Comments 21
Конструктор крутой, но цены на него не радуют.
Немного оптимизаций:
А так очень хорошая работа, впечатляет. Виден потенциал для реализации быстрой сборки =)
- Может ошибаюсь, но разве нельзя просканировать три стороны кубика и вычислить остальные? Сканирование в два раза быстрее будет.
- Не возвращать манипуляторы обратно в начальное положение, а оставлять их на месте, дабы не тратить время на механику. Понимаю, что сложности небольшие будут с относительным позиционированием, но ведь можно сделать.
- Не ждать завершения действий некоторых и начинать выполнять следующие. Например, не ждать когда поддерживающая платформа при старте опуститься, а почти сразу начинать сканирование (в тот момент, когда платформа уже не мешает).
А так очень хорошая работа, впечатляет. Виден потенциал для реализации быстрой сборки =)
Еще, почему бы не сделать множество калибровок в зависимости от освещения? Т.е. иметь датчик освещения, относительно него выбирать нужную калибровку? По идее и изоляция не будет нужна потом сканирующей области.
Насколько я понимаю изоляция нужна от паразитного освещения, которое меняет «баланс белого». Т.е. даже при калибровке под освещение человек в красной толстовке может повлиять на отраженный свет и сбить показания.
edit. камера наверное все же лучше, можно поместить в видимую часть кадра, эталонный цвет и на основе его править баланс автоматически.
edit. камера наверное все же лучше, можно поместить в видимую часть кадра, эталонный цвет и на основе его править баланс автоматически.
>>> Может ошибаюсь, но разве нельзя просканировать три стороны кубика и вычислить остальные? Сканирование в два раза быстрее будет.
Трёх сторон недостаточно. На «невидимых» гранях есть три ребёрных элемента, расположение которые вообще никак не вычисляются на основании видимых сторон. Методом исключения вычисляются расцветки этих элементов (и то — не всегда), но абсолютно нет информации на каком именно месте какой элемент находится.
Трёх сторон недостаточно. На «невидимых» гранях есть три ребёрных элемента, расположение которые вообще никак не вычисляются на основании видимых сторон. Методом исключения вычисляются расцветки этих элементов (и то — не всегда), но абсолютно нет информации на каком именно месте какой элемент находится.
На рисунке кубик повёрнут так, что 'невидимые' стороны обращены к зрителю, неизвестные рёберные грани окрашены чёрным

Было бы круто узнать, сколько же все-таки достаточно :)
Более того — даже на трёх «видимых» сторонах ни черта, на самом деле, не видно.
Для определения трёхцветного углового элемента достаточно видеть только два его цвета из трёх. В видимой области три из семи угловых элементов представлены только одной гранью.
Что касается ребёрных двухцветных элементов, то информации только об одном из цветов уже не хватает. Из девяти видимых только три однозначно определяются.
>>> Было бы круто узнать, сколько же все-таки достаточно :)
Увы, все 6. Только просканировав все грани, можно точно определить двухребёрные элементы.
Для определения трёхцветного углового элемента достаточно видеть только два его цвета из трёх. В видимой области три из семи угловых элементов представлены только одной гранью.
Что касается ребёрных двухцветных элементов, то информации только об одном из цветов уже не хватает. Из девяти видимых только три однозначно определяются.
Здесь кубик повёрнут к зрителю своей видимой частью. Чёрным цветом помечено 6 рёберных и 3 угловых элемента, о которых нет достаточно информации для их идентификации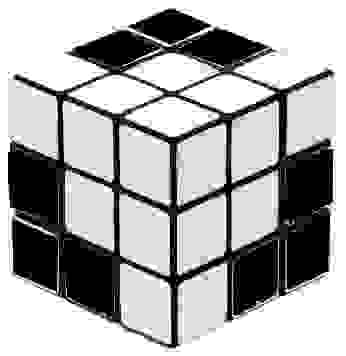

>>> Было бы круто узнать, сколько же все-таки достаточно :)
Увы, все 6. Только просканировав все грани, можно точно определить двухребёрные элементы.
Но ведь далеко не все положения достижимы. Если например просканировать 5 граней, то, возможно, будет только одно достижимое состояние шестой грани. Это только гипотеза, конечно. Надо попробовать доказать.
В некоторых случаях 5 сторон может оказаться достаточно, но, как правило, — нет. Угловые и центральный на неизвестной стороне определяются однозначно, а вот ребёрные — не всегда.
Поясню на примере. Допустим, два ребра имеют один из цветов — зелёный. При этом зелёные грани окажутся на видимых сторонах, а незелёные — на 6-й невидимой. Узнать окончательный расклад можно, только посмотрев на последнюю сторону.
Поясню на примере. Допустим, два ребра имеют один из цветов — зелёный. При этом зелёные грани окажутся на видимых сторонах, а незелёные — на 6-й невидимой. Узнать окончательный расклад можно, только посмотрев на последнюю сторону.
'Неизвестная' 6-я сторона на рисунке - верхняя.

>>> Но ведь далеко не все положения достижимы.
Тут согласен, но вариант который я только что привёл, может возникнуть запросто.
Тут согласен, но вариант который я только что привёл, может возникнуть запросто.
Спасибо за отзыв!
Действительно, есть мнение, что сканировать все стороны не обязательно. Но мне не удалось найти математического доказательства или опровержения этого факта, или алгоритма, который позволил бы это сделать. Для следующего поколения это нужно, конечно, видимо придётся разбираться в математике. Если вы найдёте ответ, не забудьте поделиться)
По поводу оптимизации движений вы тоже абсолютно правы. Но такие оптимизации позволят выиграть секунды, которые для данного проекта не критичны. Напротив, мы специально замедлили моторы, чтобы все движения были различимы. А платформа так это вообще отдельное шоу имхо)
Действительно, есть мнение, что сканировать все стороны не обязательно. Но мне не удалось найти математического доказательства или опровержения этого факта, или алгоритма, который позволил бы это сделать. Для следующего поколения это нужно, конечно, видимо придётся разбираться в математике. Если вы найдёте ответ, не забудьте поделиться)
По поводу оптимизации движений вы тоже абсолютно правы. Но такие оптимизации позволят выиграть секунды, которые для данного проекта не критичны. Напротив, мы специально замедлили моторы, чтобы все движения были различимы. А платформа так это вообще отдельное шоу имхо)
А есть видео, где машина работает в полную мощность по скорости? Очень хотелось бы увидеть, на что она способна =)
Такого видео нет, но там ничего сверхъестественного нет. Просто результат на несколько секунд быстрее. Мы не оптимизировали движения манипуляторов по отношению друг к другу, они просто могут двигаться быстрее, примерно в два раза. При этом время на снятие показаний с фоторезисторов, конечно, не уменьшается.
на это можно смотреть бесконечно!
В связи с этим вопрос — скорость манипуляторов ограничена принудительно? В сети был ролик, где кубик собирают в разы быстрее, на лего, кажется.
Спасибо за зрительный экстаз :)
В связи с этим вопрос — скорость манипуляторов ограничена принудительно? В сети был ролик, где кубик собирают в разы быстрее, на лего, кажется.
Спасибо за зрительный экстаз :)
Не за что, мы сами тащимся :)
Здесь мы не пытались бить рекорды скорости, это бессмысленно с таким методом сканирования. Мы не стали ставить сюда камеру, потому что было интересно отсканировать куб, используя low-end детали: фоторезисторы и светодиоды.
Моторчики даже в этой версии могут двигаться гораздо быстрее, но мы решили, что с такой скоростью будет зрелищнее :)
Здесь мы не пытались бить рекорды скорости, это бессмысленно с таким методом сканирования. Мы не стали ставить сюда камеру, потому что было интересно отсканировать куб, используя low-end детали: фоторезисторы и светодиоды.
Моторчики даже в этой версии могут двигаться гораздо быстрее, но мы решили, что с такой скоростью будет зрелищнее :)
И правда, чуть-чуть быстрее :)
Sign up to leave a comment.
Машина для сборки кубика Рубика на основе системы FAC