В качестве введения
В настоящее время Байесовские методы получили достаточно широкое распространение и активно используются в самых различных областях знаний. Однако, к сожалению, не так много людей имеют представление о том, что же это такое и зачем это нужно. Одной из причин является отсутствие большого количества литературы на русском языке. Поэтому здесь попытаюсь изложить их принципы настолько просто, насколько смогу, начав с самых азов (прошу прощения, если кому-то это покажется слишком простым).
В дальнейшем я бы хотел перейти к непосредственно Байесовскому анализу и рассказать об обработке реальных данных и о, на мой взгляд, отличной альтернативе языку R (о нем немного писалось тут) — Python с модулем pymc. Лично мне Python кажется гораздо более понятным и логичным, чем R с пакетами JAGS и BUGS, к тому же Python дает гораздо большую свободу и гибкость (хотя в Python есть и свои трудности, но они преодолимы, да и в простом анализе встречаются нечасто).
Немного истории
В качестве краткой исторической справки скажу, что формула Байеса была опубликована аж в 1763 году спустя 2 года после смерти ее автора, Томаса Байеса. Однако, методы, использующие ее, получили действительно широкое распространение только к концу ХХ века. Это объясняется тем, что расчеты требуют определенных вычислительных затрат, и они стали возможны только с развитием информационных технологий.
О вероятности и теореме Байеса
Формула Байеса и все последующее изложение требует понимания вероятности. Подробнее о вероятности можно почитать на Википедии.
На практике вероятность наступления события есть частота наступления этого события, то есть отношение количества наблюдений события к общему количеству наблюдений при большом (теоретически бесконечном) общем количестве наблюдений.
Рассмотрим следующий эксперимент: мы называем любое число из отрезка [0, 1] и смотрим за тем, что это число будет между, например, 0.1 и 0.4. Как нетрудно догадаться, вероятность этого события будет равна отношению длины отрезка [0.1, 0.4] к общей длине отрезка [0, 1] (другими словами, отношение «количества» возможных равновероятных значений к общему «количеству» значений), то есть (0.4 — 0.1) / (1 — 0) = 0.3, то есть вероятность попадания в отрезок [0.1, 0.4] равна 30%.
Теперь посмотрим на квадрат [0, 1] x [0, 1].

Допустим, мы должны называть пары чисел (x, y), каждое из которых больше нуля и меньше единицы. Вероятность того, что x (первое число) будет в пределах отрезка [0.1, 0.4] (показан на первом рисунке как синяя область, на данный момент для нас второе число y не важно), равна отношению площади синей области к площади всего квадрата, то есть (0.4 — 0.1) * (1 — 0) / (1 * 1) = 0.3, то есть 30%. Таким образом можно записать, что вероятность того, что x принадлежит отрезку [0.1, 0.4] равна p(0.1 <= x <= 0.4) = 0.3 или для краткости p(X) = 0.3.
Если мы теперь посмотрим на y, то, аналогично, вероятность того, что y находится внутри отрезка [0.5, 0.7] равна отношению площади зеленой области к площади всего квадрата p(0.5 <= y <= 0.7) = 0.2, или для краткости p(Y) = 0.2.
Теперь посмотрим, что можно узнать о значениях одновременно x и y.
Если мы хотим знать, какова вероятность того, что одновременно x и y находятся в соответствующих заданных отрезках, то нам нужно посчитать отношение темной площади (пересечения зеленой и синей областей) к площади всего квадрата: p(X, Y) = (0.4 — 0.1) * (0.7 — 0.5) / (1 * 1) = 0.06.
А теперь допустим мы хотим знать какова вероятность того, что y находится в интервале [0.5, 0.7], если x уже находится в интервале [0.1, 0.4]. То есть фактически у нас есть фильтр и когда мы называем пары (x, y), то мы сразу отбрасывает те пары, которые не удовлетворяют условию нахождения x в заданном интервале, а потом из отфильтрованных пар мы считаем те, для которых y удовлетворяет нашему условию и считаем вероятность как отношение количества пар, для которых y лежит в вышеупомянутом отрезке к общему количеству отфильтрованных пар (то есть для которых x лежит в отрезке [0.1, 0.4]). Мы можем записать эту вероятность как p(Y|X). Очевидно, что эта вероятность равна отношению площади темной области (пересечение зеленой и синей областей) к площади синей области. Площадь темной области равна (0.4 — 0.1) * (0.7 — 0.5) = 0.06, а площадь синей (0.4 — 0.1) * (1 — 0) = 0.3, тогда их отношение равно 0.06 / 0.3 = 0.2. Другими словами, вероятность нахождения y на отрезке [0.5, 0.7] при том, что x уже принадлежит отрезку [0.1, 0.4] равна p(Y|X) = 0.2.
Можно заметить, что с учетом всего вышесказанного и всех приведенных выше обозначений, мы можем написать следующее выражение
p(Y|X) = p(X, Y) / p(X)
Кратко воспроизведем всю предыдущую логику теперь по отношению к p(X|Y): мы называем пары (x, y) и фильтруем те, для которых y лежит между 0.5 и 0.7, тогда вероятность того, что x находится в отрезке [0.1, 0.4] при условии, что y принадлежит отрезку [0.5, 0.7] равна отношению площади темной области к площади зеленой:
p(X|Y) = p(X, Y) / p(Y)
В двух приведенных выше формулах мы видим, что член p(X, Y) одинаков, и мы можем его исключить:

Мы можем переписать последнее равенство как
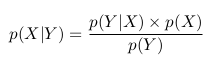
Это и есть теорема Байеса.
Интересно еще заметить, что p(Y) это фактически p(X,Y) при всех значениях X. То есть, если мы возьмем темную область и растянем ее так, что она будет покрывать все значения X, она будет в точности повторять зеленую область, а значит, она будет равна p(Y). На языке математики это будет означать следующее:

Тогда мы можем переписать формулу Байеса в следующем виде:

Применение теоремы Байеса
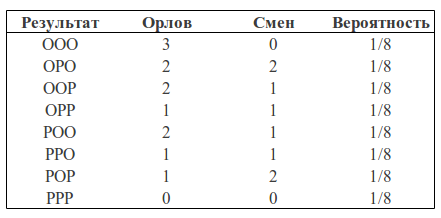
Давайте рассмотрим следующий пример. Возьмем монетку и подкинем ее 3 раза. С одинаковой вероятностью мы можем получить следующие результаты (О — орел, Р — решка): ООО, ООР, ОРО, ОРР, РОО, РОР, РРО, РРР.
Мы можем посчитать какое количество орлов выпало в каждом случае и сколько при этом было смен орел-решка, решка-орел:
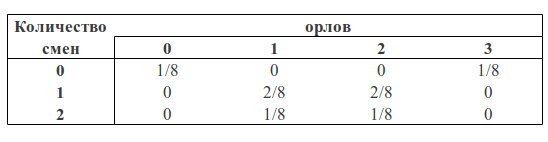
Мы можем рассматривать количество орлов и количество изменений как две случайные величины. Тогда таблица вероятностей будет иметь следуюший вид:
Теперь мы можем увидеть формулу Байеса в действии.
Но прежде проведем аналогию с квадратом, который мы рассматривали ранее.
Можно заметить, что p(1O) есть сумма третьего столбца («синяя область» квадрата) и равна сумме всех значений ячеек в этом столбце: p(1O) = 2/8 + 1/8 = 3/8
p(1С) есть сумма третьей строки («зеленая область» квадрата) и, аналогично, равна сумме всех значений ячеек в этой строке p(1С) = 2/8 + 2/8 = 4/8
Вероятность того, что мы получили одного орла и одну смену равна пересечению этих областей (то есть значение в клетке пересечения третьего столбца и третьей строки) p(1С, 1О) = 2/8
Тогда, следуя формулам описанным выше, мы можем посчитать вероятность получить одну смену, если мы получили одного орла в трех бросках:
p(1С|1О) = p(1С, 1О) / p(1О) = (2/8) / (3/8) = 2/3
или вероятность получить одного орла, если мы получили одну смену:
p(1О|1С) = p(1С, 1О) / p(1С) = (2/8) / (4/8) = 1/2
Если мы посчитаем вероятность получить одну смену при наличии одного орла p(1О|1С) через формулу Байеса, то получим:
p(1О|1С) = p(1С|1О) * p(1О) / p(1С) = (2/3) * (3/8) / (4/8) = 1/2
Что мы и получили выше.
Но какое практическое значение имеет приведенный выше пример?
Дело в том, что, когда мы анализируем реальные данные, обычно нас интересует какой-то параметр этих данных (например, среднее, дисперсия и пр.). Тогда мы можем провести следующую аналогию с вышеприведенной таблицей вероятностей: пусть строки будут нашими экспериментальными данными (обозначим их Data), а столбцы — возможными значениями интересующего нас параметра этих данных (обозначим его
 ). Тогда нас интересует вероятность получить определенное значение параметра на основе имеющихся данных
). Тогда нас интересует вероятность получить определенное значение параметра на основе имеющихся данных  .
.Мы можем применить формулу Баейса и записать следующее:

А вспомнив формулу с интегралом, можно записать следующее:

То есть фактически как результат нашего анализа мы имеет вероятность как функцию параметра. Теперь мы можем, например, максимизировать эту функцию и найти наиболее вероятное значение параметра, посчитать дисперсию и среднее значение параметра, посчитать границы отрезка, внутри которого интересующий нас параметр лежит с вероятностью 95% и пр.
Вероятность
называют апостериорной вероятностью. И для того, чтобы посчитать ее нам надо иметь — функцию правдоподобия и
— функцию правдоподобия и  — априорную вероятность.
— априорную вероятность.Функция правдоподобия определяется нашей моделью. То есть мы создаем модель сбора данных, которая зависит от интересующего нас параметра. К примеру, мы хотим интерполировать данные с помощью прямой y = a * x + b (таким образом мы предполагаем, что все данные имеют линейную зависимость с наложенным на нее гауссовым шумом с известной дисперсией). Тогда a и b — это наши параметры, и мы хотим узнать их наиболее вероятные значения, а функция правдоподобия — гаусс со средним, заданным уравнением прямой, и данной дисперсией.
Априорная вероятность включает в себя информацию, которую мы знаем до проведения анализа. Например, мы точно знаем, что прямая должна иметь положительный наклон, или, что значение в точке пересечения с осью x должно быть положительным, — все это и не только мы можем инкорпорировать в наш анализ.
Как можно заметить, знаменатель дроби является интегралом (или в случае, когда параметры могут принимать только определенные дискретные значения, суммой) числителя по всем возможным значениям параметра. Практически это означает, что знаменатель является константой и служит для того, что нормализировать апостериорную вероятность (то есть, чтобы интеграл апостериорной вероятности был равен единице).
На этом я бы хотел закончить свой пост (продолжение тут). Буду рад вашим комментариям.
