Исследователи из Калифорнийского университета в Беркли разработали структуру Framework for Efficient Robotic Manipulation (FERM), которая обучает роботизированную руку шести разным задачам в течение 25 минут со средним показателем успеха 96,7%.
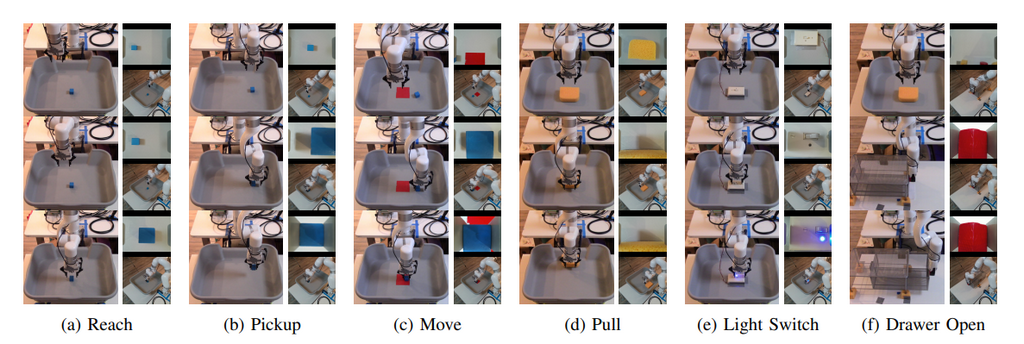
Авторы разработки утверждают, что FERM достаточно 10 демонстраций длительностью от 15 до 50 минут, чтобы научить робозахват дотягиваться, выбирать, перемещать и тянуть большие объекты, а также щелкать выключателем и открывать ящики.
Такому быстрому обучению способствует «пиксельное» усиление — тип машинного обучения, при котором алгоритмы учатся выполнять задачи из записанных демонстраций. Как объясняют исследователи, FERM сначала собирает небольшое количество демонстраций и сохраняет их в «буфере воспроизведения». Алгоритм машинного обучения кодировщика предварительно обучается на демонстрационных данных, содержащихся в буфере. Затем алгоритм обучения с подкреплением в FERM тренируется на изображениях, «дополненных» данными, сгенерированными как кодировщиком, так и первоначальными демонстрациями.
 Архитектура FERM
Архитектура FERMДля создания FERM нет необходимости использовать сложное оборудование. Система включает робота, графическую карту, две камеры, несколько демонстраций и функцию вознаграждения, которая направляет алгоритм обучения с подкреплением к цели.
После обучения робозахват способен работать даже с предметами, которых не было на демонстрациях. Кроме того, он способен преодолевать препятствия на пути к целевому объекту.
Исследователи отмечают, что показатели, используемые для измерения прогресса в работе робозахвата, могут варьироваться в зависимости от задачи. Для роботов, работающих в критически важной среде, например, в космосе, наибольшее значение будет иметь точность.
В следующем году свою автономную роборуку запустит на МКС компания GITAI. Роборука будет работать на борту модуля воздушного шлюза Nanoracks Bishop. GITAI S1 представляет собой руку с 8 степенями свободы, встроенной сенсорной и вычислительной системой. У нее будет доступ к панели управления и небольшой зоне сборки для выполнения задач внутри корабля. Роборука также будет выполнять некоторые задачи в космосе, например, прикреплять панели солнечной батареи.
См. также:
