Comments 52
Офигенная штука.
Какую макс скорость развивает при управлении с джойстика?
Как происходит начало движения — бот делает «шаг» назад для наклона и потом начинает движение?
Какую макс скорость развивает при управлении с джойстика?
Как происходит начало движения — бот делает «шаг» назад для наклона и потом начинает движение?
Какую макс скорость развивает при управлении с джойстика?Сложно дать точную оценку, так как я не снимал показания с самого робота. Очень приблеженно 1-1.5 м/c.
Как происходит начало движения — бот делает «шаг» назад для наклона и потом начинает движение?Совершенно верно. Вначале необходимо сделать наклон в сторону движения.
Кафедра «Робототехнические системы» — это РК какой номер по старому?
Мегакруто. Жаль, нет видео где он ездит.
В видео есть небольшой фрагмент, как я управляю роботом с помощью джойстика.
youtu.be/_hd1qgXshoo?t=74
К сожалению это почти не заметно, и кажется, что робота придерживают рукой.
К сожалению это почти не заметно, и кажется, что робота придерживают рукой.
| шаробот одинаково легко передвигается во всех направлениях,
А в направлении колеса? Ведь тогда шар должен скользить поперек колеса,
а это же большое трение и износ. Да и в любом другом направлении,
в лучшем случае только одно колесо может катиться,
остальные должны проскальзывать, а это трение, износ, потери.
Или я что-то не понял?
И может ли такое устройство стоять неподвижно или
все время хаотично ездит, так что рядом с ним опасно находиться?
А в направлении колеса? Ведь тогда шар должен скользить поперек колеса,
а это же большое трение и износ. Да и в любом другом направлении,
в лучшем случае только одно колесо может катиться,
остальные должны проскальзывать, а это трение, износ, потери.
Или я что-то не понял?
И может ли такое устройство стоять неподвижно или
все время хаотично ездит, так что рядом с ним опасно находиться?
Там не обычное колесо, а омниколесо. У него по окружности колеса маленькие колёса с перпендикулярной осью вращения.
Чтобы шар катился, как вы говорите, поперек колеса, существуют омниколеса. В нем нет никакого проскальзывания поперек колеса, только трение качения.
Стоять полностью неподвижно такое «устройство» никогда не сможет, т.к. мы находимся не в сферическом вакууме. Данный шаробот сохраняет равновесие в окружности примерно 5 см при отсутствии внешних воздействующих факторов. Стоять рядом с ним точно не опасно. Если его толкнуть, то, конечно, он поедет.
Стоять полностью неподвижно такое «устройство» никогда не сможет, т.к. мы находимся не в сферическом вакууме. Данный шаробот сохраняет равновесие в окружности примерно 5 см при отсутствии внешних воздействующих факторов. Стоять рядом с ним точно не опасно. Если его толкнуть, то, конечно, он поедет.
Я думаю эта технология отлично подойдет для робо столов и стульев. Стулья такие можно и как транспорт использовать. А столы вместо официантов. Сделал заказ с телефона, и прикатил стол с едой.
вы сильно опоздали с вашей идеей :)
r-lib.ru/wp-content/uploads/2013/09/092513_1127_1.jpg
r-lib.ru/wp-content/uploads/2013/09/092513_1127_1.jpg
{kind=link}
ну тут немножечко другое.
{kind=link}
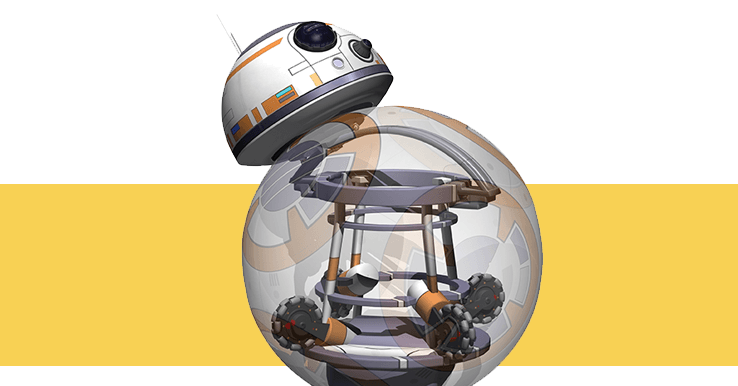
С BB-8 данный шаробот не имеет почти ничего общего. У BB-8 центр тяжести находится ниже геометрического центра, поэтому ему не надо стабилизировать себя, он как неваляшка.
«С BB-8 данный шаробот не имеет почти ничего общего.»
Ну представьте, что нижний шар меньше, а «голова» — выше
«У BB-8 центр тяжести находится ниже геометрического центра, поэтому ему не надо стабилизировать себя, он как неваляшка»
Ок, покатайте (не наклоняйте, а именно покатайте) неваляшку. «Голова» же подвижная
Ну представьте, что нижний шар меньше, а «голова» — выше
«У BB-8 центр тяжести находится ниже геометрического центра, поэтому ему не надо стабилизировать себя, он как неваляшка»
Ок, покатайте (не наклоняйте, а именно покатайте) неваляшку. «Голова» же подвижная
Мне кажется, что у BB-8 таки другая модель передвижения. У него не голова движет шаром, а наоборот, голова только старается удерживаться в верхней точке шара, шар самостоятельно движется в нужную сторону внутренними двигателями.
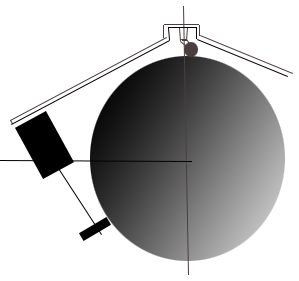
Примерно так выглядит механика bb-8:

Да ладно, все видели, что там вообще антигравитация.
А если серьезно, то ИМХО это непринципаиально. Когда вы свой аппарат толкаете, его голова пытается мячик догнать (прокрутить, чтобы на него залезть)?
А если серьезно, то ИМХО это непринципаиально. Когда вы свой аппарат толкаете, его голова пытается мячик догнать (прокрутить, чтобы на него залезть)?
Скорее наоборот, мячик пытается подстроиться под тело.
У вас такой хитрый мячик? По Вашему рисунку я уже готов поверить, что BB-8 пытается подстроится под «голову».
У меня складывается такое ощущение, что Вы пытаетесь мне объяснить, что автомобиль, едущий в гору на первой передаче и автомобиль, тормозящий двигателем на первой передаче, когда он спускается с нее — два принципиально разных устройства…
У меня складывается такое ощущение, что Вы пытаетесь мне объяснить, что автомобиль, едущий в гору на первой передаче и автомобиль, тормозящий двигателем на первой передаче, когда он спускается с нее — два принципиально разных устройства…
Голова у BB-8 не имеет никакого функционального назначения. Это обычный sphero, просто сверху на магните или еще на чем-то держится голова. И как-то странно говорить, что под чего подстраивается.
В итоге, такая идея конструкции сложна технически (чего стоят хитрые омни-колёса со скольжением в поперечной плоскости), но проста математически — двигаться можно тремя колёсами в любом направлении с помощью подбора тяги двух колёс из 3. (Похоже, именно поэтому и понадобились двигатели с управлением по току, что тоже удорожило.) Правда, есть и плюсы — беспроблемная ориентация столика, на котором можно расположить видеокамеру.
Но что, если построить модель движения для более примитивной конструкции, просто трёх жёстких резиновых колёс? Уворачиваться от падения и двигаться придётся более хитрым механизмом «взбирания на гору круговым движением» двух и подтормаживанием одного, самого верхнего из колёс. Заставлять двигаться шар тоже придётся не простым качением тягловых «нижне-передних» колёс «в гору», а движением по правому или левому склону шара, постоянно подбираясь к его вершине сбоку, дозированно тормозя верхним колесом. При этом верхний столик (и всё тело) неизбежно требовал бы вращения. И тогда, чтобы стабилизировать на нём камеру, придётся ставить верхний поворотный двигатель.
Наверняка, в обеих проектах такая идея прорабатывалась и даже уравнения движений, наверное, написаны (и модель в матлабе есть?). Скажите, (автор изделия,) что сложного возникает по пути реализации этой идеи (с упрощением механики)? Может быть, неустойчивость траектории? Может быть, всё равно нельзя отказаться от контроля тяги?
Но что, если построить модель движения для более примитивной конструкции, просто трёх жёстких резиновых колёс? Уворачиваться от падения и двигаться придётся более хитрым механизмом «взбирания на гору круговым движением» двух и подтормаживанием одного, самого верхнего из колёс. Заставлять двигаться шар тоже придётся не простым качением тягловых «нижне-передних» колёс «в гору», а движением по правому или левому склону шара, постоянно подбираясь к его вершине сбоку, дозированно тормозя верхним колесом. При этом верхний столик (и всё тело) неизбежно требовал бы вращения. И тогда, чтобы стабилизировать на нём камеру, придётся ставить верхний поворотный двигатель.
Наверняка, в обеих проектах такая идея прорабатывалась и даже уравнения движений, наверное, написаны (и модель в матлабе есть?). Скажите, (автор изделия,) что сложного возникает по пути реализации этой идеи (с упрощением механики)? Может быть, неустойчивость траектории? Может быть, всё равно нельзя отказаться от контроля тяги?
В итоге, такая идея конструкции сложна технически (чего стоят хитрые омни-колёса со скольжением в поперечной плоскости), но проста математически — двигаться можно тремя колёсами в любом направлении с помощью подбора тяги двух колёс из 3. (Похоже, именно поэтому и понадобились двигатели с управлением по току, что тоже удорожило.) Правда, есть и плюсы — беспроблемная ориентация столика, на котором можно расположить видеокамеру.На самом деле такая конструкция самая простая в исполнении, именно поэтому я и выбрал её. Без омниколес не обойтись в любом случае. В каком положении не ставь обычные колеса, будет возникать большое трение и проскальзывание, что практически невозможно учесть в мат. модели и, следовательно, в управлении.
Управление по току понадобилось не по этой причине. Когда речь идет о стабилизации таких систем, управление может быть только по моменту(по току). Можно пробовать управлять по скорости и подбирать коэффициенты эмпирически, но не думаю что из этого выйдет что-то.
Наверняка, в обеих проектах такая идея прорабатывалась и даже уравнения движений, наверное, написаны (и модель в матлабе есть?)Не очень понял про какие два проекта вы говорите. CMU и Rezero? Уравнения движения для них есть, но, как я писал выше, они составлены с учетом некоторых упрощений. Моделей в матлабе в открытом доступе у них нет.
Я ответил на ваши вопросы?
> Без омниколес не обойтись в любом случае. В каком положении не ставь обычные колеса, будет возникать большое трение и проскальзывание
---вот тут неверно — можно (и нужно) сделать такие допустимые движения, чтобы трения и проскальзывания не было. Как этого достичь — легко представить. Представьте для простоты, что вы на 3 колёсах, расположенных по линиям равностороннего треугольника, катаетесь по плоскости. Как повернуться, чтобы не было проскальзывания? Остановите одно колесо, двигаясь только двумя другими. Они поведут бота по кругу вокруг точки стоящего колеса. Точно так же можно представить и движения сразу тремя колёсами, если мёртвую точку (точку вращения бота) надо переместить. Строго говоря, трение будет, но только «вращательное», для всех 3 колёс, если их скорости подбирать. Но на то и процессор на боте, чтобы подбирать. И вся специфичность такого бота будет в том, что все его движения не должны быть скольжениями, а только поворотами вокруг некоторой требуемой точки.
> Можно пробовать управлять по скорости…
---Верно — и при отсутствии проскальзываний, которые в модели с омни-колёсами как раз допускаются, а с новой моделью можно избежать — скоростей или положений с датчиков поворотов колёс будет достаточно, а погрешности будут компенсироваться корректировками из других датчиков (гироскоп)
> про какие два проекта вы говорите
---ваш и Rezero (темой не занимался, прочитал только Вашу статью; да, спасибо, на вопросы ответили полностью). Ну, значит, как я понял, мат-моделей для обычных колёс для движений без проскальзываний нет. Значит, есть, что изобретать дальше: )
А дальше придумалась ещё одна простая конструкция, которая будет на той же модели без проскальзываний и при этом держать шарик — поставить 3 колеса на выдвинутых осях, чтобы прикасались к шару ниже его центра масс, а сверху шар зафиксировать 4-й пассивно крутящейся точкой
(К сожалению, не нашёл ни одной иллюстрации своего описания в https://www.google.ru/search?tbm=isch&sa=1&q=ball+balancing+robot — везде 3 колеса лишь сверху. Суть накидал в своём рисунке.)
---вот тут неверно — можно (и нужно) сделать такие допустимые движения, чтобы трения и проскальзывания не было. Как этого достичь — легко представить. Представьте для простоты, что вы на 3 колёсах, расположенных по линиям равностороннего треугольника, катаетесь по плоскости. Как повернуться, чтобы не было проскальзывания? Остановите одно колесо, двигаясь только двумя другими. Они поведут бота по кругу вокруг точки стоящего колеса. Точно так же можно представить и движения сразу тремя колёсами, если мёртвую точку (точку вращения бота) надо переместить. Строго говоря, трение будет, но только «вращательное», для всех 3 колёс, если их скорости подбирать. Но на то и процессор на боте, чтобы подбирать. И вся специфичность такого бота будет в том, что все его движения не должны быть скольжениями, а только поворотами вокруг некоторой требуемой точки.
> Можно пробовать управлять по скорости…
---Верно — и при отсутствии проскальзываний, которые в модели с омни-колёсами как раз допускаются, а с новой моделью можно избежать — скоростей или положений с датчиков поворотов колёс будет достаточно, а погрешности будут компенсироваться корректировками из других датчиков (гироскоп)
> про какие два проекта вы говорите
---ваш и Rezero (темой не занимался, прочитал только Вашу статью; да, спасибо, на вопросы ответили полностью). Ну, значит, как я понял, мат-моделей для обычных колёс для движений без проскальзываний нет. Значит, есть, что изобретать дальше: )
А дальше придумалась ещё одна простая конструкция, которая будет на той же модели без проскальзываний и при этом держать шарик — поставить 3 колеса на выдвинутых осях, чтобы прикасались к шару ниже его центра масс, а сверху шар зафиксировать 4-й пассивно крутящейся точкой
(К сожалению, не нашёл ни одной иллюстрации своего описания в https://www.google.ru/search?tbm=isch&sa=1&q=ball+balancing+robot — везде 3 колеса лишь сверху. Суть накидал в своём рисунке.)


Весьма достойная работа. Я бы сказал, слегка избыточная для диплома :) Спасибо большое за рассказ.
Редко для диплома делают что-то интересное. Респект автору!
Это прекрасно, побольше бы таких дипломов на хабре!
Вы уже решили куда планируете пойти работать и на какое ежемесячное вознаграждение рассчитываете?
Странный вопрос. Я начал работать программистом со второго курса. На ежемесячное вознаграждение не жалуюсь, пока :).
Я не про деньги как таковые, просто интересно узнать неужели в стране которая даже своих станков ЧПУ не производит, где-то требуется разработка роботов. Где делается продукция которые потенциально может продаваться пусть маленькими но партиями в том числе зарубежным покупателям, и быть при этом не только игрушкой от околовоенного заказа или хобби?
Респект автору!
Самостоятельно сделать механику, конструкцию, математику, софт и даже немного электроники — это я понимаю full stack.
Самостоятельно сделать механику, конструкцию, математику, софт и даже немного электроники — это я понимаю full stack.
Новый оборонный заказ :)

Не много дипломов делают в железе!
А где сейчас этот робот? Его руками можно пощупать?
А где сейчас этот робот? Его руками можно пощупать?
Не могли бы вы дать свою почту?
Понятно, что заниматься стабилизацией колонны на шаре занятнее и с точки зрения дипломного проекта более науко и трудоёмко… но вот с чисто практической точки зрения — вариант bb8 с механикой внутри шара рассмотрели, но можно же её вынести за пределы шара, допустим на кольцо ниже центра масс, и задача балансирования шаткой колонной отпадёт сама собой. Думаю для решения практических задач шароботов такая конструкция оптимальнее.

Задача стабилизации не отпадет, т.к. ваше кольцо будет падать на бок.
Если шар будет стоять на месте — да, даже идеально развесованное кольцо упадёт на бок. Но уверен, в движении кольцо на подвесах-колёсах будет стабилизировать проще, за счёт инерции, чем башню на шаре. Это как с велосипедом — он в статичном положении тоже рухнет сразу.
Ещё один момент — положение центра масс. Чем он ниже, тем стабильнее любая движущаяся по земле система при прочих равных.
Это неверно. Как я и писал в статье, что чем выше центр тяжести у обратного маятника, тем легче его стабилизировать. А как ваше кольцо снаружи не располагай, все равно получается трехмерный обратный маятник.
Для примера возьмите карандаш и попробуйте стабилизировать его на ладони в вертикальном положении. Затем возьмите стержень длиннее. Разницу сразу почувствуете.
Для примера возьмите карандаш и попробуйте стабилизировать его на ладони в вертикальном положении. Затем возьмите стержень длиннее. Разницу сразу почувствуете.
А если сделать внутри кольца с начинкой-моторами ещё одно, вращающееся (точнее наверное два, в разные стороны, чтобы момент погасить), то этот гироскоп не даст системе упасть и стоя на месте… получится управляемая юла с шаром в качестве точки опоры.
Sign up to leave a comment.
История одного диплома или как сделать шаробота