Comments 96

А дело, на самом деле, было тут maps.yandex.ru/-/CVrfy8JE

А на Парнасе Вы случаем во дворах не летаете, а то с окна иногда наблюдаю?
На Парнасе не летаю… А там есть, где развернуться без риска для окружающих?

Но на вот этой моей самописной прошивке — на видео в конце видно, что он довольно шустр по YAW :-)
Еще, когда управлял Y6 — было удобнее определять, где у него перед т.к. всего три варианта.
Практически вашим квадрокоптером невозможно будет управлять: пилоту придется рулить непосредственно каждым мотором отдельно. Представьте: пепелац висит к вам боком, его начинает заваливать на один борт и крутить по углу рыскания, например. Быстро ли вы сообразите, какими моторами надо работать больше, а какими меньше? Наверное научиться можно, но скольких квадрокоптеров это будет стоить?
Даже супер специалисты руления квадрокоптерами, которые крутят ими фигуры высшего пилотажа, чаще всего используют какую-никакую стабилизацию углов с датчиками и контроллером.
На сколько мне известно, у БК моторов в среднем выше КПД, они надежнее, выше обороты из-за отсутствия щеток, а, кроме того, даже открытые БК моторы не боятся влаги в разумных пределах.
(кликабельно)
, да чтобы заменить погнутый ротор после очередного падения.
Могу сказать одно: свой регулятор — дело тонкое и сложное. Уже сколько времени производят БК моторы и регули, а все еще не решены некоторые проблемы. И даже на популярных прошивках происходят отказы в определенных комбинациях мотор/регуль, особенно с плоскими многополюсниками.
потребляемый ток, процент скорости вращения, количество вольт, тип и размер пропеллера, создаваемое усилие. Такие таблицы есть для многих моторов. Если все-таки ее нет, остается полагаться на опыт предшественников (отзывы на самом сайте, на форумах, иногда на Ютубе можно внезапно найти коптер с выбранными моторами).
Коптер из статьи и его братья отлично себя чувствуют на моторах за 10$, но тяжести больше 1кг им не под силу.
Все «бытовые» движки, которые вы можете найти — для авиамоделизма — мусор. Кроме движков привода диска из DVD-ROMов. Но они по сути те же бесколлекторники.
А коллекторные движки применяют на микрокоптерах, типа такого например. Они применяются, где нет возможности городить 4 сложных регуля, и цена первична — коллекторные движки значительно дешевле.
И забудьте про сборку коптера из хлама. Оно не полетит, сил и нервов истратится более чем достаточно.
Бесколлекторники значительно лучшего качества можно просто купить. Стоят они недорого, начинаются чуть не с 8 долларов. И это будет 100% лучше, чем двигло из двд-привода.
Можно попробовать из HDD — в некоторых тоже трехвыводные стоят, крутятся от модельных регуляторов(видел что из них помпы для водяного охлаждения ПК делают). Они помощнее должны быть чем из CD/DVD.
I=0.005
D=0.1
, а у вас какие, limon_spb?
На самом деле, на разных компьютерах могут получаться немного разные значения: таймер физики установлен на 5мс. Но не все браузеры и компьютеры будут так часто считать.
P=0.3
I=0.05
D=0.1

для коэфф. усиления, что 0.1, что 0.2, что 0.3 тут не сильно заметно…
Ну а коэфф. интегрирования в 10-100 раз меньше Kp — думаю нормально… не вижу разницы сильной. Но я со своей колокольни…
И у меня примерно на таких котельная работает ))))
вот тут писал на примере multiwii-го регуля про некоторые «рецепты» forum.rcdesign.ru/f123/thread224458-41.html#post4063913
with application to autonomous flying»
Там как раз есть исследование и сравнение разных регуляторов, применимых к мультикоптерам и вывод уравнений для обратного хода интегратора.
tom.pycke.be/mav/69/accelerometer-to-attitude
на английском, правда. Можете взяться за перевод — будет очень востребованный материал :-) на самом деле :-)
Думаете будет востребованн? Ведь даже на хабрахабре есть штук 5, если не больше статей по фильтру Калмана. Не стану утверждать что полностью доволен ими, но это субъективное мнение. Стоит ли заново поднимать тему…
А что касается статьи — то, пожалуй, может действительно возьмусь. В конце концов, попытаться кому-то что-то объяснить — это неплохой способ и самому в этом разобраться! :)
здесь можно найти работу этого чувака — получение углов и фильтрация, есть даже примеры кода для IMU и AHRS
Когда с текущими проектами подразберусь начну свой коптер делать. Планирую полетный контроллер на FPGA реализовать. Цель сборки ученическая. Имхо использовать готовые прошивки это как готовый коптер купить. Если нужен чисто коптер на полетать то годный способ, если кайф от правильного применения рук и мозгов то не очень.
Жду продолжения.
По поводу сборки — тут вы не совсем правы: заказать детали из китайских магазинов и собрать из них коптер — дело хлопотное и требующее не слишком кривых рук и немного инженерной мысли. Не могу не поддержать ваше желание самому писать прошивку, но советую сначала полетать на готовых: поверьте, трудностей будет прилично. Да, свой тестовый коптер я собрал за пол дня, но он был у меня далеко не первый, а первый я собирал почти неделю и 4 выходных дня: огромная куча вопросов, голова опухала, в мозгу все мешалось в кучу :-)
По поводу сборки из заказанных комплектующих вы правы, дело хлопотное, но можно экономить время покупая набор рама\двиги\пропеллеры\эски.
Еще причина почему не летал — никак не могу выбрать зарядку, которая бы понравилась.
По поводу управления еще вопрос — вы пробовали игровым джойстиком управлять? Это разве не удобнее?
автодизарм, если газ был на нуле в течении 2-3 секунд.На мультикоптере вполне понятное поведение, на вертолете же достаточно холда (который оставляет управление шагом и выводит газ в 0 на электрике и на холостые на ДВС).
Холд выносится на отдельный переключатель, это позволяет использовать его как самостоятельный режим (для авторотации, штатной посадки, проверки механики). На передатчике холд обычно маппится так, чтобы его включить было проще, чем выключить. Это, ко всему прочему, помогает спасти больше механики при падении (если успеть щелкнуть холд, конечно).
С точки зрения безопасности — сначала включается передатчик, проверяется режим (выставляется normal, включается hold) и только потом — борт (плюс многие современные приемники уходят в failsafe до появления сигнала). Проверка режима естественна, т. к. взлетать на idle-1 (обычно минимум газа около 80-90% в районе 1-3°) — опасно.
Ну а я через неделю-другую продолжу рассказ...
и потом не поправил. А на самом деле получилось, что работа над первой частью закончилась через ТРИ недели после начала (почти каждый день по несколько часов) :-) Она выжала у меня просто все соки. Конечно, хоть тот коптер уже давно разобран, но видео есть, программа есть: я должен побороть себя и написать вторую часть.
В любом случае спасибо за проделанную работу. Надеюсь к вам вернется «вдохновение».
Может кто в курсе этого вопроса? Может быть сделать переходник с щёточного мотора, на сигнал управления платой бесщёточного?
И не ясно можно ли при этом использовать старый пульт.
С большой вероятностью — нет. Если есть фото плат управления крупным планом, можно погадать на них поконкретнее.
Но наиболее вероятно, что приёмник интегрирован с системой управления и с него можно взять его нелинейное управление напряжением и преобразовать в 4 pwm сигнала. Плюс рядом с этой крупной платой вам надо будет расположить: 4 ESC, ваш преобразователь на 4 канала, распределитель питания для всего этого барахла. И всё относительно далеко от антенны (качество приёмника и передатчика в пульте, скорее всего, не блещет по сравнению с нормальными spektrum/futaba).
Проще выкинуть оттуда всё барахло и использовать только каркас.
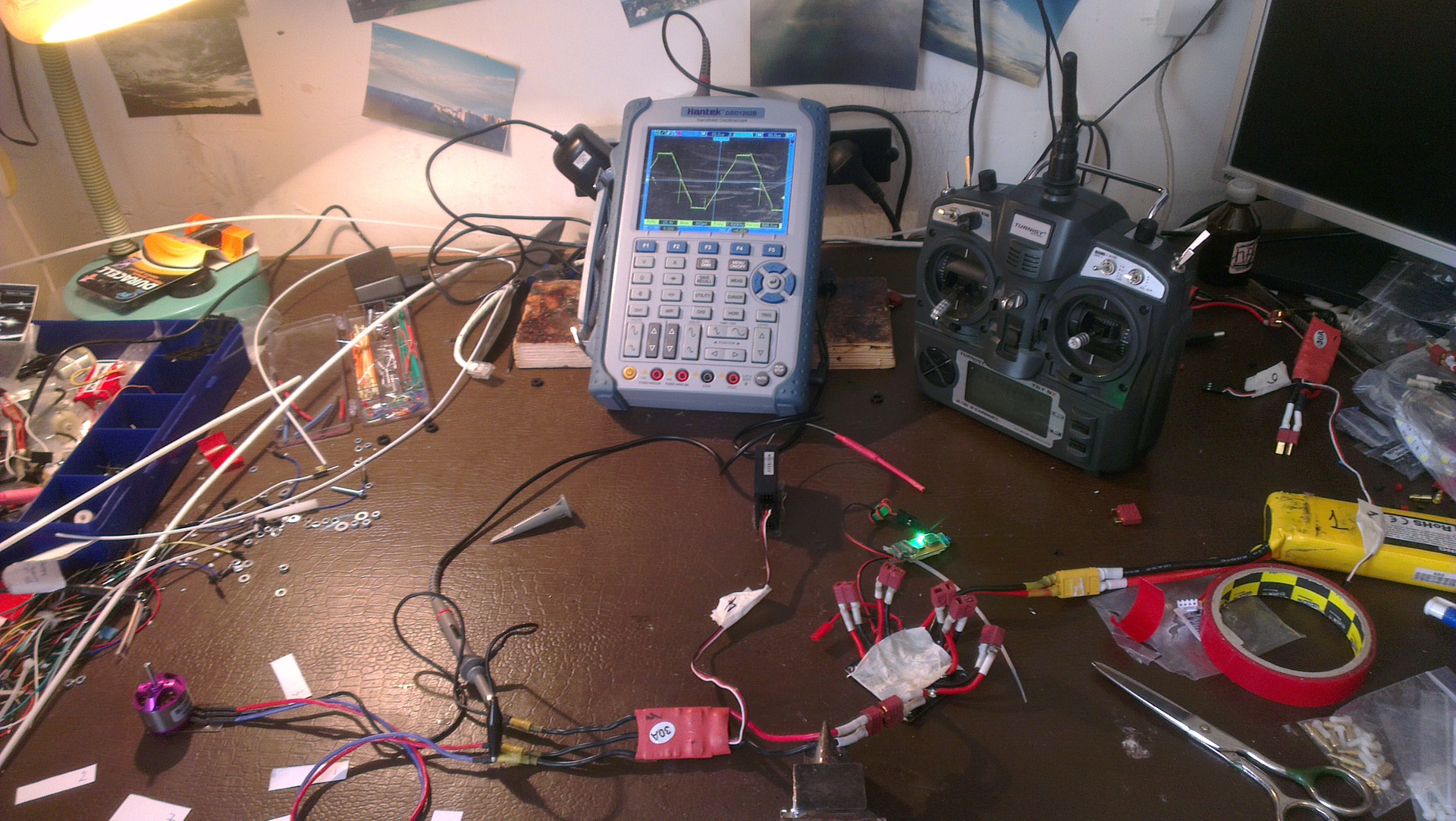
Начал разбираться с квадролётом. Сделал фотки и скрины сигналов с базы транзистора одного из моторов.
Приёмник.




Микросхемы HUBSAN HBS002 и INVENSENSE MPU-6050.
Передатчик.




Микросхема NUVOTON N79E814AS20.
Скрины осциллограмм. Потроха лежат на столе без винтов, покачивал плату и сигнал менялся.

Средний.

Максимум.

Теперь думаю как преобразовывать сигнал. Скорее всего делать на микроконтроллере. Интересно, какое нужно быстродействие?..
Осциллограммы с выхода на движки? 30 kHz, в принципе, немного. Один из вариантов — rc-фильтр и ацп со стороны контроллера, дальше тривиальная математика и выход на шим для esc. Я бы для такой задачи выбирал контроллер с аппаратным шимом. Например, из младших stm32.
Тайминги для esc не помню, но там частоты были не очень высокие. Или вы хотите делать на ардуине?
У меня лежит несколько бесхозных ATtiny85, думал на них. И не хотел с аналоговой частью делать. Мысль была мерить скважность (длительность импульсов) на выходе платы. Ну и генерировать импульсы для ESC.
Кстати, хотел выбрать недорогие моторы с электроникой, а там такой зоопарк… Может подскажете небольшие и недорогие моторы для этой цели?
У вас двойной период измерен, не заметил сходу. То уж подумал, что разучился считать в уме =)
Судя по осциллограммам сигнал достаточно чистый, но будет ли он таким же при работе движков — неизвестно. Минимальный фильтр всё равно имеет смысл, даже если вы измеряете скважность с цифрового входа.
По конкретным моделям двигателей не подскажу, у меня модельный вертолёт, там ситуация иная. Из общих соображений вам стоит брать inrunner, если нет хорошей гарантии, что будет открытое пространство вокруг двигателя.
Дальше посчитать нужные максимальные обороты движка исходя из необходимых оборотов на роторах и редуктора. Потом поделить получившиеся обороты в krpmна напряжение аккумулятора под нагрузкой ближе к разрядке получить значение в kv (krpm/v). По этому значению и габаритам подбирать.
Насчёт необходимой периферии на тиньке не скажу, с телефона сейчас.
Программируем квадрокоптер на Arduino (часть 1)