Comments 46
Спасибо за статью, я сейчас как раз интересуюсь темой — неделю назад собрал себе quad-x на контроллере HK Multicopter V3. Нe очень просто одновременно настраивать свой первый коптер и учиться на нем жe летать — до этого опыта с авиамоделизмом у меня нe было… но летает. Наверное в будущем прикуплю себе платку Multiwii — множество сенсоров очень интересно, на контроллере HK распаяны толькo гироскопы и нет возможности расширения.
Что используете для фотосьемки?
Отдельный пульт — для фотографа?
По поводу аэросъемок — те проф. решения, что я видел (в москве есть несколько «контор», занимающихся этим), фотографируют как я понял на автомате. Т.е. включают фотоаппарат, ставят постоянную сьемку и запускают коптер.
Возникла мысль, если многие фотоаппараты имеют ИК, почему бы с того же ардуино посредством подключенного к ней ИК не управлять сьемкой фотоаппарата?
Проблему фокусировки, конечно, трудно решить.
Может я чего-то не знаю, есть какие то решения — расскажите.
Отдельный пульт — для фотографа?
По поводу аэросъемок — те проф. решения, что я видел (в москве есть несколько «контор», занимающихся этим), фотографируют как я понял на автомате. Т.е. включают фотоаппарат, ставят постоянную сьемку и запускают коптер.
Возникла мысль, если многие фотоаппараты имеют ИК, почему бы с того же ардуино посредством подключенного к ней ИК не управлять сьемкой фотоаппарата?
Проблему фокусировки, конечно, трудно решить.
Может я чего-то не знаю, есть какие то решения — расскажите.
Я профессионально этим заниматься не собираюсь — или слишком большие вложения или слишком не качественный результат, особенно для видео съемки.
Большинство фотоаппаратов (не на мыльницы же снимают) имеют вход для управления (в крайнем случае пальцы фотографа легко заменяются моторчиками и серваки), а так же видео выход для live view. Т.е. достаточно оператору дать отдельный пульт для управления подвесом камеры и самой камерой, а так же монитор с выводом картинки с фотоаппарата. С видео съемкой еще проще — там 1 раз нажал и оно снимает. Самый просто и распространенный вариант — это Sony NEX5 (дешево) и Panasonic GH2 (качественная картинка, особенно с кастомной прошивкой).
При схемки с воздуха фокусировка почти всегда в бесконечность.
Большинство фотоаппаратов (не на мыльницы же снимают) имеют вход для управления (в крайнем случае пальцы фотографа легко заменяются моторчиками и серваки), а так же видео выход для live view. Т.е. достаточно оператору дать отдельный пульт для управления подвесом камеры и самой камерой, а так же монитор с выводом картинки с фотоаппарата. С видео съемкой еще проще — там 1 раз нажал и оно снимает. Самый просто и распространенный вариант — это Sony NEX5 (дешево) и Panasonic GH2 (качественная картинка, особенно с кастомной прошивкой).
При схемки с воздуха фокусировка почти всегда в бесконечность.
Пошарь в сторону CHDK — пашет для Кэнонов, правда, но на безрыбье…
Спасибо за статью.
Чем стабилизировалось второе видео?
Чем стабилизировалось второе видео?
Извиняюсь за наивный вопрос (сам я никогда коптерами не занимался), но в чем основная проблема удержания аппарата на месте? Неточные показания датчиков или погрешности/медлительность при управлении двигателями?
Ветер, не точность датчиков, кривая рама и пропеллеры, не идеальные моторы, вибрация, неверно откалиброванные регуляторы скорости, не точность расчетов внутри самого контроллера, т.е. очень много факторов, но в реальности это незначительный дрейф, а в безветренную погоду можно даже на дешевых датчиках зависнуть в точке на некоторое время.
Проблема ровно одна: нет возможности получить свои точные координаты.
вот какой вопрос. уже неделю борюсь по вечерам с мультивием, коптер взлетает максимум сантиметров на 10-50 и висит так даже на полном газу. Батарея почти полная, регуляторы калибровл напрямую от передатчика. При этом на куке коптер резво рвался вверх с приличным ускорением, тоестт запас тяги тоже очень приличный. Не подскажите куда смотреть? Плата crius se full
А в GUI как себя газ ведет? И как ведут сигналы на моторы?
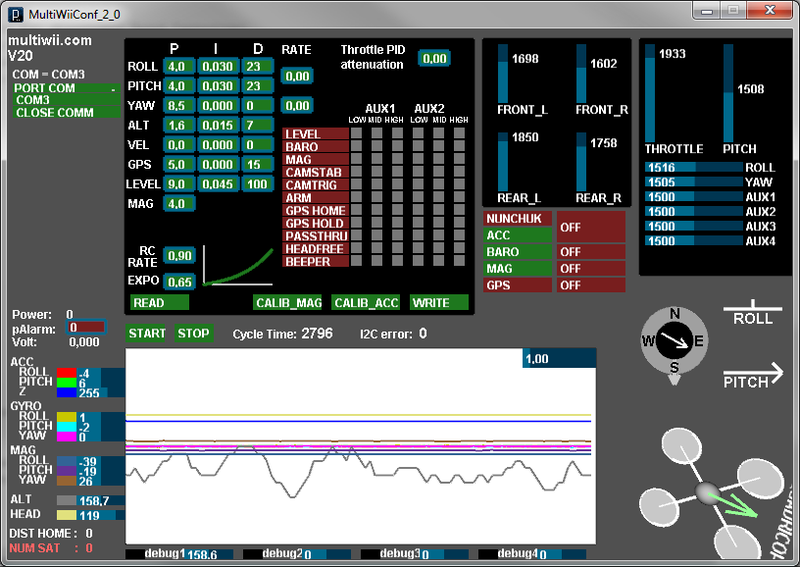
Да в целом как-то странно. Кстати при взлете коптер ощутимо заваливается на бок. Вот скрин гуя. Коптер на полном газу стоит без пропеллеров на полу.
http://habrastorage.org/storage2/cdf/16c/d5b/cdf16cd5b8e2fe3a1b4cf64827d740e9.png
http://habrastorage.org/storage2/cdf/16c/d5b/cdf16cd5b8e2fe3a1b4cf64827d740e9.png
{kind=link}
Заваливается при взлете у многих, а у вас еще и ROLL не в центре. Судя по гую должен нормально был взлетать, попробуйте на аппе увеличить расходы (если это возможно) и откалироваботь регули заново, а еще лучше перепрошить их кастомной прошивкой, я свои HK blueseries перешил — летать стал в разы лучше.
Без котов уже не интересно.
Гироскоп — для определения низа. Акселерометр — для определения ускорений!
Аксель нужен для стабилизации полёта не потому, что «знает где низ», а потому, что им можно оперативно определять «рывки» аппарата из-за ветра и т.п. и вводить корректировку!
Аксель нужен для стабилизации полёта не потому, что «знает где низ», а потому, что им можно оперативно определять «рывки» аппарата из-за ветра и т.п. и вводить корректировку!
Эх… если бы было всё так как вы описываете, почитайте про MEMS датчики и про то, что они измеряют на самом деле.
Лично возился ещё до Мультивия с ВииМотом: там именно акселерометр стоит.
И фигня в том, что определить направление «на землю» им можно только в состоянии ПОЛНОГО покоя, т.к. любая шевелюшка даёт ускорение по одной из осей!
Причём если в состоянии покоя этот вектор смотрит «в пол» с модулем в 9.8 (реально Виевский контроллер выдаёт то-ли 1, то-ли 2 — не помню точно), то при движении начинаются «фокусы»:
Скажем ты РЕЗКО дёргаешь контроллер вверх — значение доходит до пары g.
А теперь — резко ВНИЗ: значение чудесным образом падает до нуля…
И т.д. и т.п.
Когда разрабатывали ВииМот — поставили акселерометр и думали, что типа круто, взял как меч и перс на экране тебя копирует!
Щаззз! В лучшем случае — определяет момент резкого удара или наклоны, если это какой-нить МариоКарт!
WMP, собственно, добавлением гироскопа добавил именно определение относительного положения пульта! Фиговое, но…
Летать без акселерометра — можно.
А вот без гироскопа — это полный Пэ!
Матёрые моделисты считают аксель «понтами», которые в лучшем случае для стабилизации камеры и нужны-то…
И фигня в том, что определить направление «на землю» им можно только в состоянии ПОЛНОГО покоя, т.к. любая шевелюшка даёт ускорение по одной из осей!
Причём если в состоянии покоя этот вектор смотрит «в пол» с модулем в 9.8 (реально Виевский контроллер выдаёт то-ли 1, то-ли 2 — не помню точно), то при движении начинаются «фокусы»:
Скажем ты РЕЗКО дёргаешь контроллер вверх — значение доходит до пары g.
А теперь — резко ВНИЗ: значение чудесным образом падает до нуля…
И т.д. и т.п.
Когда разрабатывали ВииМот — поставили акселерометр и думали, что типа круто, взял как меч и перс на экране тебя копирует!
Щаззз! В лучшем случае — определяет момент резкого удара или наклоны, если это какой-нить МариоКарт!
WMP, собственно, добавлением гироскопа добавил именно определение относительного положения пульта! Фиговое, но…
Летать без акселерометра — можно.
А вот без гироскопа — это полный Пэ!
Матёрые моделисты считают аксель «понтами», которые в лучшем случае для стабилизации камеры и нужны-то…
И?
Не совсем понял что этим сообщением вы хотели сказать. Я нигде и не писал что можно летать на одном акселе без гиры и даже написал что можно летать только с одной гирой. Матерые моделисты обычно маньяки, зачем летать и мучиться, постоянно корректируя ЛА, если можно просто летать?
Не совсем понял что этим сообщением вы хотели сказать. Я нигде и не писал что можно летать на одном акселе без гиры и даже написал что можно летать только с одной гирой. Матерые моделисты обычно маньяки, зачем летать и мучиться, постоянно корректируя ЛА, если можно просто летать?
То, что вы называете гироскопом, на самом деле ДУС — датчик угловых ускорений. То есть получить с него абсолютную цифру никак нельзя. Меньше, чем через минуту, обычный MEMS гироскоп на работающем коптере будет показывать низ в любом направлении, кроме истинного. И с лазерных или волоконно-оптических гироскопов тоже нельзя считать угол. Поэтому ставят акселерометры.
Проблему с показаниями акселерометра при эволюциях решили пол столетия назад — с помощью фильтра Калмана.
Проблему с показаниями акселерометра при эволюциях решили пол столетия назад — с помощью фильтра Калмана.
Гироскоп (MEMS, который на кристалле) никогда не скажет где «низ», он отдает угловую скорость, которую можно преобразовать в угол, который во-первых надо откуда то отсчитывать, а во-вторых датчик очень шумный и если начальное состояние взять на «параллельно земли», то через некоторое время угол будет сильно уплывать, в то время как акселерометр «чувствует гравитацию» (и поэтому знает где «низ») и помогает скорректировать постоянно уплывающих угол гироскопа.
Для механического гироскопа это конечно не актуально (или актуально, но в меньшей степени).
Акселерометр при всем при этом неверотяно шумный — уже пытались его использовать для корректировки по ускорению X и Y и даже удержание высоты по Z, но вроде бы так ничего не вышло толкового и хорошо работающего.
Для механического гироскопа это конечно не актуально (или актуально, но в меньшей степени).
Акселерометр при всем при этом неверотяно шумный — уже пытались его использовать для корректировки по ускорению X и Y и даже удержание высоты по Z, но вроде бы так ничего не вышло толкового и хорошо работающего.
Ну и в дополнении — если ветер будет примерно с одинаковой скоростью дуть, то на датчике будут всегда нули, т.к. ускорения по сути нет или оно очень маленькое, а многомоторную мясорубку в этот момент может нести с довольно большой скоростью куда нибудь на человека.
А какой от этого прок для вертолетов с одним несущим винтом? Тут гироскопом и регулировкой оборотов не обойтись — надо автоматом перекоса и рулевым винтом управлять.
Такой же как для самолетов, т.к. подключать можно не только регуляторы скорости с мотором, но и сервы, которые будут рулить нужными частями вертолета. Пример работы стабилизации на вертолете и на летающем крыле.
Хотелось бы добавить
Для гексокоптера не работает приемник — в config.h требует раскоментировать строку #define A0_A1_PIN_HEX, а для задействования дополнительного канала РУ можно раскоментировать одну из строк #define RCAUXPIN8 или #define RCAUXPIN12 и подключить канал приемника к D8 или D12
Приемник не неработает, а двигаются только два каналса, yaw и pitch допустим — не двигаются. тогда после раскомментирования строки #define A0_A1_PIN_HEX нужно 5 и 6 двигатель подключать уже на контакты A0 и A1
Еще момент — на той плате что на фото в топике так же можно распаять самостоятельно порт i2c — и подключить GPS туда. либо же GPS так же можно подключить в порт UART, но там свои тонкости.
Еще к плате можно подключить Bluetooth модуль для управления настройками с Android — что весьма удобно, нежели брать с собой ноут и цепляться кабелем. сам еще не пробовал — идет модуль еще.
Для гексокоптера не работает приемник — в config.h требует раскоментировать строку #define A0_A1_PIN_HEX, а для задействования дополнительного канала РУ можно раскоментировать одну из строк #define RCAUXPIN8 или #define RCAUXPIN12 и подключить канал приемника к D8 или D12
Приемник не неработает, а двигаются только два каналса, yaw и pitch допустим — не двигаются. тогда после раскомментирования строки #define A0_A1_PIN_HEX нужно 5 и 6 двигатель подключать уже на контакты A0 и A1
Еще момент — на той плате что на фото в топике так же можно распаять самостоятельно порт i2c — и подключить GPS туда. либо же GPS так же можно подключить в порт UART, но там свои тонкости.
Еще к плате можно подключить Bluetooth модуль для управления настройками с Android — что весьма удобно, нежели брать с собой ноут и цепляться кабелем. сам еще не пробовал — идет модуль еще.
сначала ответил и толкьо потом посмотрел кто топик писал =)
=) а еще про гексу я написал в статье
я цитировал — не видно просто. ты не указал что моторы надо в другое место втыкать =)
Я оставил ссылку на airm.ru
Если описывать все нюансы и возможности, то тут выйдет цикл статей, которые еще и устареют быстро. Целью было заинтересовать контроллером, тем более что новый криус всего 25$ стоит и есть готовые удобные модули для подключения GPS.
А сам я хочу на ARM переходить, на гудлаке заказал платку, посмотрю что за зверь, но чую мозговыноса будет больше чем полетов, AVR уже обсосан со всех сторон.
Если описывать все нюансы и возможности, то тут выйдет цикл статей, которые еще и устареют быстро. Целью было заинтересовать контроллером, тем более что новый криус всего 25$ стоит и есть готовые удобные модули для подключения GPS.
А сам я хочу на ARM переходить, на гудлаке заказал платку, посмотрю что за зверь, но чую мозговыноса будет больше чем полетов, AVR уже обсосан со всех сторон.
Можно ли управлять с ноутбука? Bluetooth, wi-fi, 3g?
На одном из китайских магазинов появилась сегодня плата:
Парсер чего то скушал.
извините, сорвалось)
www.goodluckbuy.com/gy80-bmp085-nine-axis-imu-magnetic-acceleration-gyro-atmospheric-module-.html
Price: $34.59 SKU: 84324
«GY80 BMP085 Nine-axis IMU Magnetic Acceleration Gyro Atmospheric Module»
— Nine-axis module (Three-axis gyroscope + triaxial accelerometer + 3-axis magnetic field + pressure)
— Immersion Gold PCB process
— The use of chip: L3G4200D + the ADXL345 + HMC5883L + BMP085
— Power supply :3-5v
Что скажете про такой комплект и не является ли это тем самым оптимальным вариантом который купил и поставил махом все датчики? Если так, то может в пост добавить даже. Я бы с удовольствием ставил 1 платку чем кучу разрозненных датчиков.
www.goodluckbuy.com/gy80-bmp085-nine-axis-imu-magnetic-acceleration-gyro-atmospheric-module-.html
Price: $34.59 SKU: 84324
«GY80 BMP085 Nine-axis IMU Magnetic Acceleration Gyro Atmospheric Module»
— Nine-axis module (Three-axis gyroscope + triaxial accelerometer + 3-axis magnetic field + pressure)
— Immersion Gold PCB process
— The use of chip: L3G4200D + the ADXL345 + HMC5883L + BMP085
— Power supply :3-5v
Что скажете про такой комплект и не является ли это тем самым оптимальным вариантом который купил и поставил махом все датчики? Если так, то может в пост добавить даже. Я бы с удовольствием ставил 1 платку чем кучу разрозненных датчиков.
я бы не стал ставить с bmp085, если нужно удержание высоты
на том же гудлаке лучше что-то из этого www.goodluckbuy.com/index.php?target=products&mode=search&q=ms5611 (на выбор — плата датчиков, плата с AVR и плата с ARM)
Летать среди ЛЭП — это нормально?
Sign up to leave a comment.
О полетном контроллере MultiWii (коптеры, самолеты и вертолеты)