существования летательного аппарата в нём.
Всё это плата за принципиальный достаток — точечные посадка и взлёт, имеющийся ещё у дирижабля со своими недостатками.
Если вас интересует эвакуация, она решена вертолётами, если надо с дозаправкой.
Если вас интересует высадка танков, она решена грузовиками и парашютами.
Если вас интересует высадка тяжёлых танков ниже уровня радара, то рекомендую ещё раз подумать против кого в глубоком тылу нужны тяжёлые танки. Против милиции? Хватит любого бронеавтомобиля с пулемётом, или БТР. Их высаживают вертолёты, если надо с дозаправкой.
Вам надо ваши размышления направить не в сторону аэродинамической схемы аппарата с вертикальными взлётом и посадкой, а в сторону повышения КПД. Как Маск, который именно направил свои размышления именно на аккумулятор, как слабую сторону всесторонне выгодного электродвигателя. КПД ЭД и прочие эксплуатационные качества значительно лучше, чем у ДВС. Аккумулятор можете заменить на другие источники энергии, хотя бы и компактный портативный ядерный реактор.
А уж имея такой источник энергии для электродвигателя, я вас уверяю, авиаконструкторы с гораздо большей квалификацией и отдачей спроектируют хоть мультикоптеры, хоть что.
Потому, что на данном инженерном уровне цивилизации, вопрос именно в компактном движителе, а не в том, куда его впихивать.
Вы, в обход авиаконструкторов, предлагаете куда впихивать компактный движитель, великодушно обходя вопрос где его раздобыть.
Повышение КПД решается увеличением диаметра винта, дальность иногда решается дозаправкой в воздухе.
Есть вторичный недостаток — трудная навигация в тесном пространстве, но он происходит совсем не только от большого винта. Недостаток происходит, во-первых, из-за тесного пространства, во-вторых, из-за существования летательного аппарата в нём.
Всё это плата за принципиальный достаток — точечные посадка и взлёт, имеющийся ещё у дирижабля со своими недостатками.
Если вас интересует эвакуация, она решена вертолётами, если надо с дозаправкой.
Если вас интересует высадка танков, она решена грузовиками и парашютами.
Если вас интересует высадка тяжёлых танков ниже уровня радара, то рекомендую ещё раз подумать против кого в глубоком тылу нужны тяжёлые танки. Против милиции? Хватит любого бронеавтомобиля с пулемётом, или БТР. Их высаживают вертолёты, если надо с дозаправкой.
Вам надо ваши размышления направить не в сторону аэродинамической схемы аппарата с вертикальными взлётом и посадкой, а в сторону повышения КПД. Как Маск, который именно направил свои размышления именно на аккумулятор, как слабую сторону всесторонне выгодного электродвигателя. КПД ЭД и прочие эксплуатационные качества значительно лучше, чем у ДВС. Аккумулятор можете заменить на другие источники энергии, хотя бы и компактный портативный ядерный реактор.
А уж имея такой источник энергии для электродвигателя, я вас уверяю, авиаконструкторы с гораздо большей квалификацией и отдачей спроектируют хоть мультикоптеры, хоть что.
Потому, что на данном инженерном уровне цивилизации, вопрос именно в компактном движителе, а не в том, куда его впихивать.
Вы, в обход авиаконструкторов, предлагаете куда впихивать компактный движитель, великодушно обходя вопрос где его раздобыть.
Разве я не прав в том, что погрузка/разгрузка вертолета техникой замедляется из-за узкой грузовой кабины? Или, тот факт, что посадка/взлет замедляется из-за, того что необходимо нормализовать положение вертолета к посадочной поверхности? Мне просто интересно...
Нет, если только речь не идёт о специально сконструированном бутылочном горлышке — посадке 100 пассажиров через одну дверь.
Скорость заезда автомобиля в тоннель регулируется только храбростью водителя.
Смотрите https://www.youtube.com/watch?v=Wsq8ol9XJPY
Кстати, Ми-10 и S-64 таких проблем не имеют — контейнер или платформу можно загрузить на месте загодя (за год) до прилёта и подцепить в считанные секунды.
Что касается «нормализации», я бы даже сказал «горизонтирования» вертолёта, то я вообще тут не вижу какие вдруг проблемы должны решаться косо висящим вертолётом.
Скорость заезда автомобиля в тоннель регулируется только храбростью водителя.
Смотрите https://www.youtube.com/watch?v=Wsq8ol9XJPY
Кстати, Ми-10 и S-64 таких проблем не имеют — контейнер или платформу можно загрузить на месте загодя (за год) до прилёта и подцепить в считанные секунды.
Что касается «нормализации», я бы даже сказал «горизонтирования» вертолёта, то я вообще тут не вижу какие вдруг проблемы должны решаться косо висящим вертолётом.
С нормализацией согласен. А по поводу погрузки, то надувную лодку из видео, можно и на сверхсветовой скорости погрузить. А тот же БТР? Тут храбрость уже не поможет, нужно хорошо "прицелиться" и скорость подобрать такую что бы суметь смоневрировать и не упереться в боковую стенку грузовой кабины.
Ладно. Опишите сценарий, в котором всеобязательно молниеносно загрузить БТР в тоннель фюзеляжа грузового вертолёта, пожалуйста. И мы, специально для такого случая, поставим внутри кабины буфер от паровоза.
))))))) Например, когда нужно забрать БТР с одной локации на линии фронта и перебросить на другую, в этом случае оперативность погрузки играет решающую роль.
В данном случае решающую роль играет скорость переброски.
А то, что вы видите по телевизору, называется аккуратное отношение к вверенной материальной части в мирное время. Тогда можно стоять перед летательным аппаратом 40 минут, проверяя бумаги, ища ответственных людей, произнося речи и т.п, после чего медленно, тщательно, не царапая техники, внимательно втолкнуть БТР в транспортный ЛА.
В военное время вся эта катавасия заменится на вгон по упрощённой процедуре. Но, опять таки, загрузка под обстрелом не ведётся, что позволяет сохранить аккуратность въезда.
Вы уже балуетесь, а не дискутируете.
А то, что вы видите по телевизору, называется аккуратное отношение к вверенной материальной части в мирное время. Тогда можно стоять перед летательным аппаратом 40 минут, проверяя бумаги, ища ответственных людей, произнося речи и т.п, после чего медленно, тщательно, не царапая техники, внимательно втолкнуть БТР в транспортный ЛА.
В военное время вся эта катавасия заменится на вгон по упрощённой процедуре. Но, опять таки, загрузка под обстрелом не ведётся, что позволяет сохранить аккуратность въезда.
Вы уже балуетесь, а не дискутируете.
Самый большой недостаток вертолета — это механическая сложность. Это приводит к ограничениям на размер лопастей (не выдержит автомат перекоса). Жесткие винты, как укоптеров, позволили бы даже увеличить КПД, за счет увеличения размеров (хотя, конечно, монстр получился бы еще тот...), но тут возникает проблема с низкооборотистыми (для избавления от редуктора) быстро реагирующими моторами. Пока что только электромоторы пригодны для подобных целей.
1) Я смотрю на большие вертолёты или даже ветряные электростанции. Хрупкость перекоса им не мешает.
2) Количество оборотов вертолёту менять незачем — есть шаг винта.
Или вы предлагаете тягу менять именно оборотами при фиксированном шаге винта? Так инерция винта как раз помешает быстро менять обороты.
2) Количество оборотов вертолёту менять незачем — есть шаг винта.
Или вы предлагаете тягу менять именно оборотами при фиксированном шаге винта? Так инерция винта как раз помешает быстро менять обороты.
Инерция винта обычно не имеет большого значения, так как значительно меньше инерции самого коптера. Механизм изменения шага винта и автомат перекоса — как раз и ограничивают максимальный размер винтов у вертолетов, из-за этого на мощных вертолетах его эффективность даже меньше, чем у маленьких — приходится больше оборотов давать на относительно меньший винт. Примеры коптеров с эффективностью вертолетных винтов имеются. Тот же пассажирский монстр с 16 винтами — у него площадь винтов практически равна вертолету сравнимых размеров. Просто гораздо дороже получается (пока не начали делать дешевые мощные низкооборотистые моторы), чем коптеры с малыми винтами, да и размеры невменяемые (что приводит к трудностям разработки каркаса), поэтому мало кто делает.
Коптеры, собственно, и распространились за счет большей простоты и надежности, несмотря на появления flybarless-вертолетов.
Коптеры, собственно, и распространились за счет большей простоты и надежности, несмотря на появления flybarless-вертолетов.
Не надо экстраполировать простоту мелкого коптера на его собрата из мира большой авиации.
"Незначительная" проблема инерции ротора мультикоптера. Так ли уж она незначительна? Момент инерции винта пропорционален квадрату радиуса, что означает, что у вдвое большего по размеру винта сопротивление изменению скорости вращения будет вчетверо больше. Это уже заметно даже на тяжелых радиоуправляемых мультикоптерах, что уж говорить про полномасштабные версии.
Без автомата перекоса не обойтись, без него на таких масштабах не выйдет обеспечить минимально приемлемую управляемость.
Если же строить монстров с десятками мелких роторов, то можно сказать "прощай" всем остальным характеристикам, КПД такой связки будет как у паровоза.
"Незначительная" проблема инерции ротора мультикоптера. Так ли уж она незначительна? Момент инерции винта пропорционален квадрату радиуса, что означает, что у вдвое большего по размеру винта сопротивление изменению скорости вращения будет вчетверо больше. Это уже заметно даже на тяжелых радиоуправляемых мультикоптерах, что уж говорить про полномасштабные версии.
Без автомата перекоса не обойтись, без него на таких масштабах не выйдет обеспечить минимально приемлемую управляемость.
Если же строить монстров с десятками мелких роторов, то можно сказать "прощай" всем остальным характеристикам, КПД такой связки будет как у паровоза.
Тут как бы такое дело, что у коптера винтов больше. Поэтому для обеспечения площади всех винтов большей, чем у одного вертолетного — они могут быть гораздо меньше по отдельности. Без перекоса вполне коптеры всех размеров отлично справляются, даже сверх-экономичные, с большими винтами для максимально длительных полетов, в этом вся прелесть коптеров — подбор PID-ов вопрос только аккуратности.
Проблемы у свертяжелых коптеров будут разве что со скоростью горизонтального полета, так как сложно наклонять всю конструкцию значительно. Но решается проблема достаточно просто — дополнительные толкающие винты, например (как и тяжелые случаи, когда не удается скомпенсировать момент вращения — тем же вертолетным рулевым винтом). КПД немного падает, но, учитывая, что нет ограничений по увеличению площади винтов, кроме сверхзвука на кончиках лопастей…
Проблемы у свертяжелых коптеров будут разве что со скоростью горизонтального полета, так как сложно наклонять всю конструкцию значительно. Но решается проблема достаточно просто — дополнительные толкающие винты, например (как и тяжелые случаи, когда не удается скомпенсировать момент вращения — тем же вертолетным рулевым винтом). КПД немного падает, но, учитывая, что нет ограничений по увеличению площади винтов, кроме сверхзвука на кончиках лопастей…
Что в итоге получается?
Аппарат, утыканный винтами, как ежик иголками?
Что-то подобное было у Жюля Верна, если не ошибаюсь, но ему простительно, в те времена кроме аэростатов и не было ничего.
Я так и не понял, в чем премущество-то выходит? Делаем мы коптер, чтобы не столкнуться с проблемой огромной инерции роторов, ставим 192 винта поменьше, постоянного шага (которые эффективны только при определенных оборотах), столько же двигателей, электронных регуляторов оборотов, километры силовой и сигнальной проводки (уже неслабый перевес выходит), делаем раму, дизайну которой позавидовал бы Шухов со своими башнями, чтобы уместить эти ВМГ, ставим огромный аккумулятор, чтобы прокормить это добро, и полноценную гировертикаль, а не копеечное MEMS-поделие, помирающее от любой вибрации. Выходит такой еж, летающий десять минут, выглядящий безумно страшно, которого сдувает любой ветер, из-за того, что вся конструкция получилась безумно парусной. А четыре (восемь, шестнадцать) винтов по сторонам, для направленного движения только усилят впечатление. При этом любой отказ силовой системы приведет к неминуемому падению без какой-либо возможности его предотвратить. В чем же профит?
"нет ограничений по увеличению площади винтов, кроме сверхзвука на кончиках лопастей…"
Ой как зря вы недооцениваете инерцию ротора, ой зря. У больших вертолетов ротор до рабочих оборотов раскручивается с минуту, останавливается тоже ой как не быстро. Запасенная кинетическая энергия огромна. Торможение/ускорение такой бандуры в доли секунды потребует очень немаленького запаса по крутящему моменту, что выльется в более тяжелый и громоздкий двигатель, в более высокие рабочие токи, и прочее. Молчу, о том, что гигантский ротор тоже должен быть достаточно крепким (сиречь тяжелым), чтобы все это выдержать.
Если вы считаете, что инерция роторов сама по себе прекрасный стабилизатор, то тут все тоже не все так просто. Гироскопический эффект будет противостоять попыткам наклонить аппарат, но от нежелательных поступательных смещений это не спасет. Как результат, полеты в погоду, отличную от штиля этому аппарату будут противопоказаны.
Опять накатал огромную простыню, но я просто не могу понять, в чем смысл пытаться придумать "невероятно эффективную" аэродинамическую схему неспециалистом? Сотни самых экзотических схем уже были построены, испытаны, и похоронены на свалке истории, в виду своей полной практической непригодности. В том числе, и большие мультироторы с винтами фиксированного шага. Это вообще самое начало 20-го века. От земли-то они отрывались, но только вот не управлялись совершенно.
Аппарат, утыканный винтами, как ежик иголками?
Что-то подобное было у Жюля Верна, если не ошибаюсь, но ему простительно, в те времена кроме аэростатов и не было ничего.
Я так и не понял, в чем премущество-то выходит? Делаем мы коптер, чтобы не столкнуться с проблемой огромной инерции роторов, ставим 192 винта поменьше, постоянного шага (которые эффективны только при определенных оборотах), столько же двигателей, электронных регуляторов оборотов, километры силовой и сигнальной проводки (уже неслабый перевес выходит), делаем раму, дизайну которой позавидовал бы Шухов со своими башнями, чтобы уместить эти ВМГ, ставим огромный аккумулятор, чтобы прокормить это добро, и полноценную гировертикаль, а не копеечное MEMS-поделие, помирающее от любой вибрации. Выходит такой еж, летающий десять минут, выглядящий безумно страшно, которого сдувает любой ветер, из-за того, что вся конструкция получилась безумно парусной. А четыре (восемь, шестнадцать) винтов по сторонам, для направленного движения только усилят впечатление. При этом любой отказ силовой системы приведет к неминуемому падению без какой-либо возможности его предотвратить. В чем же профит?
"нет ограничений по увеличению площади винтов, кроме сверхзвука на кончиках лопастей…"
Ой как зря вы недооцениваете инерцию ротора, ой зря. У больших вертолетов ротор до рабочих оборотов раскручивается с минуту, останавливается тоже ой как не быстро. Запасенная кинетическая энергия огромна. Торможение/ускорение такой бандуры в доли секунды потребует очень немаленького запаса по крутящему моменту, что выльется в более тяжелый и громоздкий двигатель, в более высокие рабочие токи, и прочее. Молчу, о том, что гигантский ротор тоже должен быть достаточно крепким (сиречь тяжелым), чтобы все это выдержать.
Если вы считаете, что инерция роторов сама по себе прекрасный стабилизатор, то тут все тоже не все так просто. Гироскопический эффект будет противостоять попыткам наклонить аппарат, но от нежелательных поступательных смещений это не спасет. Как результат, полеты в погоду, отличную от штиля этому аппарату будут противопоказаны.
Опять накатал огромную простыню, но я просто не могу понять, в чем смысл пытаться придумать "невероятно эффективную" аэродинамическую схему неспециалистом? Сотни самых экзотических схем уже были построены, испытаны, и похоронены на свалке истории, в виду своей полной практической непригодности. В том числе, и большие мультироторы с винтами фиксированного шага. Это вообще самое начало 20-го века. От земли-то они отрывались, но только вот не управлялись совершенно.
В начале 20 века не было ни мемс-датчиков (которые не так уж и легко мрут, не говоря уже о том что копейки стоят и легко резервируются), ни подходящих аккумуляторов для электродвигателей, ни, что самое важное — контроллеров для балансирования всего этого дела. Собственно, как только это все появилось — так тут же коптеры вытеснили вертолеты в модельной нише практически полностью. Потому что просто, неприхотливо, надежно и маневренно.
У коптеров с числом роторов от шести — отказ одного из них не представляет серьезной проблемы (а узлы типа регуляторов оборотов — в принципе, даже резервируются). Попробуйте зарезервировать в вертолете хотя бы редуктор, не говоря уже о механизме изменения шага винта или перекоса. Ну да, можно придумать схемы, где основную нагрузку несут не электрические моторы.
У коптеров с числом роторов от шести — отказ одного из них не представляет серьезной проблемы (а узлы типа регуляторов оборотов — в принципе, даже резервируются). Попробуйте зарезервировать в вертолете хотя бы редуктор, не говоря уже о механизме изменения шага винта или перекоса. Ну да, можно придумать схемы, где основную нагрузку несут не электрические моторы.
В модельной нише
Вот про то, что модельная и большая авиация это две совершенно разные вещи, все постоянно и забывают.
Коптеры вытеснили модельные вертолеты из-за своей конструкционной примитивности. В небольших масштабах это действительно так. С ростом масштаба достоинства улетучиваются, а недостатки становятся уже фатальными. И то, даже в модельном размере вертолеты все равно грузоподъемней, и экономичнее. Про надежность — отказ батареи (которые иногда любят гореть и взрываться) = катастрофа, повреждение силовой проводки = катастрофа, разрушение части рамы (которая из-за своей протяженности будет хрупче вертолетной) = катастрофа. Разлетевшийся на части винт на одном из лучей может привести к этим повреждениям, и способность продолжать полет при отказе одного из двигателей уже не поможет. Вертолеты кстати тоже так умеют, на одном двигателе летать. Из двух.
Хорошо, объясните, как должен выглядеть большой коптер, и какие у него будут преимущества перед летательным аппаратом любой другой схемы. Пока ни в статье, ни в комментариях внятного применения такой машинке никто не нашел.
Как я уже говорил, потеря одного из двигателей (вплоть до физического отламывания одного из лучей) для правильного коптера будет означать только небольшую потерю тяги. Силовая проводка может вместе с лучем отвалиться — ничего не будет (так как она к каждому двигателю идет отдельно). Вертолет может и полетит на втором двигателе, но вот со сломанным механизмом перекоса или изменения шага винта — нет, а эти элементы зарезервировать физически невозможно, разве что в соосной схеме, но у нее еще более сложные и менее надежные механизмы получаются.
Коптеры отлично масштабируются, но на данный момент времени есть проблемы с компонентами для сверхтяжелых (мощные низкооборотистые двигатели, например). Большой коптер может выглядеть как угодно, в этом как раз и есть преимущество коптеров — гибкость и нетребовательность к аэродинамике. Положительными чертами будут простота пилотирования, надежность (отсутствие сложной механики, возможность сделать резервирование практически любой степени), легкость обслуживания и ремонта (не нужно ковырять сложные механизмы, ремонт можно довести до простой модульной замены моторно-винтового блока).
Коптеры отлично масштабируются, но на данный момент времени есть проблемы с компонентами для сверхтяжелых (мощные низкооборотистые двигатели, например). Большой коптер может выглядеть как угодно, в этом как раз и есть преимущество коптеров — гибкость и нетребовательность к аэродинамике. Положительными чертами будут простота пилотирования, надежность (отсутствие сложной механики, возможность сделать резервирование практически любой степени), легкость обслуживания и ремонта (не нужно ковырять сложные механизмы, ремонт можно довести до простой модульной замены моторно-винтового блока).
Я не знаю, почему вы так считаете.
Одни и те же доводы повторяются из раза в раз. Вы пытаетесь увеличить в разы существующие радиоуправляемые модели, полагая, что все характеристики просто линейно смасштабируются. Но физика так не работает. Проблема не в отсутствии двигателей, мощных низкооборотистых движков полно, они используются повсеместно, номенклатура выпускаемых электродвигателей не заканчивается на ассортименте ближайшего хоббийного магазина. То же и про простоту. Тут уже множество людей писало, почему большой коптер не будет проще обычного вертолета. Один из последних комментариев поднял еще один неучтенный фактор — неравномерная обдувка винта набегающим потоком, вызывающая изгибающие моменты на лопастях. Вертолеты для частичной нейтрализации этого эффекта очень хитрым образом меняют угол атаки лопасти циклически за один оборот. У коптера с винтами постоянного шага такой возможности нет.
Коптеры привлекательны среднему гику тем, что там не надо ничего знать про аэродинамику, мол, "прицепил к палке МК и движки и оно летает, надо только код писать". Это так, но только до определенных масштабов и скоростей, о чем я уже не раз писал, повторяться не стану.
Про простоту управления — а с чего бы? По простоте управления коптер ничем не проще вертолета. Даже сложнее, так как без электроники летать не может совсем, что роднит его с современными истребителями. Стабилизацию и автопилот можно без проблем прикрутить на что угодно. Но опять же, я например умею управлять любым видом летающих моделей, за исключением реактивных, но корочки пилота большой авиации я не требую, потому что это совершенно несравнимо разные вещи.
Большой коптер имеет смысл только в одной ипостаси — "стул с моторчиком", для перемещений на небольшие расстояния с небольшой скоростью. Правда, полноценным летательным аппаратом это назвать сложно. В остальных случаях другие схемы однозначно предпочтительней. Электросамолет будет проще и дешевле, вертолет быстрее и экономичней.
Одни и те же доводы повторяются из раза в раз. Вы пытаетесь увеличить в разы существующие радиоуправляемые модели, полагая, что все характеристики просто линейно смасштабируются. Но физика так не работает. Проблема не в отсутствии двигателей, мощных низкооборотистых движков полно, они используются повсеместно, номенклатура выпускаемых электродвигателей не заканчивается на ассортименте ближайшего хоббийного магазина. То же и про простоту. Тут уже множество людей писало, почему большой коптер не будет проще обычного вертолета. Один из последних комментариев поднял еще один неучтенный фактор — неравномерная обдувка винта набегающим потоком, вызывающая изгибающие моменты на лопастях. Вертолеты для частичной нейтрализации этого эффекта очень хитрым образом меняют угол атаки лопасти циклически за один оборот. У коптера с винтами постоянного шага такой возможности нет.
Коптеры привлекательны среднему гику тем, что там не надо ничего знать про аэродинамику, мол, "прицепил к палке МК и движки и оно летает, надо только код писать". Это так, но только до определенных масштабов и скоростей, о чем я уже не раз писал, повторяться не стану.
Про простоту управления — а с чего бы? По простоте управления коптер ничем не проще вертолета. Даже сложнее, так как без электроники летать не может совсем, что роднит его с современными истребителями. Стабилизацию и автопилот можно без проблем прикрутить на что угодно. Но опять же, я например умею управлять любым видом летающих моделей, за исключением реактивных, но корочки пилота большой авиации я не требую, потому что это совершенно несравнимо разные вещи.
Большой коптер имеет смысл только в одной ипостаси — "стул с моторчиком", для перемещений на небольшие расстояния с небольшой скоростью. Правда, полноценным летательным аппаратом это назвать сложно. В остальных случаях другие схемы однозначно предпочтительней. Электросамолет будет проще и дешевле, вертолет быстрее и экономичней.
Изгибающие моменты — это как раз от того, что винт вертолета — не очень прочная конструкция (фактически — очень гибкая) из-за механизмов изменения шага и перекоса, они бы просто не потянули нормальные жесткие лопасти, как у цельных винтов. Двигателей для прямого (без редуктора) привода больших лопастей банально не найти, либо они стоят на порядки дороже, так как нужен огромный толкающий момент при очень низких оборотах. Внутреннего сгорания таких, например — просто нет, кроме каких-то экспериментальных.
Простота управления у коптеров объясняется как раз нечувствительностью к аэродинамике и автоматической компенсацией всех сложных моментов. С такой простотой даже вертолеты не могут соперничать, не говоря уже про самолеты, которые надо поднимать в воздух и сажать, даже если сделать полный компьютерный контроль за собственно полетом.
Простота управления у коптеров объясняется как раз нечувствительностью к аэродинамике и автоматической компенсацией всех сложных моментов. С такой простотой даже вертолеты не могут соперничать, не говоря уже про самолеты, которые надо поднимать в воздух и сажать, даже если сделать полный компьютерный контроль за собственно полетом.
То есть если винт станет жестче, эти моменты внезапно исчезнут? Никуда они не денутся, и кстати, помимо механического воздействия, это все банально плохо влияет на КПД винта, а с КПД у мультироторов и так все плачевно.
Я не хочу продолжать дискуссию, вы продолжаете повторять одни и те же доводы, основывающиеся на личном опыте строительства тех самых палок с винтами. Но упорно не хотите понимать, что этот опыт не масштабируется. И искренне не верите, что так хорошо летающий коптер, если его увеличить в десять раз, летать почему-то не будет совсем. И дело отнюдь не в отсутствии тяговитых движков (кстати, а что мешает-то поставить одноступенчатых редуктор? То, что там есть две страшные шестеренки?).
Нету у коптеров никакой нечувствительности к аэродинамике, воздух для всех один. То, что коптер летает как топор без стабилизации, еще не значит, что с воздухом в полете он не взаимодействует. И не стоит пытаться закрыть глаза на то, что многие силы масштабируются с размером и скоростями во второй, а то и в третьей степени, надеюсь понятно, что это значит.
Я не хочу продолжать дискуссию, вы продолжаете повторять одни и те же доводы, основывающиеся на личном опыте строительства тех самых палок с винтами. Но упорно не хотите понимать, что этот опыт не масштабируется. И искренне не верите, что так хорошо летающий коптер, если его увеличить в десять раз, летать почему-то не будет совсем. И дело отнюдь не в отсутствии тяговитых движков (кстати, а что мешает-то поставить одноступенчатых редуктор? То, что там есть две страшные шестеренки?).
Нету у коптеров никакой нечувствительности к аэродинамике, воздух для всех один. То, что коптер летает как топор без стабилизации, еще не значит, что с воздухом в полете он не взаимодействует. И не стоит пытаться закрыть глаза на то, что многие силы масштабируются с размером и скоростями во второй, а то и в третьей степени, надеюсь понятно, что это значит.
Оно не сможет гнуть винт, поэтому просто будет пытаться наклонить коптер. Учитывая, что самая сильная сторона коптера — как раз умение выправлять крен (без этого оно просто не летает), то угрозы никакой нет, кроме небольшого снижения КПД. Затрудняюсь дать количественную оценку, но не думаю что она будет очень уж велика. Ну и, опять же, можно просто поставить дополнительный толкающий импеллер для полета в абсолютно горизонтальном положении, тогда, насколько я понимаю, проблемы этой вообще не будет (нет крена — нет неравномерности).
Редуктор — это уже механическое усложнение конструкции, не такое уж простое, учитывая нагрузки и сильно понижающее надежность, а также значительно увеличивающее эксплуатационные расходы. В идеале — надо без подобных элементов.
Редуктор — это уже механическое усложнение конструкции, не такое уж простое, учитывая нагрузки и сильно понижающее надежность, а также значительно увеличивающее эксплуатационные расходы. В идеале — надо без подобных элементов.
Кстати, мы совсем забыли про один простой факт о вертолетных винтах — они совсем не идеал в плане КПД. Жесткие винты как раз более эффективны, банально потому что не ограничены в выборе профиля. Например, практически все хорошие винты делают с переменным шагом вдоль лопасти. Вертолеты себе такого позволить не могут.
Винты, рассчитанные строго на одни обороты, теряющие эффективность в режиме работы вне оптимального. И несмотря на их эффективность, везде почему-то используют ВИШ.
В горизонтальном полете никуда эта неравномерность не девается. Половину оборота набегающий поток увеличивает воздушную скорость лопасти, половину оборота уменьшает.
Действительно, две шестерни в картере куда как ненадежней мотора, с сотнями ампер тока в обмотках, ведь обмотки у моторов никогда не сгорают, вы что. И подшипников у мотора нет.
А еще подумайте, как со всем этим чудом взлететь. Дополнительные маневровые двигатели, куча лучей, куча моторов и прочего, что имеет отнюдь не самый маленький вес.
Кстати, половина аргументов вами старательно игнорируется. Хотя я понимаю, что убедить энтузиаста коптеростроения я не смогу. Хотя рекомендую подумать, почему большие коптеры до сих пор в лучшем случае висят над землей на высоте в два метра, и то без пилота, как правило. И дело не в том, что нет двигателей. Они есть, да и сделать на заказ их реально, это не нанотехнология.
В горизонтальном полете никуда эта неравномерность не девается. Половину оборота набегающий поток увеличивает воздушную скорость лопасти, половину оборота уменьшает.
Действительно, две шестерни в картере куда как ненадежней мотора, с сотнями ампер тока в обмотках, ведь обмотки у моторов никогда не сгорают, вы что. И подшипников у мотора нет.
А еще подумайте, как со всем этим чудом взлететь. Дополнительные маневровые двигатели, куча лучей, куча моторов и прочего, что имеет отнюдь не самый маленький вес.
Кстати, половина аргументов вами старательно игнорируется. Хотя я понимаю, что убедить энтузиаста коптеростроения я не смогу. Хотя рекомендую подумать, почему большие коптеры до сих пор в лучшем случае висят над землей на высоте в два метра, и то без пилота, как правило. И дело не в том, что нет двигателей. Они есть, да и сделать на заказ их реально, это не нанотехнология.
Не везде, в самолетах практически не используется. Как и в коптерах. Банально потому что режим как раз примерно один и тот же, можно оптимизировать конкретно под него.
Там будет, скорее всего, совсем не две шестерни, скорости и нагрузки не те. Я не специалист в редукторах, но могу сравнить с теми же вертолетными редукторами, которые на реальных машинах — они представляют из себя достаточно сложные механизмы, с очень высокими требованиями к обслуживанию. То есть потеряется смысл изначальный.
Двигатели на заказ, конечно, можно сделать. Многофазный двигатель, например, вполне подойдет. Но с системой контроля — стоить будет дороже половины вертолета, а нужно будет несколько штук. Не говоря уже о том, что электрических пассажирских вертолетов тоже не делают, а ДВС-ов, подходящих для коптеров — просто нет.
Там будет, скорее всего, совсем не две шестерни, скорости и нагрузки не те. Я не специалист в редукторах, но могу сравнить с теми же вертолетными редукторами, которые на реальных машинах — они представляют из себя достаточно сложные механизмы, с очень высокими требованиями к обслуживанию. То есть потеряется смысл изначальный.
Двигатели на заказ, конечно, можно сделать. Многофазный двигатель, например, вполне подойдет. Но с системой контроля — стоить будет дороже половины вертолета, а нужно будет несколько штук. Не говоря уже о том, что электрических пассажирских вертолетов тоже не делают, а ДВС-ов, подходящих для коптеров — просто нет.
Не надо никого убеждать. Я не утверждаю, и не утверждал с самого начала, что идея жизнеспособна. Мне было интересно узнать Ваше мнение, мнение других пользователей GT по данному вопросу. В самарском аэрокосмическом, если вкратце, сказали, что идея имеет место быть, но основной вопрос это масса ЛА (винты, фюзеляж, батареи, полезная нагрузка и т.д.).
Насчет этово вам немного соврали. Любой вертолет серьезный вертолет имеет крутку лопастей, разную их ширину. В общем все непросто.
Взяв существенный по размерам и/или оборотам гироскоп, вы удивитесь насколько может быть велика инерция вращения. Я думаю, что для обычного вертолёта инерция винта может быть больше инерции фюзеляжа, или, как минимум, сравнима.
Гироскопичность винтов коптеру только на пользу. Проблема с инерцией винтов ему может вредить в плане быстроты коррекции крена (тут как раз гироскопичность поможет :)) и компенсации крутящего момента. Крутящий момент легко компенсировать простым хвостовым винтом в вертолетном стиле (благо этот момент гораздо меньше чем у вертолета).
Это не совсем так. В конечном итоге важны только объем и скорость потока воздуха, проходящие через винты. Сделайте квадракоптер с площадью диска винтов сравнимой с площадью диска винта обычного коптера — получите примерно ту же эффективность (чуть меньше, потому что масса будет больше). А можно сделать площадь больше и получить выигрыш в эффективности, не упираясь в проблемы приближения скорости движения конца лопасти к скорости звука.
Да, можно выровнять ситуацию:
* дать одинаковую ометаемую площадь винта;
* дать одинаковую выходную скорость воздушного потока;
Тогда, вроде бы, подъёмная сила будет равна.
При этом окажется, что энергетические затраты у мультикоптера выше.
Это вопрос аэродинамики. Больше диаметр — больше КПД.
--> Теуш В.Л.-1944) Работа воздушного винта.djvu и многие аналогичные.
* дать одинаковую ометаемую площадь винта;
* дать одинаковую выходную скорость воздушного потока;
Тогда, вроде бы, подъёмная сила будет равна.
При этом окажется, что энергетические затраты у мультикоптера выше.
Это вопрос аэродинамики. Больше диаметр — больше КПД.
--> Теуш В.Л.-1944) Работа воздушного винта.djvu и многие аналогичные.
Да это все понятно, импульс отбрасываемого воздуха пропорционален скорости, а затраченная на разгон энергия — квадрату скорости.
Но нельзя неограниченно увеличивать площадь винта — получится так, что конец лопасти пересечет звуковой барьер. Поэтому все равно придется увеличивать количество винтов для роста КПД — есть тяжелые грузовые вертолеты с двумя винтами (CH-47). С другой стороны, рост количества винтов приведет и к росту общей массы. Точка, где встречаются потери КПД от роста массы и рост КПД от увеличения площади — определяется размерами ЛА, допустимыми перегрузками и используемыми материалами. В общем, я это к тому, что у квадракоптеров ужасный КПД, но не потому, что они используют схему с четырьмя винтами, а потому, что их традиционно делают очень компактными. А грузовая летающая платформа с винтами на четырех углах не обязательно будет иметь КПД ниже чем у среднего вертолета.
Но нельзя неограниченно увеличивать площадь винта — получится так, что конец лопасти пересечет звуковой барьер. Поэтому все равно придется увеличивать количество винтов для роста КПД — есть тяжелые грузовые вертолеты с двумя винтами (CH-47). С другой стороны, рост количества винтов приведет и к росту общей массы. Точка, где встречаются потери КПД от роста массы и рост КПД от увеличения площади — определяется размерами ЛА, допустимыми перегрузками и используемыми материалами. В общем, я это к тому, что у квадракоптеров ужасный КПД, но не потому, что они используют схему с четырьмя винтами, а потому, что их традиционно делают очень компактными. А грузовая летающая платформа с винтами на четырех углах не обязательно будет иметь КПД ниже чем у среднего вертолета.
Чем больше лопастей, тем КПД меньше. Чем диаметр меньше, тем КПД меньше.
Вы абсолютно точно подметили, что диаметр винта ограничен трансзвуковыми эффектами.
Поэтому народ для развития требуемой подъёмной силы или силы тяги в первую очередь увеличивает диаметр винта, а во вторую очередь увеличивает количество лопастей — каждое действие с потерей КПД. В третью очередь для защиты от трансзвуковых эффектов может даже попробовать уменьшить скорость вращения опять ради роста диаметра.
Поэтому «не обязательно» на самом деле всё-таки «обязательно».
Что касается микрокоптеров с микропропеллерами, там, скорее всего вступает в нехилую силу масштабный коэффициент аэродинамики — но тут мне сложно аргументированно дискутировать, так как специальным образом я этим вопросом не интересовался.
И, тем не менее, я упорно указываю топикстартеру на то, что установовка четырех-шести-N «винтиков» по периметру комфортного контейнера потребует в первую очередь эффективного компактного движителя, какового у человечества в данный момент в наличии немає.
Вы абсолютно точно подметили, что диаметр винта ограничен трансзвуковыми эффектами.
Поэтому народ для развития требуемой подъёмной силы или силы тяги в первую очередь увеличивает диаметр винта, а во вторую очередь увеличивает количество лопастей — каждое действие с потерей КПД. В третью очередь для защиты от трансзвуковых эффектов может даже попробовать уменьшить скорость вращения опять ради роста диаметра.
Поэтому «не обязательно» на самом деле всё-таки «обязательно».
Что касается микрокоптеров с микропропеллерами, там, скорее всего вступает в нехилую силу масштабный коэффициент аэродинамики — но тут мне сложно аргументированно дискутировать, так как специальным образом я этим вопросом не интересовался.
И, тем не менее, я упорно указываю топикстартеру на то, что установовка четырех-шести-N «винтиков» по периметру комфортного контейнера потребует в первую очередь эффективного компактного движителя, какового у человечества в данный момент в наличии немає.
Мм… чисто в теории, почему бы не использовать гибридную схему с электродвигателями и FPLG? Электродвигатели компактны, а использование FPLG позволит не таскать с собой полтонны батареек для хоть сколь-нибудь приличной дистанции.
загуглил FPLG, получил ссылки на панк группу, что это за технология? У нас в дискуссии встал вопрос, а нужна ли вообще такая компоновка винтов и фюзеляжа с грузовой кабиной…
Free-piston linear generator. ДВС со свободным поршнем с которого напрямую снимается электрическая энергия. Тойота в 2014 выпустила интересный прототип, а в конце 2015 вышел какой-то израильский аналог. Если есть гибридные автомобили, то почему бы не быть гибридному мультикоптеру?
Насчет компоновки: в предложенном варианте КПД будет значительно (в разы, если не на порядок) ниже, чем у грузового вертолета — уж очень маленькая площадь дисков. Увеличение количества винтов ради увеличения площади приведет к росту веса конструкции и к необходимости выносить эти винты дальше на консолях, что в свою очередь создает еще и проблемы с прочностью. В общем-то у небольших винтов есть своя ниша, как это видно по мультикоптерам — они дают огромную маневренность за счет низкой инерционности. Я могу представить себе боевой дрон-мультикоптер, но грузовому коптеру это вроде бы как и не нужно.
Насчет компоновки: в предложенном варианте КПД будет значительно (в разы, если не на порядок) ниже, чем у грузового вертолета — уж очень маленькая площадь дисков. Увеличение количества винтов ради увеличения площади приведет к росту веса конструкции и к необходимости выносить эти винты дальше на консолях, что в свою очередь создает еще и проблемы с прочностью. В общем-то у небольших винтов есть своя ниша, как это видно по мультикоптерам — они дают огромную маневренность за счет низкой инерционности. Я могу представить себе боевой дрон-мультикоптер, но грузовому коптеру это вроде бы как и не нужно.
А если стоит задача оперативно перебрасывать войска (например транспортер+пехота) вдоль линии фронта? Тогда маневренный воздушный транспорт с широкой грузовой кабиной в которую можно быстро погрузиться очень подходящее решение, а если грузовые люки расположены в корме и по бортам, то это очень подходящее решение.
Ми-26
Пардон за некропостинг, но по мере чтения мне всё более не давал покоя вопрос: на кой леший перебрасывать по воздуху один БТР с отделением пехоты? Какую такую незаменимую помощь он окажет на другом участке фронта?
По поводу Вашего комментария. Я не военный и не разбираюсь в военной тактике и стратегии, но я думаю БТР и отделение пехоты это уже весомое подкрепление на поле боя. Своим ходом, естественно, такое подразделение будет добираться до цели долго (в зависимости от расстояния конечно). Обратите внимание, что Ми-26 также использовался для перемещения одного БТР и пехоты в Чечне, например. В статье даже есть фотография, иллюстрирующая это.
уже весомое подкрепление на поле боя
Вы ещё скажите, что один магазин от автомата — это весомая поставка боеприпасов.
Минимальная тактическая единица, способная действовать самостоятельно — это рота.
А усиливать подразделение ведущее бой надо всегда вдвое — это как азбука.
Если на то пошло, то от одного боевого вертолёта на месте будет больше толку, чем от ЕЩЁ одного БТРа.
А на расстояние, на которое имеет смысл перебрасывать ОДИН БТР в боевой обстановке — он доедет быстрее, чем будет в вертолёт грузиться.
Обратите внимание, что Ми-26 также использовался для перемещения одного БТР и пехоты в Чечне, например
А зачем это делалось не рассказывают? Что ещё, кроме БТР, он вёз?
Даже не буду спорить с Вами, т.к. не имею ни знаний, ни опыта ведения боя. Видимо у Вас есть хотя бы одно из двух.
А всё-таки интересно, зачем они его возили?.. Не подскажете, где про это почитать?
Статья из которой было взято фото, почитайте там много интересного про Ми-26. Конкретно под данный фото говорится, что БТР просто транспортировали в какой-то район, а не перебрасывали для подкрепления во время боя, но не факт, что такой вариант исключается вовсе.
Минимальная тактическая единица, способная действовать самостоятельно — это рота.
Получается на выполнение боевой задачи меньше роты не отправляют?
Чисто в теории надо считать.
1) Будет ли КПД ЛА в целом достаточным для эксплуатации, так у нас здесь таскание мёртвых двигателей, не нужных в крейсерском режиме?
А тут у меня квалификации нет — МАИ/Жуковского не кончал.
Тут ведь вопрос может оказаться не в том, что военным топлива жалко. Им обычно не очень жалко. А в том, можно ли впихнуть достаточно топлива в такую конструкцию, чтобы ещё и полезная нагрузка сохранилась.
Но чисто в теории у меня вопрос:
1) зачем нужна промежуточная стадия, если топливо можно впрыскивать сразу в подъёмный мотор? Всякая стадия жрёт КПД.
1) Будет ли КПД ЛА в целом достаточным для эксплуатации, так у нас здесь таскание мёртвых двигателей, не нужных в крейсерском режиме?
А тут у меня квалификации нет — МАИ/Жуковского не кончал.
Тут ведь вопрос может оказаться не в том, что военным топлива жалко. Им обычно не очень жалко. А в том, можно ли впихнуть достаточно топлива в такую конструкцию, чтобы ещё и полезная нагрузка сохранилась.
Но чисто в теории у меня вопрос:
1) зачем нужна промежуточная стадия, если топливо можно впрыскивать сразу в подъёмный мотор? Всякая стадия жрёт КПД.
Но чисто в теории у меня вопрос:
1) зачем нужна промежуточная стадия, если топливо можно впрыскивать сразу в подъёмный мотор? Всякая стадия жрёт КПД.
поясните вопрос, пожалуйста
У электромотора гораздо шире рабочий диапазон скоростей вращения и ему не нужна коробка передач и практически не нужно охлаждение. Он может использоваться даже на реверс, и при этом компактнее при тех же мощностях.
Вполне возможно, что КПД связки мотор-генератор-электромоторы окажется выше, а не ниже. Но изначально я предложил это в качестве решения вопроса о компактном движителе. Грузовой коптер на батарейках — это пока даже не смешно. А вот гибрид… у гибридных авто расход топлива меньше — понятно, что там часть экономится за счет рекуперации, но другая часть — за счет выбора оптимальных режимов работы двигателя.
Вполне возможно, что КПД связки мотор-генератор-электромоторы окажется выше, а не ниже. Но изначально я предложил это в качестве решения вопроса о компактном движителе. Грузовой коптер на батарейках — это пока даже не смешно. А вот гибрид… у гибридных авто расход топлива меньше — понятно, что там часть экономится за счет рекуперации, но другая часть — за счет выбора оптимальных режимов работы двигателя.
Электромотору все равно понадобится "коробка передач" — автомат перекоса.
Винт большого диаметра обладает огромным моментом инерции, просто так его не раскрутишь и не остановишь, а без быстрого и точного изменения тяги не получится управлять полученным аппаратом.
Плюс, вертолет это не автомобиль, двигатель у вертолета обычно работает в близком к оптимальному режиме, его не требуется постоянно разгонять и тормозить. ГТД итак достаточно экономичны, вряд ли получится сделать более экономичную систему, используя тот же тепловой двигатель, плюс дополнительный источник потерь в виде двойной конвертации энергии.
Винт большого диаметра обладает огромным моментом инерции, просто так его не раскрутишь и не остановишь, а без быстрого и точного изменения тяги не получится управлять полученным аппаратом.
Плюс, вертолет это не автомобиль, двигатель у вертолета обычно работает в близком к оптимальному режиме, его не требуется постоянно разгонять и тормозить. ГТД итак достаточно экономичны, вряд ли получится сделать более экономичную систему, используя тот же тепловой двигатель, плюс дополнительный источник потерь в виде двойной конвертации энергии.
Хороший аргумент. Спасибо.
Учитывая, что согласно Вашему проекту винты жестко закреплены на валах двигателей, получается, что двигатели у Вас электрические. Позвольте не расписывать, почему.
"Топливо" же(в данном случае аккумуляторы) у Вас расположено в верхней части аппарата. < sarcasm> Плюс к устойчивости< /sarcasm>
При отказе(попадании) одного из двигателей, квадросхема перестает быть устойчивой. Выходит, живучесть машины снижена вчетверо(грубая прикидка)
Ширина фюзеляжа — а Вы не думали, что классическая схема не накладывала столь уже серьезных ограничений на ширину фюзеляжа, как, скажем, лобовое сопротивление или парусность? Применялся принцип минимальной достаточности: если в ТЗ сказано, что должен влезть БТР, он и влезет. А лишний воздух возить — накладно.
"Топливо" же(в данном случае аккумуляторы) у Вас расположено в верхней части аппарата. < sarcasm> Плюс к устойчивости< /sarcasm>
При отказе(попадании) одного из двигателей, квадросхема перестает быть устойчивой. Выходит, живучесть машины снижена вчетверо(грубая прикидка)
Ширина фюзеляжа — а Вы не думали, что классическая схема не накладывала столь уже серьезных ограничений на ширину фюзеляжа, как, скажем, лобовое сопротивление или парусность? Применялся принцип минимальной достаточности: если в ТЗ сказано, что должен влезть БТР, он и влезет. А лишний воздух возить — накладно.
«Топливо» же(в данном случае аккумуляторы) у Вас расположено в верхней части аппарата. Плюс к устойчивостипоясните пожалуйста.
При отказе(попадании) одного из двигателей, квадросхема перестает быть устойчивой.А при отказе одного единственного двигателя вертолета, он разве остается устойчивым? Живучесть квадрокоптера и вертолета равны.
Квадрокоптер при отказе одного из двигателей может сохранять стабилизацию, гексакоптер или октокоптер, в принципе, может совершить мягкую посадку с одним неработающим мотором, однако 100 % рассчитывать на это нельзя (например, при разрыве хотя бы одной лопасти, вибрация из-за дисбаланса увеличивается настолько, что контроллер перестаёт работать, как следствие, неуправляемое падение). Но уже существуют экспериментальные квадрокоптеры, которые могут стабилизировать полёт и совершить посадку при потере одного из двигателей.статья в Википедии
А при отказе одного единственного двигателя вертолета, он разве остается устойчивым?
Да. И спокойно сядет, хоть и жёстко.
UFO just landed and posted this here
Живучесть квадрокоптера и вертолета равны.
Спорный вопрос. При потере одного из двигателей квадрокоптера автоматически теряется тяга и второго, противоположного. Конечно, если у него с четырьмя винтами имелся двойной запас подъемной силы, то ничего страшного, но делать машины с такими запасами невыгодно.
По авторотации — если у квадрокоптера имеются автоматы перекоса, то теоретически он тоже может сесть на авторотации. Но во-первых это очень сложная, а следовательно дорогая конструкция, а во-вторых инерция четырех маленьких роторов гораздо меньше инерции одного большого и посадка на авторотации на порядки усложнится.
Вы, кажется, пытаетесь переизобрести ми-32: http://topwar.ru/14739-proekt-unikalnogo-3-h-vintovogo-vertoleta-mi-32.html
Не четыре, но уже два есть, как в поперечном, так и продольном исполнении, а сколько еще соосных, это тоже все мультикоптеры?
У Ми-12, к примеру, четыре двигателя на два винта.
А как вам вот такое чудо — НН-43В?

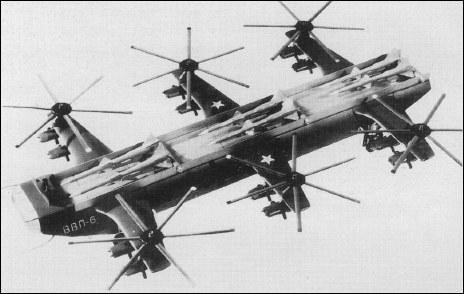
Или проект тяжёлого военно-транспортного вертолёта Як ВВП-6:

У Ми-12, к примеру, четыре двигателя на два винта.
А как вам вот такое чудо — НН-43В?

Или проект тяжёлого военно-транспортного вертолёта Як ВВП-6:

А какие преимущества дает такая схема?
Возможно сплошной маркетинг, но все же:
По мнению фирмы Kaman, схема вертолета с перекрещивающимися несущими винтами является наиболее эффективной при выполнении операций с вертикальным подъемом грузов, так как она обеспечивает уменьшение расхода мощности, массы конструкции, уровня шума, вибраций, затрат на техническое обслуживание, а также безопасность, связанную с отсутствием рулевого винта.
Системы вертолета максимально упрощены, вертолет спроектирован с учетом требования минимального технического обслуживания в полевых условиях. Отсутствуют гидравлические приводы, сервозакрылки лопастей несущего винта обеспечивают малые усилия на ручке управления; управление полетом ручное. В электросистеме используется только постоянный ток; свинцово-кислотная аккумуляторная батарея не требует технического обслуживания.
Спасибо, просветили.
Маркетинг, но не все.
Каманы используются в условиях высокогорья и ограниченного пространства как раз из-за меньшей реактивности по газу(дернул ручку — вертолет прыгнул вверх) и, за счет перекрытия винтов и отсутствия рулевого, меньших шансов что-то зацепить.
Используются как поисково-спасательные, пожарные и, простигосподи, трелевочные.
Каманы используются в условиях высокогорья и ограниченного пространства как раз из-за меньшей реактивности по газу(дернул ручку — вертолет прыгнул вверх) и, за счет перекрытия винтов и отсутствия рулевого, меньших шансов что-то зацепить.
Используются как поисково-спасательные, пожарные и, простигосподи, трелевочные.
Думаю эту схему разумно сравнивать с соосной. Основные на мой взгляд плюсы:
— Конструкция проще и, как следствие, дешевле
— Нет опасности перехлеста лопастей (В этом я не уверен, кто может подтвердить?)
— Конструкция проще и, как следствие, дешевле
— Нет опасности перехлеста лопастей (В этом я не уверен, кто может подтвердить?)
Если мне не изменяет память, классическая схема имеет наибольший КПД.
А квадрокоптер на авторотации садиться сможет?
Если есть автоматы перекоса лопастей
Ой, ли!
Возьмем, скажем, схему Белла-Хиллера. Вполне себе автомат.
Поавторотируйте на ней.
Это я к тому, что поосторожнее нужно быть с заявленими.
Возьмем, скажем, схему Белла-Хиллера. Вполне себе автомат.
Поавторотируйте на ней.
Это я к тому, что поосторожнее нужно быть с заявленими.
В вертолетостроении используются схемы Юрьева и Сикорского. Про схему Белла-Хиллера не слышал, буду рад если расскажете где применяется такая схема.
Это я к тому, что поосторожнее нужно быть с заявленими.Поосторожнее надо быть когда дорогу переходишь. Здесь никто не «заявляет», здесь общаются, обсуждают, не надо накалять обстановку.
Много где такая схема применяется, из-за простоты и дешевизны.
UH-1 Ирокез и прозводные (Кобра и т.д.)
Robinson R22 и R44
UH-1 Ирокез и прозводные (Кобра и т.д.)
Robinson R22 и R44
народ с больших высот вниз ротором спускается — тоже в некотором роде авторотация — батарею экономят на винтах постоянного шага — быстрый спуск с сохранением управляемости и действительно экономией заряда. Главное вовремя перевернуться в нормальное положение.
А если рассмотреть конвертопланы как Bell V-22 Osprey?
Только сделать его реактивным.
И почему они не применяються? не слышал о полноразмерных моделях или макетах?
Как в фантастике этакий реактивный конвертоплан квардркоптер ?
Только сделать его реактивным.
И почему они не применяються? не слышал о полноразмерных моделях или макетах?
Как в фантастике этакий реактивный конвертоплан квардркоптер ?
Мне кажется, технически очень сложно будет реализовать реактивные двигатели с одной вращательной степенью свободы.
Применяются.
Только в самолетах.
Гуглится по "Самолет с ВВП"
Почему не массово: вертикальный взлет на ТРД — очень дорогое удовольствие.
Пример: Харриер при вертикальном взлете теряет до трети своего радиуса действия.
Только в самолетах.
Гуглится по "Самолет с ВВП"
Почему не массово: вертикальный взлет на ТРД — очень дорогое удовольствие.
Пример: Харриер при вертикальном взлете теряет до трети своего радиуса действия.
Вы не поняли, имеется ввиду реактивный двигатель с изменяемым вектором тяги, т.е. двигатель как на конвертоплане, только реактивный, наверное это имел ввиду Arxitektor.
У меня в комментарии написано же
У меня в комментарии написано же
реактивные двигатели с одной вращательной степенью свободы.
Чего именно я не понял?
Двигатели с управляемым вектором тяги применяются давно и активно.
Вот, модели самолетов с ВВП, использующие двигатели с УВТ, которые первые пришли на ум:
Харриер, Як-38, Як-141, F-35, YF-32
А также модели с управляемым вектором тяги, не имеющие возможности ВВП:
Су-30, Су-37, МиГ-29ОВТ, МиГ-35, ПАК-ФА F-22
Вот только — да, весь двигатель вращать никто и не думает. Достаточно поворотного сопла.
Двигатели с управляемым вектором тяги применяются давно и активно.
Вот, модели самолетов с ВВП, использующие двигатели с УВТ, которые первые пришли на ум:
Харриер, Як-38, Як-141, F-35, YF-32
А также модели с управляемым вектором тяги, не имеющие возможности ВВП:
Су-30, Су-37, МиГ-29ОВТ, МиГ-35, ПАК-ФА F-22
реактивные двигатели с одной вращательной степенью свободы
Вот только — да, весь двигатель вращать никто и не думает. Достаточно поворотного сопла.
ТРД Пегас — двигатель Харриера, как раз имеет одну вращательную степень свободы для вектора выхлопа.
Или в хотите непременно вращать вал двигателя? «Аэродинамика? Нет, не слышал».
Или в хотите непременно вращать вал двигателя? «Аэродинамика? Нет, не слышал».
Я ничего не хочу, пользователь Arxitektor предложил конвертоплану Bell V-22 Osprey поставить вместо винтовых двигателей реактивные, вот и зашел разговор...
Я ему ответил.
UFO just landed and posted this here
Что означает ТС?
ТопикСтартер (человек, создавший тему на форуме)
Arxitektor (если речь о нем) вроде не постоянно придумывает что-то, всего-то один раз идею подал)
Как только вы разберетесь с изобилием мягких знаков, вы узрите, что КПД реактивного двигателя высок на больших скоростях, а на малых — низок.
Толкать лодки, дирижабли, велосипеды и отрывать груз рывком с земли невыгодно энергетически.
Если, конечно, военные, которым обычно плевать на энергозатраты, не закажут ТРД(ТРДД, ТР...)-пепелац вертикального взлёта во что бы то ни стало.
РД выгоден как приложение к клину, которым, по сути, является крыло в макро-смысле, в областях скоростей, где винты не справляются принципиально.
Толкать лодки, дирижабли, велосипеды и отрывать груз рывком с земли невыгодно энергетически.
Если, конечно, военные, которым обычно плевать на энергозатраты, не закажут ТРД(ТРДД, ТР...)-пепелац вертикального взлёта во что бы то ни стало.
РД выгоден как приложение к клину, которым, по сути, является крыло в макро-смысле, в областях скоростей, где винты не справляются принципиально.
Был вот такой прототип
Если поставить вместо винтов компактный реактивный двигатель как в истребителе. То конструкция вероятно не взлетит, а если и взлетит, то потребует для зависания в воздухе толстый шланг топлива приделанный к бензовозу. Но летать конечно сможет быстро. Всё потому, что реактивные двигатели имеют весьма паршивую статическую тягу(тягу при нулевой и низкой скорости). Зависимость КПД от ометаемой площади никуда не девается.
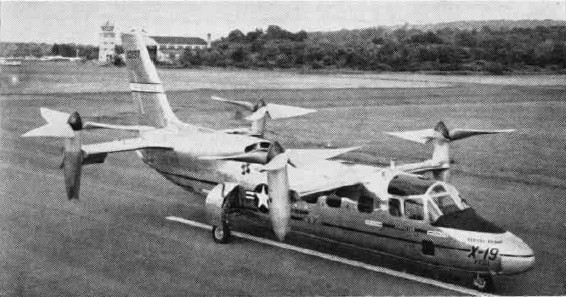
Поиск по википедии выявил 3 летающих больших квадротора (у всех пропеллеры поворотные, то есть конвертопланы):

Curtiss-Wright X-19 (1963)

Bell X-22 (1966)

И разрабатываемый сейчас Bell Boeing Quad TiltRotor
Curtiss-Wright X-19 (1963)
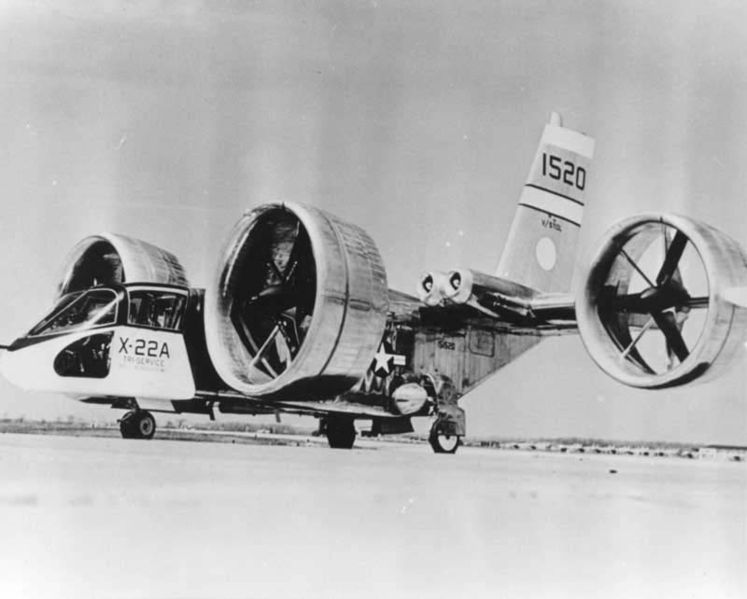
Bell X-22 (1966)
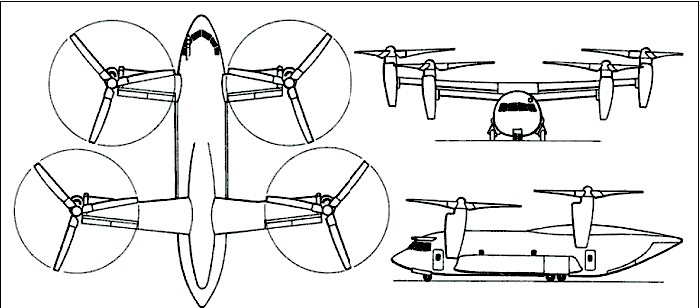
И разрабатываемый сейчас Bell Boeing Quad TiltRotor
Опять таки, узкий фюзеляж....
У Ми-12 (B-12) достаточного размера фюзеляж?
Мнение Сергея Сикорского:
Давайте обсудим телепортацию?
В 1961 году Дементьев официально утвердил задание на проработку вертолета грузоподъемностью 20-25 т. 3 мая 1962 года последовало постановление Совета Министров СССР о разработке В-12 с грузовой кабиной, аналогичной кабине гигантского самолета Ан-22.
Для удешевления разработки, а также ускорения постройки и внедрения вертолёта конструкторы решили создавать его путем удвоения винтомоторных групп Ми-6 (несущий винт, силовая установка, главный редуктор и система управления), уже испытанного и находящегося в серийном производстве и широкой эксплуатации. Проект воздушного гиганта представлял собой четырёхдвигательный аппарат по двухвинтовой поперечной схеме.
По концам каждой ферменной консоли-крыла находилась винтомоторная гондола с двумя газотурбинными двигателями Д-25ВФ мощностью по 6500 л.с. каждый. Крыло обратного сужения имело небольшое поперечное V. Внутри него проходит трансмиссионный вал, синхронизирующий обороты обоих винтов. Горючее находилось в крыльевых и наружных подвесных топливных баках.
В кабине могло разместиться 196 солдат или 158 раненых на носилках.
Однако, несмотря на свои уникальные характеристики, В-12 так и не поступил в серийное производство и эксплуатацию. Причин тому было несколько. Главная заключалась в том, что задача, для выполнения которой создавался В-12, – обеспечение мобильного базирования баллистических ракет стратегического назначения – к концу 60-х годов потеряла актуальность. Другие виды военных грузов не нуждались в таком дорогостоящем средстве доставки, как вертолет. Кроме того, Саратовский авиационный завод, готовившийся к производству В-12, к моменту принятия решения о запуске гиганта в серию оказался загруженным изготовлением другого вида продукции. Началась разработка тяжелого вертолета третьего поколения Ми-26, уступающего В-12 по грузоподъемности, но превосходящего его по технико-экономическим показателям...
Мнение Сергея Сикорского:
Перед инженерно-техническим достижением, коим является Ми-12, можно только снять шляпу…
Этот вертолет является единственным в своем роде и будет использоваться для выполнения уникальных операций. Я имею ввиду экспедиции в районы Арктики или поиски нефтяных месторождений. Вертолет заменит железную дорогу там, где до сих пор еще не ступала нога человека.
Давайте обсудим телепортацию?
Повальное увлечение квадрокоптерами это конечно в чем-то хорошо, но я совершенно не понимаю стремления энтузиастов квадрокоптеростроения заменить ими все остальные виды летательных аппаратов.
Итак, чем же хорош квадрокоптер (и прочие n-коптеры, где n>=3)?
А теперь навкидку недостатки.
В итоге, эта схема наследует все недостатки вертолетов, и привносит свои. Соответственно, практического смысла ее использование не имеет.
Стоит отметить одно исключение. Это конвертопланы. У них те же недостатки, но только в режиме вертикального взлета. В самолетном режиме конвертоплан превращается в плохонький, но самолет, обладающий меньшим расходом топлива, большей дальностью, и скоростью. Но и то, надежность того же V-22 оставляет желать лучшего, при очень высокой сложности и стоимости этого аппарата.
Итак, чем же хорош квадрокоптер (и прочие n-коптеры, где n>=3)?
- Простота конструкции. Крестовина, на концах четыре мотора, в центре батарея и электроника. Но. Это справедливо лишь для небольших аппаратов, массой до нескольких десятков килограмм. Тяжелый квадрокоптер это уже вертолет с четыремя и более роторами, к которым прилагается четыре автомата перекоса. То есть, по сути мы получаем как минимум втрое более сложную конструкцию, при этом без каких-либо преимуществ в надежности. Почему нельзя просто сделать винт на палке, как на мелочи? Ответ прост — инерция. Ротор диаметром в пять метров уже не затормозишь и не разгонишь за долю секунды, аппарат будет неуправляем.
- Надежность. Опять-таки, справедливо только для мелочи.
- Маневренность. Сравнима с вертолетами.
- Простота управления. В основном из-за большого количества автоматики на дронах. В ручном режиме управлять такой штукой не проще, чем вертолетом, и уж тем более, самолетом. А их ведь тоже можно автоматизировать.
- Больший размер грузового отсека. Несомненно, у ЛА с разнесенными винтами грузовой отсек можно сделать больше. Вопрос, зачем это нужно? Переносить легкие, но объемные грузы на небольшие расстояния? Не самая частая задача. В грузоподъемности многороторная схема проигрывает однороторной из-за меньшего КПД нескольких винтов меньшего диаметра. Плюс, большой фюзеляж — большая парусность и большее лобовое сопротивление. Из-за этого дальность становится еще ниже. А если еще и бронировать все подряд (особенно понравилась идея делать защитные кольца для винтов из брони, полезность которых, мягко говоря, сомнительна), то ставлю на то, что это чудо даже не оторвется от земли.
А теперь навкидку недостатки.
- Выше масса.
- Выше сложность. Это не игрушечных размеров дрон, а полномасштабное воздушное судно. Аэродинамика вещь такая, линейно она не масштабируется. Да и моменты инерции тоже.
- Ниже КПД. Уже писали, почему.
- Надежность тоже ниже. Вытекает из повышенной сложности.
- Хуже все остальные эксплуатационные параметры.
В итоге, эта схема наследует все недостатки вертолетов, и привносит свои. Соответственно, практического смысла ее использование не имеет.
Стоит отметить одно исключение. Это конвертопланы. У них те же недостатки, но только в режиме вертикального взлета. В самолетном режиме конвертоплан превращается в плохонький, но самолет, обладающий меньшим расходом топлива, большей дальностью, и скоростью. Но и то, надежность того же V-22 оставляет желать лучшего, при очень высокой сложности и стоимости этого аппарата.
А вот и симуляция, правда не понятно, почему нельзя пуски с земли осуществлять:
Два техника из видео так легко и не принужденно подняли пулеметную ленту и подключили к боеукладу...) Очень приятно смотреть, как американская техника разрывается в клочья.
Хотя идея очень не плохая. Дрон с оружейной платформой, который можно перевозить в малогабаритном гражданском транспорте. ГРУ и ФСБ будут счастливы.
"Симуляция".
Ха, тогда любой ролик из компьютерной игры или кадры из фильма можно назвать симуляцией.
Этот ролик — ненаучная фантастика, причем во всем. Даже если такая штука не противоречила законам физики, ее боевая ценность была бы равна нулю.
Ха, тогда любой ролик из компьютерной игры или кадры из фильма можно назвать симуляцией.
Этот ролик — ненаучная фантастика, причем во всем. Даже если такая штука не противоречила законам физики, ее боевая ценность была бы равна нулю.
Согласен. Как симуляция идеи без учета законов. Какое определение подходит больше? Фантазия?
"Ценность" этой вундервафли примерно такая же как и у AT-AT из "Звездные войны" — нанести максимальный урон пока не будет уничтожен тяжелым вооружением. Очень удобно, когда война происходит в мире одной из RTS, например Red Alert или Generals.
крупнокалиберный пулемет допустим ок, но зачем поднимать в воздух бандуру с ракетами, если их можно прям с земли запустить?
Volocopter VC200 — самый большой на сегодняшний день?
Тут есть еще такая подстава с большими винтами, что если встречный поток воздуха набегает не вдоль оси винта (как раз как в вертолетах и квадрокоптерах), подъемная сила лопасти будет отличаться в разных участках ее траектории (половину окружности лопасть движется навстречу набегающему воздуху и скорости складываются, вторую половину — наоборот). Из-за этого жесткий винт будет кренить. Кстати, это именно та причина, по которой бумеранг летит не прямо, а по дуге, разница подъемных сил его переворачивает.
Чтобы вертолет не переворачивало этот эффект компенсируется циклическим изменением угла атаки. При этом лопасть еще и двигается вверх-вниз. И даже еще интереснее, у нее скорость кромки циклически меняется относительно скорости ротора (я не помню, как это физически объясняется) То есть пол оборота лопасть движется быстрее ротора, а пол оборота — медненнее.
То есть вообще лопасть живет очень насыщенной жизнью и на нее действуют знакопеременные нагрузки по двум осям даже без автомата перекоса. А для того чтобы винт не развалился, крепление лопасти к ротору имеет 3 степени свободы (кардан или торсион).
Так что, думается мне, начиная с определенного размера и с определенных требований к скорости, эта штука ну никак не сможет быть проще вертолета.
Чтобы вертолет не переворачивало этот эффект компенсируется циклическим изменением угла атаки. При этом лопасть еще и двигается вверх-вниз. И даже еще интереснее, у нее скорость кромки циклически меняется относительно скорости ротора (я не помню, как это физически объясняется) То есть пол оборота лопасть движется быстрее ротора, а пол оборота — медненнее.
То есть вообще лопасть живет очень насыщенной жизнью и на нее действуют знакопеременные нагрузки по двум осям даже без автомата перекоса. А для того чтобы винт не развалился, крепление лопасти к ротору имеет 3 степени свободы (кардан или торсион).
Так что, думается мне, начиная с определенного размера и с определенных требований к скорости, эта штука ну никак не сможет быть проще вертолета.
Из кружков удалите центральную часть, там низкая скорость вращения винта. Если принимать в учет только 30% окружности самые удаленные от центра, картина резко меняется, оказывается что корпус существенно ничего не экранирует, затенение потока воздуха минимальное и воздушный поток легко обходит овальный корпус при движении потока сверху вниз.
Sign up to leave a comment.
Мысли вслух. Четыре лучше чем один… Или концепция транспортного квадрокоптера