В начале этого года достойный гражданин Ariman написал статью о том, как прикрутить к микроконтроллеру ёмкостный сенсор прикосновения. Эта идея показалась мне довольно перспективной, некоторым приборам сенсорные клавиши подошли бы куда лучше механических. В этой статье я расскажу о своей реализации этой полезной технологии на основе отладочной платы STM32 Discovery.
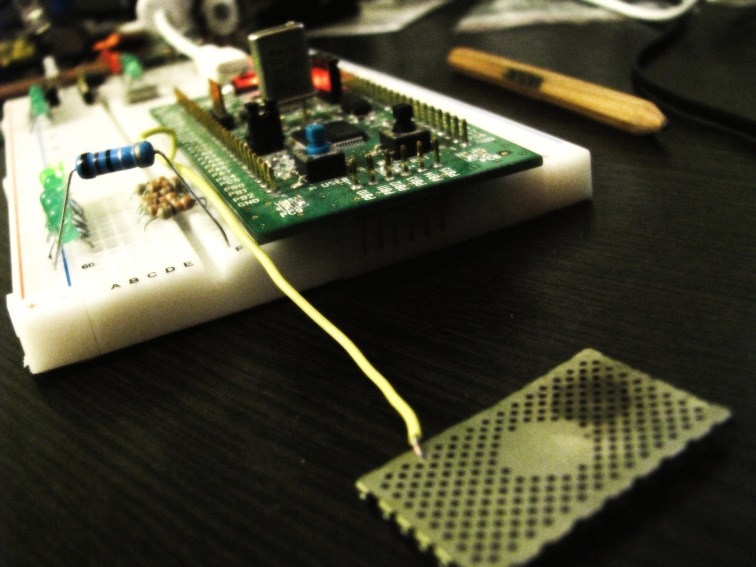
Итак, только начав осваивать STM32, я решил в качестве упражнения добавить устройству способность определять прикосновения. Начав разбираться с теорией и практикой по вышеупомянутой статье, я повторил схему товарища Ariman'a. Она работала идеально, но мне, любителю минимализма, захотелось её упростить, избавившись от лишних элементов. Лишними на мой взгляд оказались внешний резистор и дорожка к питанию. Всё это уже есть в большинстве микроконтроллеров, в том числе в AVR и в STM32. Я имею в виду подтягивающие резисторы портов ввода/вывода. Почему бы не заряжать пластинку и наши пальцы через них? В ожидании подвоха я собрал на макетке схему, которая, к моему удивлению, заработала с первого же раза. Собственно говоря, схемой это называть даже смешно, ведь всё что нам нужно — это просто подсоединить контактную пластинку к ножке отладочной платы. Всю работу на себя возьмёт микроконтроллер.
Что же из себя представляет программа? Во первых две функции:
Первая выводит на ножку сенсора (нулевой пин регистра C) логический «0»
void Sensor_Ground (void)
{
GPIOC->CRL = 0x1;
GPIOC->BRR |= 0x1;
}Вторая настраивает тот же вывод на вход, с подтяжкой к питанию.
void Sensor_InPullUp (void)
{
GPIOC->CRL = 0x8;
GPIOC->BSRR |= 0x1;
}Теперь в начале цикла опроса вызовем Sensor_Ground(), и подождём некоторое время чтобы разрядить на землю весь остаточный заряд на сенсоре. Затем обнулим переменную count, которой будем считать время зарядки сенсора и вызовем Sensor_InPullUp().
Sensor_Ground();
Delay(0xFF); //простой пустой счётчик
count = 0;
Sensor_InPullUp();Теперь сенсор начинает заряжаться через внутренний подтягивающий резистор номиналом порядка десятков КОм (30..50КОм у STM32). Постоянная времени такой цепи будет равняться считанным тактам, поэтому я поменял кварцевый резонатор на отладочной плате на более быстрый, 20МГц (кстати, я не сразу заметил, что оказывается на STM32 Discovery кварц меняется без пайки). Итак считаем такты процессора, пока на входе не появится логическая единица:
while(!(GPIOC->IDR & 0x1))
{
count++;
}После выхода из этого цикла в переменной count будет храниться число, пропорциональное ёмкости сенсорной пластинки. В моём случае с чипом на 20МГц значение count равняется 1 при отсутствии нажатия, 7-10 при самом лёгком касании, 15-20 при нормальном прикосновении. Остаётся лишь сравнить её с пороговым значением и не забыть снова вызвать Sensor_Ground(), чтобы к следующему циклу опроса сенсор уже был разряжен.
Полученной чувствительности хватает для уверенного определения прикосновений к голым металлическим площадкам. При прикрытии сенсора листом бумаги или пластика чувствительность падает в три — четыре раза, хорошо определяются только уверенные нажатия. Чтобы увеличить чувствительность в случае, когда сенсор необходимо прикрыть защитным материалом, можно повысить тактовую частоту микроконтроллера.
По сравнению с реализацией Ariman'a, мой подход работает гораздо быстрее (порядка десятка тактов на опрос одного сенсора), поэтому я не стал усложнять программу, настраивая прерывания по таймеру.
Напоследок видео с демонстрацией работы сенсора.
Main.c тестовой программы.
Reference Manual на микроконтроллер
Cпасибо пользователю ALPINE63rus за очень полезную статью ARM-микроконтроллеры STM32F. Быстрый старт c STM32-Discovery, пользователю Ariman за идею и доходчивое теоретическое описание.
UPD. После комментариев ew1abz'a я решил разобраться с тактированием и обнаружил, что по умолчанию STM32 Discovery настроен на тактовую частоту
(HSE / 2) * 6 = 24 MHz, где HSE — частота внешнего кварца. Соответственно поменяв кварц с 8 на 20 МГц, я заставил бедную STM'ку работать на 60 МГц. Так что во-первых, некоторые из выводов очевидно не совсем верны, во-вторых то чем я занимался может привести к сбоям чипа. На случай таких сбоев в микроконтроллере есть HardFault прерывание, воспользовавшись им, я проверил более высокие частоты. Так вот, сбоить чип начинает только на 70 МГц. Но хотя эту конкретную программу контроллер переваривает на 60МГц, при использовании периферии или работе с Flash памятью он может повести себя непредсказуемо. Вывод: относитесь к данному топику как к эксперименту, повторяйте только на свой страх и риск.
