В Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института (CSAIL) и лаборатории Senseable City Lab разрабатывают автономные лодки серии Roboat. Они будут перевозить пассажиров и грузы в Амстердаме.
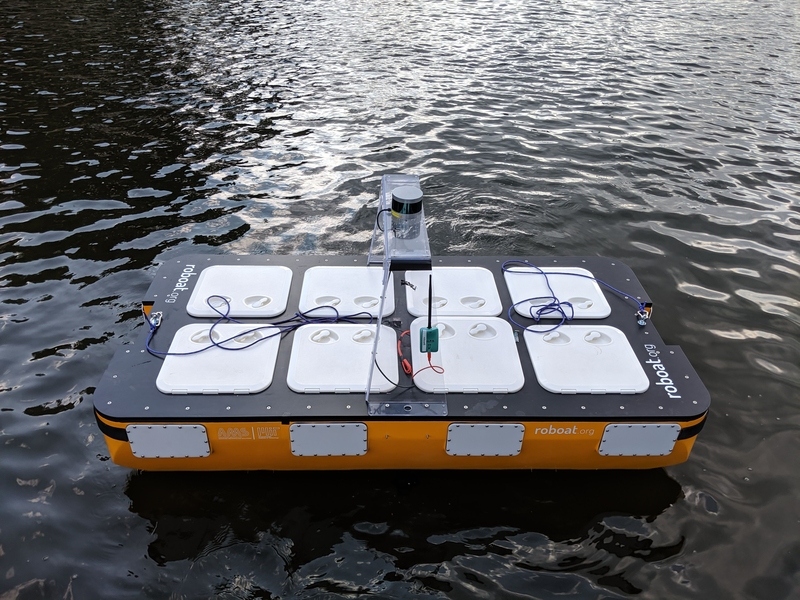
Беспилотные лодки уже существуют, но до этого их не масштабировали для перевозки пассажиров. Длина первой роболодки Roboat была всего 1 м. Следующая модель, Roboat II, имеет уже 2 метра в длину и может вмещать двух человек. Третья лодка Roboat III, которая сейчас строится, будет имеет длину 4 метра и предназначаться для перевозки 4-6 пассажиров.
Roboat II тестировали в Амстердаме, где она свободно перемещалась по городским каналам в течение трех часов, и вернулась в к исходной точке с погрешностью всего 0,17 метра.
Исследователи отмечают, что Roboat II перемещается автономно, используя алгоритмы, подобные тем, которые задействованы в работе беспилотных автомобилей, но адаптированы для водной среды.
Ученые работают над системой координации таких лодок. Она использует распределенный контроллер, который представляет собой набор датчиков и связанных компьютеров. Между подключенными к системе роболодками нет прямой связи, а пункт назначения знает только лидер. Он начинает движение к месту назначения, а другие роболодки оценивают путь и согласовывают свои движения.
В разработке системы используется новый алгоритм для одновременной локализации и сопоставления (SLAM). Когда нужно доставить пассажира, системный координатор назначает эту задачу незанятой лодке, которая находится ближе всего к этому пассажиру. Roboat забирает человека и прокладывает реальный путь к желаемому месту назначения в зависимости от текущих условий. При помощи SLAM лидаров и GPS-датчиков определяются ее местоположение, скорость и другие параметры. Контроллер отслеживает работу планировщика, который обновляет путь, чтобы избежать препятствий и потенциальных столкновений.
Сейчас SLAM уже обеспечивает более высокую точность локализации для Roboat и позволяет выполнять онлайн-картографирование во время навигации.
Однако транспортировка с использованием группы водных транспортных средств создает уникальные проблемы, с которыми исследователи не сталкивались в воздухе или на земле. Большую роль начинают играть инерция и нагрузка транспортных средств.
В будущем команда планирует улучшить роболодки, чтобы их можно было использовать в открытых водоемах с течениями и волнами.
См. также:
