
Как бы вы подошли к симуляции дождя, ну или любого другого продолжительного физического процесса?
Симуляцию, будь это дождь, поток воздуха над крылом самолёта или же падающий по ступенькам слинки (помните игрушку-пружинку радугу из детства?), можно представить, если знать следующее:
- Состояние всего в момент начала симуляции.
- Как это состояние меняется из одного момента времени в другой?
Под «состоянием всего» я подразумеваю любые переменные данные, которые либо определяют как выглядит окружение, либо же изменения, происходящие с течением времени. Как пример состояния можно привести положение капли дождя, направление ветра, либо же скорость каждой части пружинки слинки.
Если положить, что всё наше состояние окружения это один большой вектор
 , то можно сформулировать нужные нам данные, указанные выше, в следующее:
, то можно сформулировать нужные нам данные, указанные выше, в следующее:- Найти значение
 , удовлетворяющее
, удовлетворяющее  ?
? - Найти функцию
 такую, что
такую, что  .
.
Зачем нам надо хранить состояние всего в одном векторе, я объясню чуть позже. Это один из тех случаев, когда кажется что мы перебарщиваем с обобщением задачи, но я обещаю, в таком подходе есть свои интересности.
Теперь взглянем как можно хранить всю информацию об окружении в одном векторе на простом примере. Допустим, у нас есть 2 объекта в 2D симуляции. Каждый объект определяется своим положением
 и скоростью
и скоростью  .
.
Таким образом, чтобы получить вектор
, нам надо объединить вместе вектора  в один, состоящий из 8 компонент, вот так:
в один, состоящий из 8 компонент, вот так:
Если вас смущает, почему мы хотим найти
 , а не начальное определение
, а не начальное определение  , то смысл в том, что производная нам нужна как выражение, зависящее только от текущего состояния,
, то смысл в том, что производная нам нужна как выражение, зависящее только от текущего состояния,  , констант и самого времени. Если же это невозможно, то наверняка какая либо информация о состоянии не была учтена.
, констант и самого времени. Если же это невозможно, то наверняка какая либо информация о состоянии не была учтена.Начальное состояние
Чтобы определить начальное состояние симуляции, нужно определить вектор
 . Таким образом, если начальное состояние нашего примера с двумя объектами выглядит приблизительно так:
. Таким образом, если начальное состояние нашего примера с двумя объектами выглядит приблизительно так: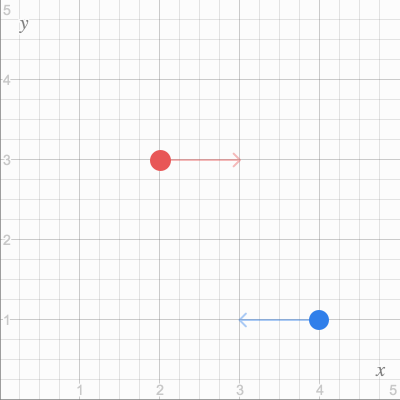
То в векторном виде это можно представить следующим образом:

Если объединить это всё в один вектор, мы получим нужный нам
:
Производная функция
определяет начальное состояние и теперь всё что нам нужно это найти способ перехода из начального состояния в состояние происходящее мгновение после него, а с полученного состояния ещё чуть дальше во времени и так далее. Для этого, решим уравнение
для . Найдём производную от :
Ого! Высокая получилась формула! Но можно привести её в более читаемый вид, если разобьём наш вектор
обратно на составные части.
 и
и  связаны аналогичными правилами, равно как и
связаны аналогичными правилами, равно как и  с
с  , поэтому несмотря на кучу выражений сверху, всё что нам действительно нужно найти, это следующие 2 вещи:
, поэтому несмотря на кучу выражений сверху, всё что нам действительно нужно найти, это следующие 2 вещи:
От определения этих двух производных и зависит качество симуляции, именно в них вся сила. И чтобы симуляция не походила на программу где всё случается хаотичным образом, можно обратиться к физике за вдохновением.
Кинематика и динамика
Кинематика и динамика — необходимые ингредиенты для создания интересной симуляции. Начнём с самых основ на нашем примере.
За положение в пространстве отвечает
, и первая производная положения точки по времени это его скорость . В свою очередь, производная от скорости по времени это ускорение,  .
.Может показаться, что мы уже нашли нужную нам функцию
, т.к. мы уже знаем следующее:
И в самом деле мы блестяще справились с
 , т.к. это часть нашего вектора состояния
, т.к. это часть нашего вектора состояния  , но нам нужно ещё чуточку разобрать вторую формулу, потому что с не всё так просто.
, но нам нужно ещё чуточку разобрать вторую формулу, потому что с не всё так просто.Тут нам поможет второй закон Ньютона:
 . Если предположить что масса наших объектов известна, то переставив переменные в выражении, мы получим:
. Если предположить что масса наших объектов известна, то переставив переменные в выражении, мы получим:
Так, погодите ка,
и  не являются частью , поэтому это сложно назвать продвижением (помните, нам нужна производная функция зависящая только от и
не являются частью , поэтому это сложно назвать продвижением (помните, нам нужна производная функция зависящая только от и  ). Но тем не менее мы продвинулись вперёд, потому что мы нашли все полезные формулы которые определяют поведение объектов в нашем физическом мире.
). Но тем не менее мы продвинулись вперёд, потому что мы нашли все полезные формулы которые определяют поведение объектов в нашем физическом мире. Предположим, что в нашем простом примере, единственной силой, которая воздействует на объекты является гравитационное притяжение. В таком случае, мы можем определить
, используя закон всемирного тяготения Ньютона:
Где
 это гравитационная постоянная
это гравитационная постоянная  , а
, а  и
и  это массы наших объектов (которые, мы предположим, являются константами).
это массы наших объектов (которые, мы предположим, являются константами).Для создания самой симуляции, также нам понадобится направление и как то указать
 через компоненты вектора . Если предположить что
через компоненты вектора . Если предположить что  это сила действующая на первый объект, то можно сделать это следующим образом:
это сила действующая на первый объект, то можно сделать это следующим образом:![$\begin{aligned} \vec F_1 &= G \frac{m_1 m_2}{|\vec x_2 - \vec x_1|^2} \left[ \frac{\vec x_2 - \vec x_1}{|\vec x_2 - \vec x_1|} \right] = G \frac{m_1 m_2(\vec x_2 - \vec x_1)}{|\vec x_2 - \vec x_1|^3} \\ \\ \vec F_2 &= G \frac{m_2 m_1}{|\vec x_1 - \vec x_2|^2} \left[ \frac{\vec x_1 - \vec x_2}{|\vec x_1 - \vec x_2|} \right] = G \frac{m_2 m_1(\vec x_1 - \vec x_2)}{|\vec x_1 - \vec x_2|^3} \end{aligned}$](https://habrastorage.org/getpro/habr/formulas/101/38f/2b0/10138f2b0af4a45e210499742ffd57d9.svg)
Подытожим. Изменение состояний в нашей системе из двух объектов полностью выражено через переменные
 . И изменения такие:
. И изменения такие:
Теперь у нас есть всё, что отличает нашу симуляцию от всех других симуляций:
и .
Но как, имея строго определённую симуляцию, превратить её в красивую анимацию?
Если у вас был опыт написания симуляции или игры, то возможно вы предложите нечто такое:
x += v * delta_t
v += F/m * delta_tНо давайте чуть остановимся и разберём почему это сработает.
Дифференциальные уравнения
Прежде чем мы приступим к реализации, нужно определиться, какая информация у нас уже имеется и что нам нужно. У нас есть значение
, которое удовлетворяет , так же есть , удовлетворяющее  . А нужна нам функция, которая даст нам состояние системы в любой момент времени. Математически, нам нужна функция .
. А нужна нам функция, которая даст нам состояние системы в любой момент времени. Математически, нам нужна функция .Имея это ввиду и приглядевшись к
, можно заметить, что это уравнение связывает  со её производной
со её производной  . Это означает что наше уравнение дифференциальное! Обыкновенное дифференциальное уравнение первого порядка, если быть точнее. Если его решить, то мы найдём функцию .
. Это означает что наше уравнение дифференциальное! Обыкновенное дифференциальное уравнение первого порядка, если быть точнее. Если его решить, то мы найдём функцию .Задача нахождения
по данным и называется задачей Коши.Численное интегрирование
Для некоторых примеров задач Коши можно легко найти ответ аналитическим методом, но в сложных симуляциях аналитический подход может оказаться очень сложным. Поэтому попробуем найти способ поиска аппроксимированного решения задачи.
Для примера возьмём простую задачу Коши.
Дано:
 и
и  . Найти аппроксимированное решение для .
. Найти аппроксимированное решение для .Рассмотрим задачу с геометрической точки зрения и посмотрим на значение и касательную в точке
 . Из того, что нам дано, имеем и
. Из того, что нам дано, имеем и 
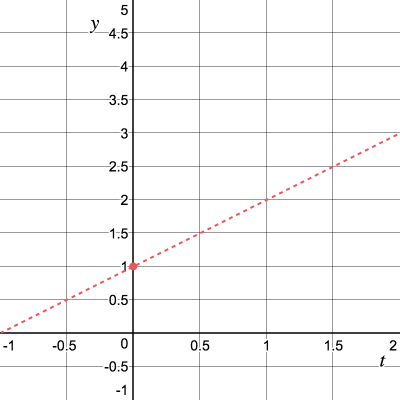
Мы пока не знаем как выглядит
, но мы знаем что возле точки , значение близко к касательной. Теперь постараемся вычислить  для маленького значения
для маленького значения  , воспользовавшись касательной. Для начала попробуем
, воспользовавшись касательной. Для начала попробуем  .
.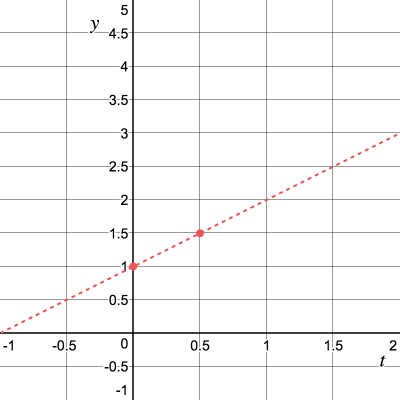
Если расписать, то мы приближаем значение
 следующим образом:
следующим образом:
Так, для
 .
.
Теперь мы можем продолжить вычислять для других точек. Хотя, конечно, мы нашли не точное значение
, но если наше приближённое значение очень близко к точному, то аппроксимированная касательная тоже будет очень близка к действительной!
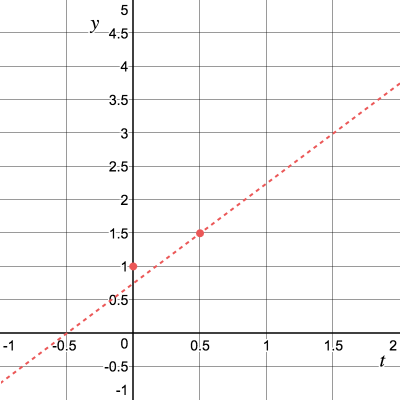
Далее, продвинемся ещё на
единиц вправо по касательной.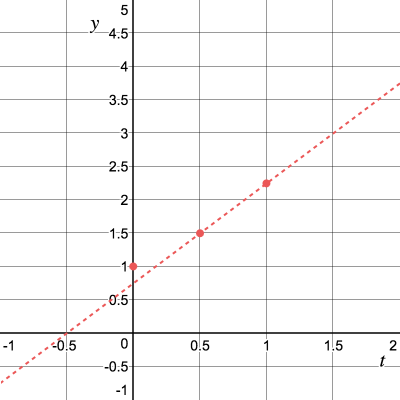
Повторим процесс и получим угловой коэффициент касательной
 :
: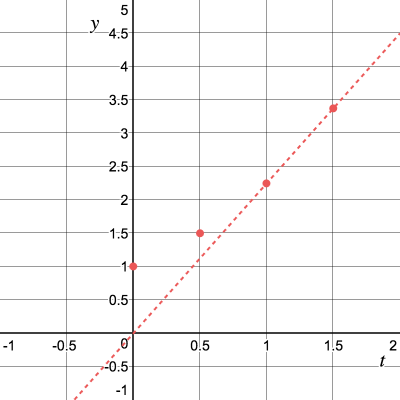
Процедуру можно проводить рекурсивно и для этого выведем формулу:

Данный численный метод решения дифференциальных уравнений называется методом Эйлера. Для общего случая шаг
x += v * delta_t.В нашем конкретном случае, пошаговое решение выглядит так:

Используя данный метод, результаты удобно представлять в виде таблицы:

Оказывается, у нашей задачи есть красивое аналитическое решение
 :
:
Как вы думаете, что произойдёт, если в методе Эйлера уменьшить шаг?
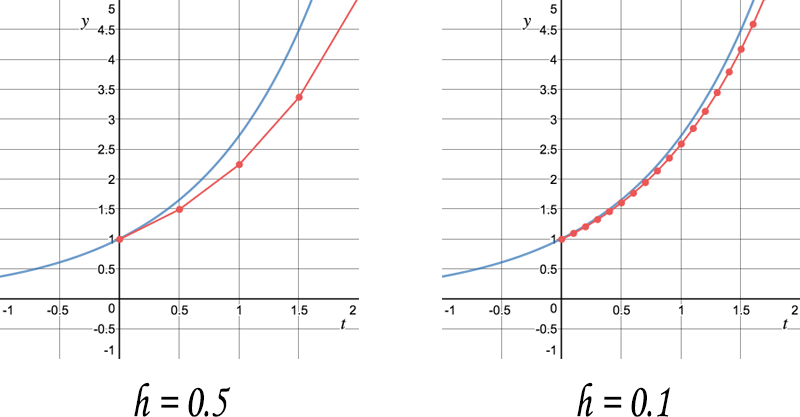
Разница между аппроксимированным и точным решениями уменьшается с уменьшением
! К тому же, вдобавок к уменьшению шага, можно использовать и другие методы численного интегрирования, которые могут привести к лучшему результату, такие как метод средних прямоугольников, метод Рунге-Кутты и метода Адамса.Настало время кодить!
С таким же успехом как мы вывели математическое представление описания симуляции, мы можем написать реализацию симуляции программно.
Т.к. я больше всего знаком с JavaScript, и мне нравится ясность, которую добавляют в код аннотации, все примеры будут написаны на TypeScript.
А начнём мы с версии, в которой подразумевали, что
это одномерный массив чисел, прямо как в нашей математической модели. function runSimulation(
// y(0) = y0
y0: number[],
// dy/dt(t) = f(t, y(t))
f: (t: number, y: number[]) => number[],
// показывает текущее состояние симуляции
render: (y: number[]) => void
) {
// Шаг вперёд на 1/60 секунды за тик
// Если анимация будет 60fps то это приведёт к симуляции в рельном времени
const h = 1 / 60.0;
function simulationStep(ti: number, yi: T) {
render(yi)
requestAnimationFrame(function() {
const fi = f(ti, yi)
// t_{i+1} = t_i + h
const tNext = ti + h
// y_{i+1} = y_i + h f(t_i, y_i)
const yNext = []
for (let j = 0; j < y.length; j++) {
yNext.push(yi[j] + h * fi[j]);
}
simulationStep(tNext, yNext)
}
}
simulationStep(0, y0)
}Оперировать с одномерными массивами не всегда удобно, можно абстрагировать функции сложения и умножения процесса симуляции в интерфейс и получить краткую обобщённую реализацию симуляции используя TypeScript Generics.
interface Numeric<T> {
plus(other: T): T
times(scalar: number): T
}
function runSimulation<T extends Numeric<T>>(
y0: T,
f: (t: number, y: T) => T,
render: (y: T) => void
) {
const h = 1 / 60.0;
function simulationStep(ti: number, yi: T) {
render(yi)
requestAnimationFrame(function() {
// t_{i+1} = t_i + h
const tNext = ti + h
// y_{i+1} = y_i + h f(t_i, y_i)
const yNext = yi.plus(f(ti, yi).times(h))
simulationStep(yNext, tNext)
})
}
simulationStep(y0, 0.0)
}Положительной стороной данного подхода является возможность сконцентрироваться на основе симуляции: что именно эту симуляцию отличает от любой другой. Используем пример симуляции с двумя объектами, упомянутыми выше:
Код симуляция двух объектов
// Состояние симуляции двух объектов в один тик времени
class TwoParticles implements Numeric<TwoParticles> {
constructor(
readonly x1: Vec2, readonly v1: Vec2,
readonly x2: Vec2, readonly v2: Vec2
) { }
plus(other: TwoParticles) {
return new TwoParticles(
this.x1.plus(other.x1), this.v1.plus(other.v1),
this.x2.plus(other.x2), this.v2.plus(other.v2)
);
}
times(scalar: number) {
return new TwoParticles(
this.x1.times(scalar), this.v1.times(scalar),
this.x2.times(scalar), this.v2.times(scalar)
)
}
}
// dy/dt (t) = f(t, y(t))
function f(t: number, y: TwoParticles) {
const { x1, v1, x2, v2 } = y;
return new TwoParticles(
// dx1/dt = v1
v1,
// dv1/dt = G*m2*(x2-x1)/|x2-x1|^3
x2.minus(x1).times(G * m2 / Math.pow(x2.minus(x1).length(), 3)),
// dx2/dt = v2
v2,
// dv2/dt = G*m1*(x1-x1)/|x1-x2|^3
x1.minus(x2).times(G * m1 / Math.pow(x1.minus(x2).length(), 3))
)
}
// y(0) = y0
const y0 = new TwoParticles(
/* x1 */ new Vec2(2, 3),
/* v1 */ new Vec2(1, 0),
/* x2 */ new Vec2(4, 1),
/* v2 */ new Vec2(-1, 0)
)
const canvas = document.createElement("canvas")
canvas.width = 400;
canvas.height = 400;
const ctx = canvas.getContext("2d")!;
document.body.appendChild(canvas);
// Текущее состояние симуляции
function render(y: TwoParticles) {
const { x1, x2 } = y;
ctx.fillStyle = "white";
ctx.fillRect(0, 0, 400, 400);
ctx.fillStyle = "black";
ctx.beginPath();
ctx.ellipse(x1.x*50 + 200, x1.y*50 + 200, 15, 15, 0, 0, 2 * Math.PI);
ctx.fill();
ctx.fillStyle = "red";
ctx.beginPath();
ctx.ellipse(x2.x*50 + 200, x2.y*50 + 200, 30, 30, 0, 0, 2 * Math.PI);
ctx.fill();
}
// Запускаем!
runSimulation(y0, f, render)Если подшаманить с числами, то можно получить симуляцию орбиты Луны!
Симуляция орбиты Луны, 1 пикс. = 2500 км. 1 сек. симуляции равна 1 дню на Земле. Пропорция Луны к Земле увеличена в 10 раз
Столкновения и ограничения
Приведённая математическая модель и в самом деле симулирует физический мир, но в некоторых случаях метод численного интегрирования, к сожалению, ломается.
Представьте симуляцию прыгающего на поверхности мячика.
Состояние симуляции можно описать так:

Где
 это высота мяча над поверхностью, а
это высота мяча над поверхностью, а  его скорость. Если отпустить мяч с высоты 0.8 метра, то получим:
его скорость. Если отпустить мяч с высоты 0.8 метра, то получим:
Если изобразить график
 , то получим нечто следующее:
, то получим нечто следующее: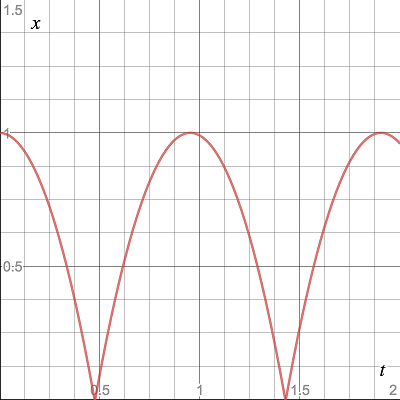
Во время падения мяча производная функции
вычисляется достаточно легко:
С ускорением свободного падения,
 .
.Но что произойдёт, когда мяч коснётся поверхности? То, что мяч достиг поверхности мы можем узнать по
 . Но при численном интегрировании, в один момент времени мяч может находиться над поверхностью, а уже в следующий под ней:
. Но при численном интегрировании, в один момент времени мяч может находиться над поверхностью, а уже в следующий под ней:  .
.Можно было бы решить эту задачу путём определения момента столкновения
 . Но даже если этот момент найти, как определить ускорение
. Но даже если этот момент найти, как определить ускорение  так, чтобы оно менялось в противоположную сторону.
так, чтобы оно менялось в противоположную сторону. Можно, конечно, определить столкновение в ограниченном промежутке времени и применить другую силу
 на этот отрезок времени
на этот отрезок времени  , но гораздо легче определить дискретную константу ограничивающую симуляцию.
, но гораздо легче определить дискретную константу ограничивающую симуляцию. А чтобы уменьшить величину проницания мячом поверхности, можно за один тик вычислять сразу несколько шагов симуляции. В совокупности с этим, код нашей симуляции изменится так:
function runSimulation<T extends Numeric<T>>(
y0: T,
f: (t: number, y: T) => T,
applyConstraints: (y: T) => T,
iterationsPerFrame: number,
render: (y: T) => void
) {
const frameTime = 1 / 60.0
const h = frameTime / iterationsPerFrame
function simulationStep(yi: T, ti: number) {
render(yi)
requestAnimationFrame(function () {
for (let i = 0; i < iterationsPerFrame; i++) {
yi = yi.plus(f(ti, yi).times(h))
yi = applyConstraints(yi)
ti = ti + h
}
simulationStep(yi, ti)
})
}
simulationStep(y0, 0.0)
}И теперь уже можно написать код нашего прыгающего мячика:
Код прыгающего мячика
const g = -9.8; // m / s^2
const r = 0.2; // m
class Ball implements Numeric<Ball> {
constructor(readonly x: number, readonly v: number) { }
plus(other: Ball) { return new Ball(this.x + other.x, this.v + other.v) }
times(scalar: number) { return new Ball(this.x * scalar, this.v * scalar) }
}
function f(t: number, y: Ball) {
const { x, v } = y
return new Ball(v, g)
}
function applyConstraints(y: Ball): Ball {
const { x, v } = y
if (x <= 0 && v < 0) {
return new Ball(x, -v)
}
return y
}
const y0 = new Ball(
/* x */ 0.8,
/* v */ 0
)
function render(y: Ball) {
ctx.clearRect(0, 0, 400, 400)
ctx.fillStyle = '#EB5757'
ctx.beginPath()
ctx.ellipse(200, 400 - ((y.x + r) * 300), r * 300, r * 300, 0, 0, 2 * Math.PI)
ctx.fill()
}
runSimulation(y0, f, applyConstraints, 30, render)
Внимание разработчикам!
Хоть у такой модели есть свои плюсы, она не всегда ведёт к производительным симуляциям. По мне, такой фреймворк полезен для представления поведения симуляции, даже если в ней происходит много чего лишнего.
Например, симуляция дождя в начале этой статьи [прим. В оригинальной статье, в начале вставлена красивая интерактивная симуляция дождя, рекомендую посмотреть воочию] не была создана с использованием, описанного в статье, шаблона. Это был эксперимент с использованием Entity–component–system. Исходники симуляции можно найти тут: симуляция дождя на GitHub.
До скорого!
Я нахожу пересечение математики, физики и программирования чем-то действительно впечатляющим. Создание работающей симуляции, её запуск и рендеринг это некий особенный вид чего-то из ничего.
На всё изложенное меня вдохновили материалы лекции SIGGRAPH, точно так же как и в симуляции жидкости. Если хотите найти более исчерпывающую информацию о вышеизложенном, то взгляните на материалы курса SIGGRAPH 2001 «Введение в физическое моделирование». Привожу ссылку на курс 1997 года, т.к. Pixar похоже удалила версию 2001.
Хочу поблагодарить Maggie Cai за чудесную иллюстрацию пары под зонтом и за терпение при кропотливом подборе цветов, в то время как я не могу отличить синее от серого.
А если вас интересует, то иллюстрации были созданы в Figma.
Only registered users can participate in poll. Log in, please.
Переводить ли статью «симуляция жидкости» (ссылка дана в заключении статьи)
97.11% Да168
2.89% Нет5
173 users voted. 22 users abstained.
