Когда заходит речь про программирование на C# .NET для одноплатных компьютеров, то разговоры крутятся только в основном вокруг Raspberry Pi на Windows IoT. А как же Banana/Orange/Rock/Nano Pi, Odroid, Pine64 и другие китайские одноплатные компьютеры работающие на Linux? Так давайте это исправим, установим .NET 5 на Banana Pi BPI-M64 (ARM64) и Cubietruck (ARM32), и будем управлять контактами GPIO из C# в Linux. В первой части серии постов, подключим светодиод и кнопку для отработки прерываний и рассмотрим библиотеку Libgpiod (спойлер, библиотеку так же можно использовать в C++, Python) для доступа к контактам GPIO.
Предисловие
Управление светодиодом и получение событий от кнопки будет реализовано через библиотеку Libgpiod, которая не является частью платформы .NET. Данная библиотека предоставляет доступ к GPIO из любого языка программирования, требуется лишь написание класса обертки.
Данный пост применим не только к платам Banana Pi BPI-M64 и Cubietruck, но и другим, основанных на процессоре ARM архитектуры armv71(32-bit) и aarch64 (64-bit). На Banana Pi BPI-M64 (ARM64) и Cubietruck (ARM32) установлена ОС — Armbian версии 21.02.1, основанная на Ubuntu 18.04.5 LTS (Bionic Beaver), ядро Linux 5.10.12. uname: Linux bananapim64 5.10.12-sunxi64 #21.02.1 SMP Wed Feb 3 20:42:58 CET 2021 aarch64 aarch64 aarch64 GNU/Linux
Armbian — это самый популярный дистрибутив Linux, предназначенный для одноплатных компьютеров построенных на ARM процессоре, список поддерживаемых плат огромен: Orange Pi, Banana Pi, Odroid, Olimex, Cubietruck, Roseapple Pi, Pine64, NanoPi и др. Дистрибутив Armbain основан на Debian и Ubuntu. Из большого перечня поддерживаемых одноплатных компьютеров можно выбрать то решение, которое лучше всего походит для вашего IoT проекта, от максимально энергоэффективных до высокопроизводительных плат с NPU. И на базе всех этих одноплатных компьютеров, вы сможете реализовать свое решения на платформе .NET и работать с периферийными устройствами из кода на C#.
Что такое GPIO
GPIO (general-purpose input/output) — интерфейс ввода/вывода общего назначения. GPIO подключены напрямую к «процессору» SoC (System-on-a-Chip — Система на кристалле), и неправильное использование может вывести его из строя. Большинство одноплатных компьютеров, кроме обычных двунаправленных Input/Output портов, имеют один или более интерфейсов: UART, SPI, I²C/TWI, PWM (ШИМ), но не имеют ADC (АЦП). GPIO - порты обычно могут быть сконфигурированны на ввод или вывод (Input/Output), состояние по умолчанию обычно INPUT.
Некоторые «GPIO»-порты — являются просто питающими портами 3.3V, 5V и GND, они не связаны с SoC и не могут использоваться как либо еще.
Порты с альтернативной функцией - могут быть мультиплексированны с одним из соответствующих ему интерфейсов.
Порты в режиме INPUT могут генерировать прерывания — по спаду, по фронту, по логическому уровню, по изменению сигнала и в асинхронном режиме по фронту и спаду. Порты в режиме INPUT имеют входную фильтрацию на триггере Шмитта (преобразовывают аналоговый сигнал в цифровой с резкими переходами между состояниями).
Работа с контактами GPIO осуществляется через виртуальную файловую систему sysfs. стандартный интерфейс для работы с контактами sysfs впервые появился с версии ядра 2.6.26, в Linux. Работа с GPIO проходит через каталог /sys/class/gpio путём обращения к файлам-устройствам.
К портам GPIO подключаются:
- светодиоды;
- кнопки;
- реле;
- температурные и другие датчики;
- различные периферийные устройства.
Для программирования GPIO существует несколько способов обращения:
- Посредством файл-устройства GPIO;
- Используя языки программирования:
- Через прямое обращение к регистрам чипа;
- Используя уже готовые библиотеки (libgpiod).
Одноплатный компьютер Banana Pi BPI-M64
Banana Pi BPI-M64 — это 64-битный четырехъядерный мини-одноплатный компьютер, поставляемый как решение с открытым исходном кодом. Ядром системы является процессор Allwinner A64 с 4-мя ядрами Cortex-A53 с частотой 1.2 ГГц. На плате размещено 2 ГБ DDR3 SDRAM 733МГц оперативной памяти и 8 ГБ eMMC.
На плате размещен 40-контактный совместимый с Raspberry Pi разъем, который содержит: GPIO (x28), Power (+5V, +3.3V and GND), UART, I2C, SPI. И 40-контактный интерфейс MIPI DSI.
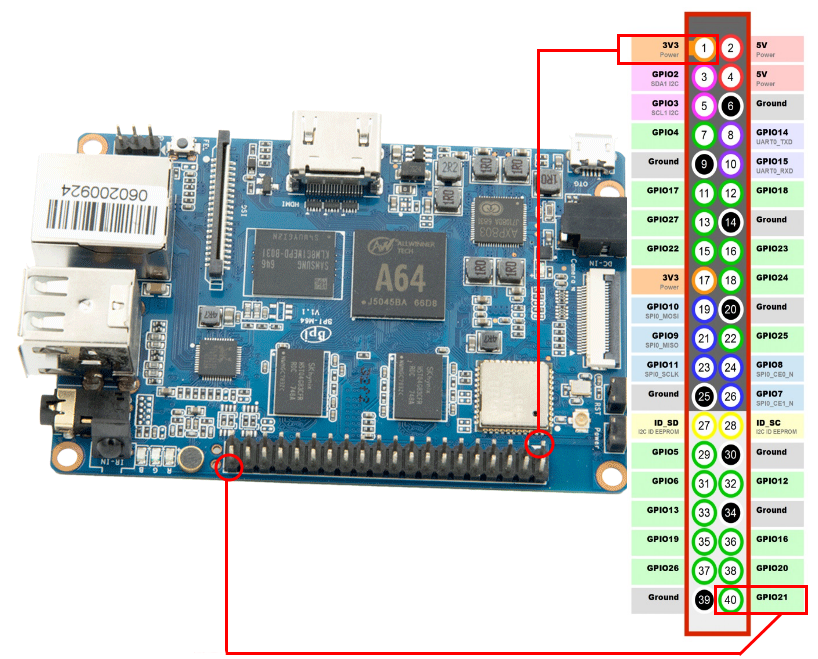
Banana Pi BPI-M64 и 40-контактный разъем типа Raspberry Pi 3
Наличие 40-контактного разъема типа Raspberry Pi 3 GPIO, существенно облегчает подключение датчиков из-за совпадение назначение контактов с Raspberry Pi 3. Не приходится гадать к какому контакту подключать тот или иной датчик. Указанные в посте датчики (светодиод и кнопка) подключенные к Banana Pi BPI-M64, можно подключать на те же самые контакты другого одноплатного компьютера, на котором тоже есть 40-контактный разъем, типа Raspberry Pi 3 (или к самой Raspberry Pi 3, разницы нет никакой). Единственное, необходимо изменить номера контактов (линий, ножка процессора) в программном коде, т.к. они зависят от используемого процессора. Но легко определяются но названию контакта. Плата Cubietruck (ARM32) приведена для проверки совместимости и работы кода на 32-разрядных ARM процессорах.
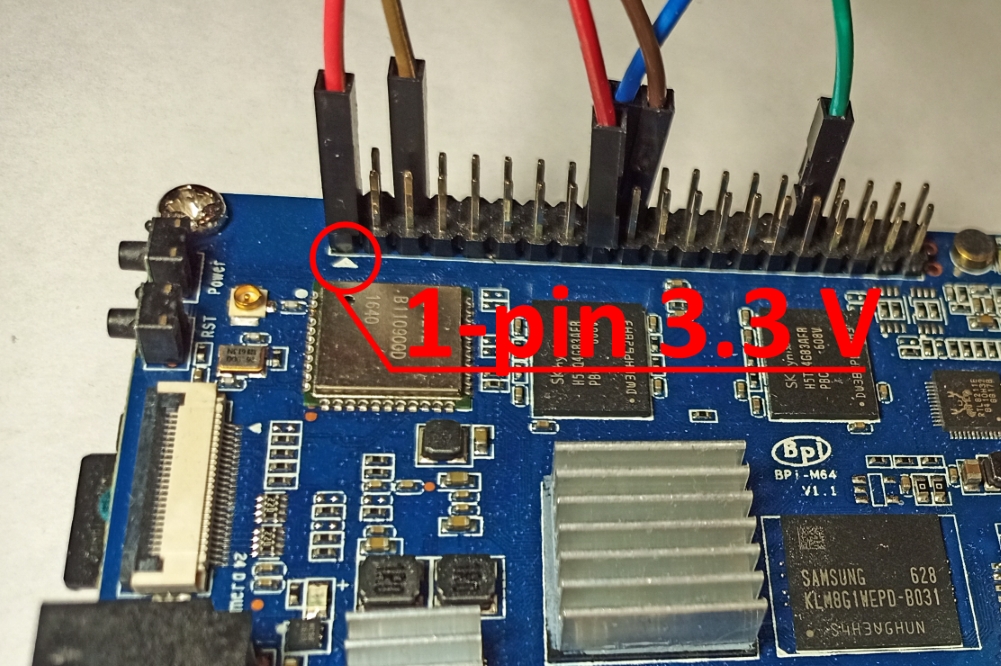
Позиция [1] 3V3 power соответствует позиции на плате со стрелочкой
Формула для вычисления номера GPIOXX
Для обращение к контактам из C# кода необходимо знать порядковый номер (линия, порт) физической ножки процессора SoC(для Allwinner). Эти данные в спецификациях отсутствую, т.к. порядковый номер получаем путем простого расчета. Например, из схемы возьмем 32-контакт на разъеме типа Raspberry Pi. Название контакта PB7, для получения номера контакта на процессоре произведем расчет по формуле:
(позиция буквы в алфавите — 1) * 32 + позиция вывода. Первая буква не учитывается т.к. P — PORT, позиция буквы B в алфавите = 2, получаем (2-1) * 32 + 7 = 39. Физический номер контакта PB7 является номер 39. У каждого разработчика SoC может быть свой алгоритм расчета номера контактов, должен быть описан в Datasheet к процессору.
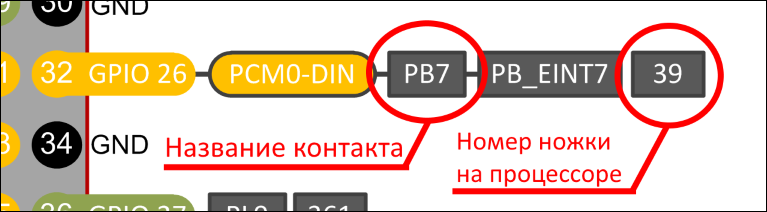
Контакт «PB7» на процессоре Allwiner A64, номер ножки — 39
Библиотеки .NET IoT
До того как напишем первую программу на C# по управления GPIO, необходимо рассмотреть пространство имен входящих в dotnet/iot. Все используемые библиотеки добавляются через Nuget пакеты. Подробно рассмотрим драйвера для получения доступа к контактам GPIO одноплатного компьютера. Код на C# взаимодействует с GPIO через специальный драйвер, который является абстракцией доступа к GPIO и позволяет переносить исходный код от одного одноплатного компьютера к другому, без изменений.
Пространства имен .NET IoT:
- System.Device.Gpio. Пакет System.Device.Gpio поддерживает множество протоколов для взаимодействия с низкоуровневыми аппаратными интерфейсами:
- General-purpose I/O (GPIO);
- Inter-Integrated Circuit (I2C);
- Serial Peripheral Interface (SPI);
- Pulse Width Modulation (PWM);
- Serial port.
- Iot.Device.Bindings. Пакет Iot.Device.Bindings содержит:
- Драйвера и обертки над System.Device.Gpio для различных устройств которые упрощают разработку приложений;
- Дополнительные драйвера поддерживаемые сообществом (community-supported).
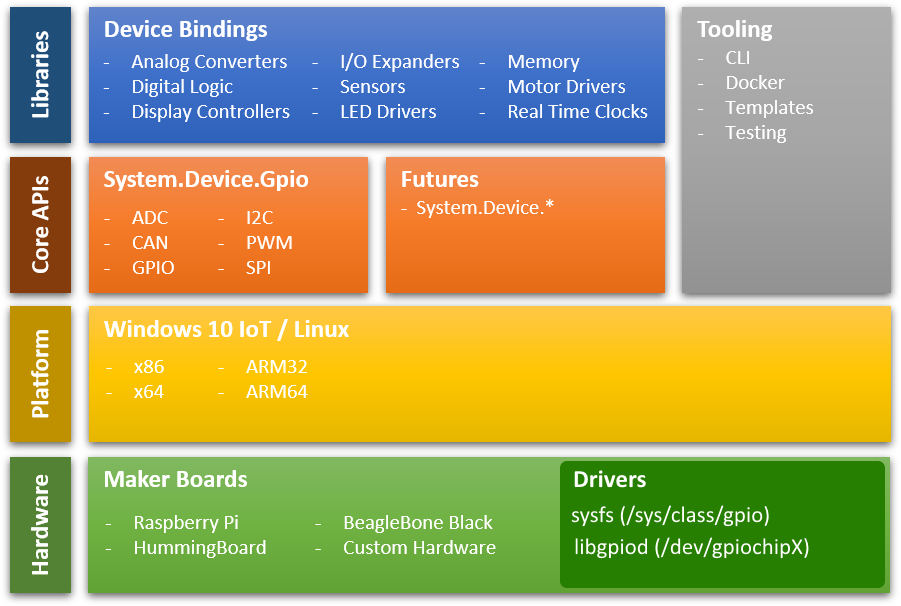
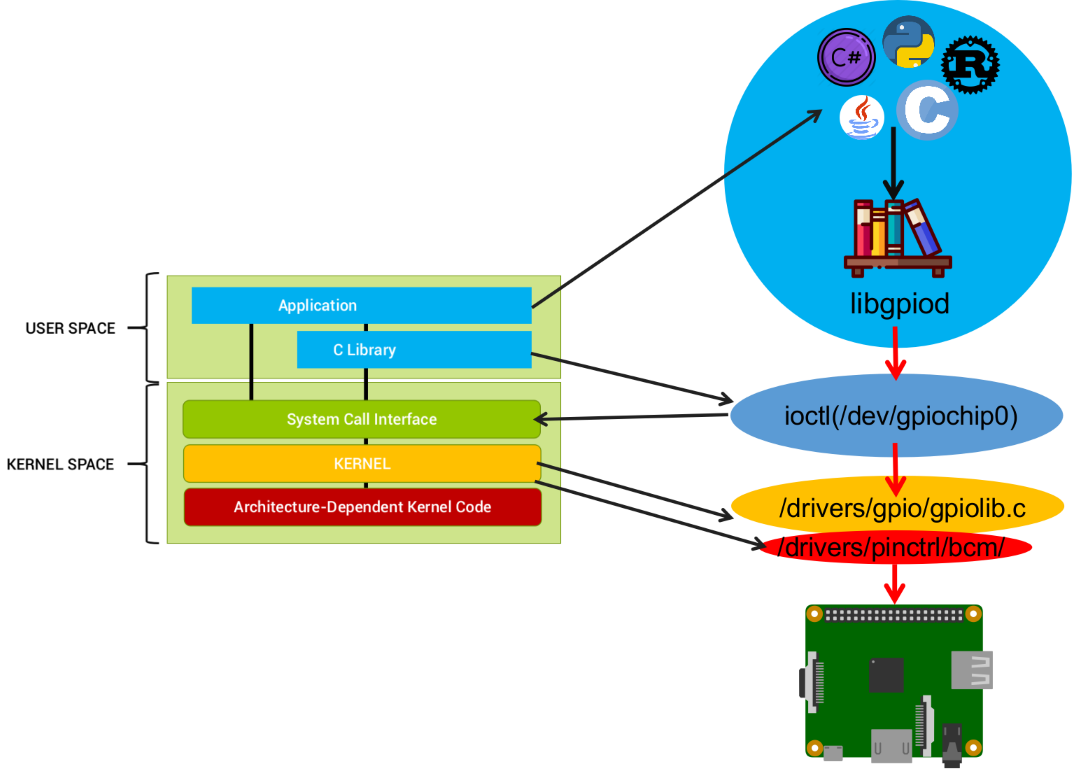
Стек библиотек .NET IoT
Рассмотрим первую программу типа Hello World, мигание светодиода (Blink an LED):
using System;
using System.Device.Gpio;
using System.Threading;
Console.WriteLine("Blinking LED. Press Ctrl+C to end.");
int pin = 18;
using var controller = new GpioController();
controller.OpenPin(pin, PinMode.Output);
bool ledOn = true;
while (true)
{
controller.Write(pin, ((ledOn) ? PinValue.High : PinValue.Low));
Thread.Sleep(1000);
ledOn = !ledOn;
}
Разбор кода:
- using System.Device.Gpio — пространство имен для использования контроллера GpioController доступа к аппаратным ресурсам;
- using var controller = new GpioController() — создает экземпляр контроллера для управления контактами GPIO;
- controller.OpenPin(pin, PinMode.Output) — инициализирует контакт pin = 18 на вывод, к 18 контакту подключен светодиод;
- controller.Write(pin, ((ledOn)? PinValue.High: PinValue.Low)) — если ledOn принимает значение True, то PinValue.High присваивает высокое значение 18 контакту и светодиод загорается. На 18 контакт подается напряжение в 3.3V. Если ledOn принимает значение False, то PinValue.Low присваивает низкое значение контакту 18 и светодиод гаснет. На 18 контакт подается напряжение в 0V (или минимальное пороговое для значения «0», может быть немного выше 0V).
Далее остается компиляция под ARM архитектуру: dotnet publish -r linux-arm или dotnet publish -r linux-arm64. Но так работает просто только для Raspberry Pi. При использование одноплатных компьютерах отличных от Raspberry Pi необходимо при инициализации GpioController выбирать драйвер доступа к GPIO.
Драйвера доступа к GPIO из .NET
Классы драйверов доступа к GPIO находятся в пространстве имен System.Device.Gpio.Drivers. Доступны следующие драйвера-классы:
- HummingBoardDriver — GPIO драйвер для платы HummingBoard на процессоре NXP i.MX 6 Arm Cortex A9;
- LibGpiodDriver — этот драйвер использует библиотеку Libgpiod для получения доступа к портам GPIO, заменяет драйвер SysFsDriver. Библиотека Libgpiod может быть установлена на Linux и Armbian, не является аппаратно-зависимой, что позволяет ее использовать для различных одноплатных компьютерах ARM32 и ARM64;
- RaspberryPi3Driver — GPIO драйвер для одноплатных компьютеров Raspberry Pi 3 или 4;
- SysFsDriver — GPIO драйвер работающий поверх интерфейса SysFs для Linux и Unux систем, предоставляет существенно меньше возможностей, чем драйвер LibGpiodDriver, но не требует установки библиотеки Libgpiod. Тот случай, когда хочется просто попробовать помигать светодиодом из C# без дополнительных действий;
- UnixDriver — базовый стандартный класс доступа к GPIO для Unix систем;
- Windows10Driver — GPIO драйвер для ОС Windows 10 IoT. Из поддерживаемых плат только Raspberry Pi, весьма ограниченное применение.
В данном посте будет рассматриваться доступ к GPIO через драйвер LibGpiodDriver. Драйвер SysFsDriver базируется на устаревшем методе работы с GPIO через виртуальную файловую систему SysFs. Для решений IoT, SysFs не подходит по трем серьезным причинам:
- Низкая скорость работы I/O;
- Есть проблемы с безопасной работой с GPIO при совместном доступе;
- При контейнеризации приложения на C# в контейнер придется пробрасывать много путей из файловой системы Linux, что создается дополнительные сложности. При использование библиотеки Libgpiod этого не требуется.
Библиотека Libgpiod предназначена для работы с GPIO не только из .NET кода, но и из Python, C++, и т.д. Поэтому ниже изложенная инструкция по установке библиотеки Libgpiod позволит разработчикам на Python реализовывать подобную функциональность, как и на C#. В состав пакета Libgpiod входят утилиты для работы с GPIO. До создание программы на C#, поработаем с датчиками через эти утилиты.
Схема подключения светодиода (LED) и кнопки
Подключать светодиод и кнопку будем на 40-контактный разъем совместимый с Raspberry Pi 3. Светодиод будет подключен на №33 контакт разъема, название контакта «PB4», номер линии — 36. Кнопка будет подключен на №35 контакт разъема, название контакта «PB6», номер линии — 38. Необходимо обратить внимание на поддержку прерывания на контакте «PB6» для кнопки. Поддержка прерывания необходима для исключения постоянного опроса линии с помощью CPU. На контакте «PB6» доступно прерывание «PB_EINT6», поэтому кнопку к этому контакту и подключим. Например, соседний контакт «PL12» не имеет прерывание, поэтому подключать кнопку к нему кнопку не будем. Если вы подключаете кнопку и резистор напрямую, то не забывайте в цепь добавить резистор для сопротивления для избежания выгорания порта!
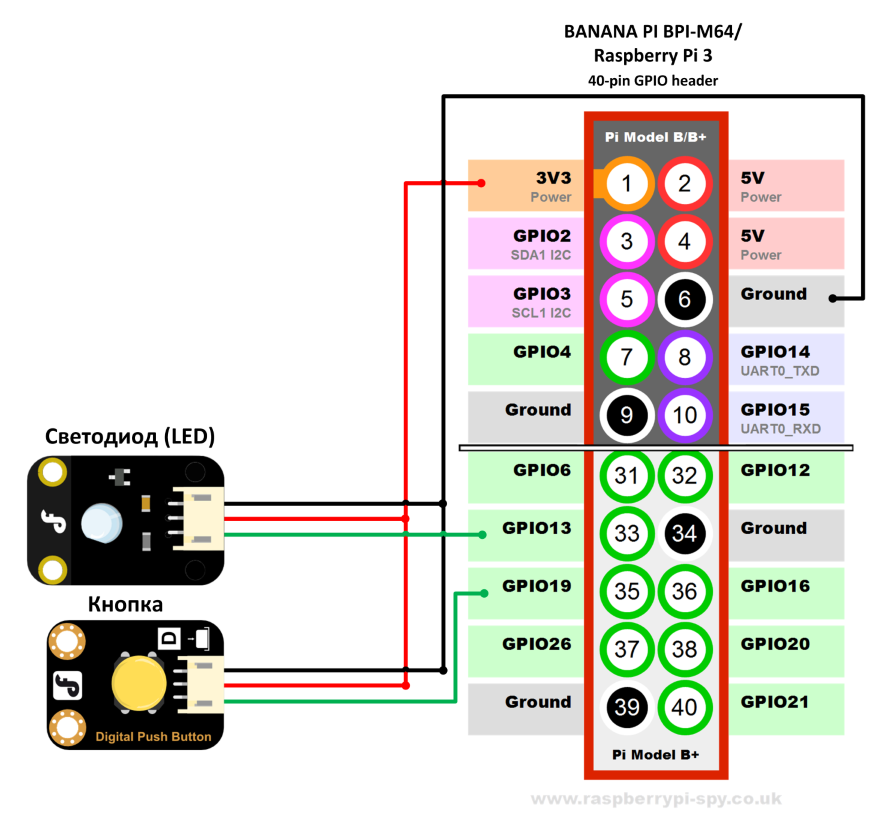
Схема подключения светодиода (LED) и кнопки к 40-контактному разъему совместимый с Raspberry Pi 3
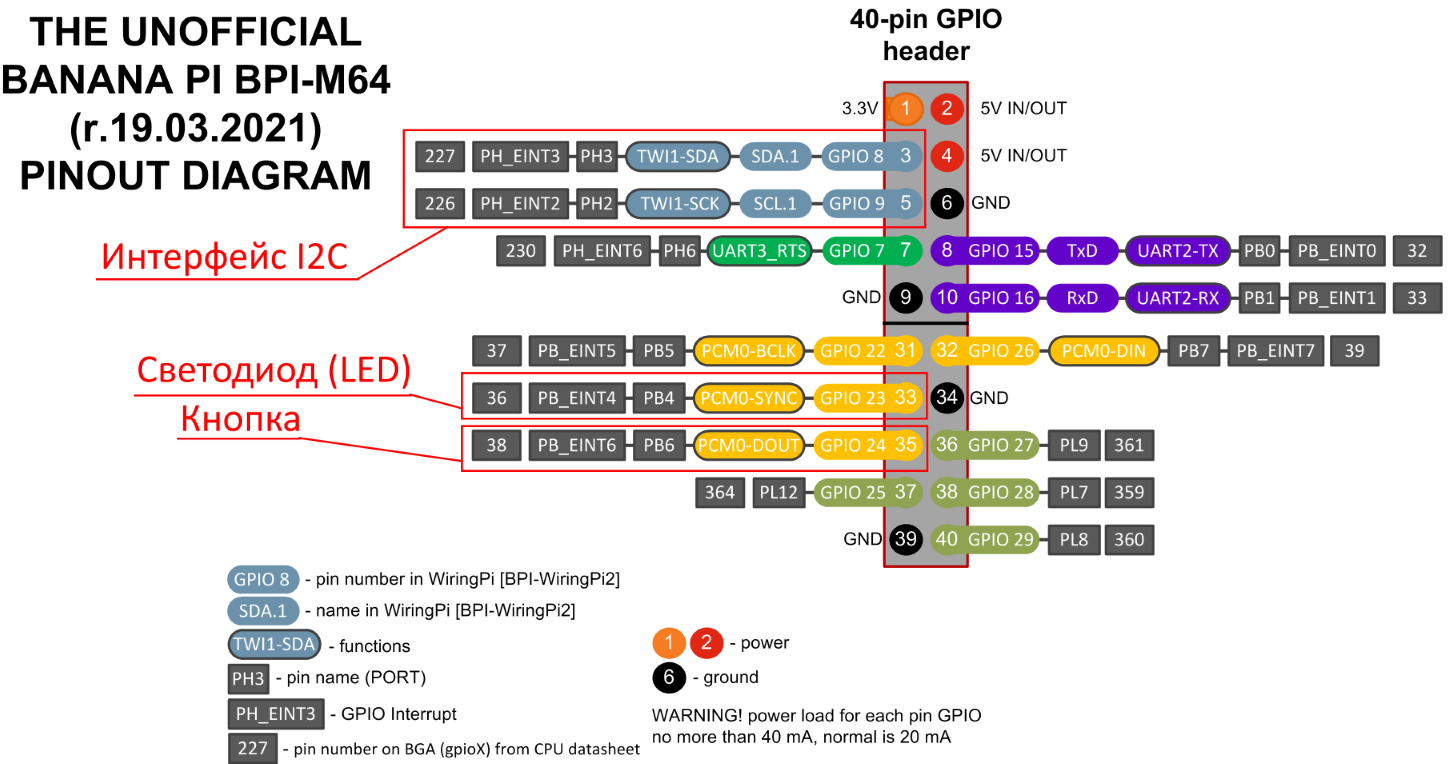
Схема назначения контактов к которым подключается светодиод (LED) и кнопка
Интерфейс GPIO ядра Linux
GPIO (General-Purpose Input/Output) является одним из наиболее часто используемых периферийных устройств во встраиваемых системах (embedded system) Linux.
Во внутренней архитектуре ядро Linux реализует доступ к GPIO через модель производитель/потребитель. Существуют драйверы, которые предоставляют доступ к линиям GPIO (драйверы контроллеров GPIO) и драйверы, которые используют линии GPIO (клавиатура, сенсорный экран, датчики и т. д.).
В ядре Linux система gpiolib занимается регистрацией и распределением GPIO. Эта структура доступна через API как для драйверов устройств, работающих в пространстве ядра (kernel space), так и для приложений пользовательского пространства (user space).
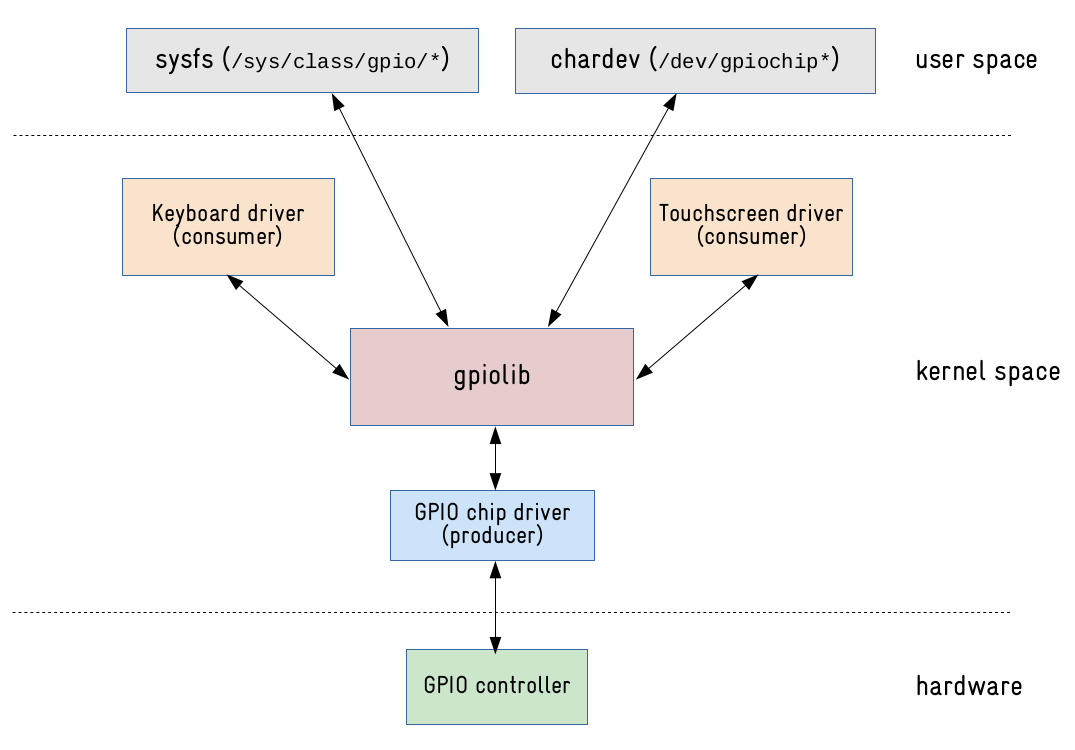
Схема работы gpiolib
Старый путь: использование виртуальной файловой системы sysfs для доступа к GPIO
До версии ядра Linux 4.7 для управления GPIO в пользовательском пространстве использовался интерфейс sysfs. Линии GPIO были доступны при экспорте по пути /sys/class/gpio. Так, например, для подачи сигнала «0» или «1» на линию GPIO, необходимо:
- Определить номер линии (или номер ножки процессора) GPIO;
- Экспортировать номер GPIO, записав его номер в /sys/class/gpio/export;
- Конфигурировать линию GPIO как вывод, указав это в /sys/class/gpio/gpioX/direction;
- Установить значение «1» или «0» для линии GPIO /sys/class/gpio/gpioX/value;
Для наглядности установим для линии GPIO 36 (подключен светодиод) из пользовательского пространства, значение «1». Для этого необходимо выполнить команды:
# echo 36 > /sys/class/gpio/export
# echo out > /sys/class/gpio/gpio36/direction
# echo 1 > /sys/class/gpio/gpio36/value
Этот подход очень простой как и интерфейс sysfs, он неплохо работает, но имеет некоторые недостатки:
- Экспорт линии GPIO не связан с процессом, поэтому если процесс использующий линию GPIO аварийно завершит свою работу, то эта линия GPIO так и останется экспортированной;
- Учитываю первый пункт возможен совместный доступ к одной и той же линии GPIO, что приведет к проблеме совместного доступа. Процесс не может «узнать» у ОС используется ли та или иная линия GPIO в настоящий момент;
- Для каждой линии GPIO приходится выполнять множество операций open()/read()/write()/close(), а так же указывать параметры (export, direction, value, и т.д.) используя методы работы с файлами. Это усложняет программный код;
- Невозможно включить/выключить сразу несколько линий GPIO одним вызовом;
- Процесс опроса для перехвата событий (прерываний от линий GPIO) ненадежен;
- Нет единого интерфейса (API) для конфигурирования линий GPIO;
- Номера, присвоенные линиям GPIO непостоянны, их приходится каждый раз экспортировать;
- Низкая скорость работы с линиями GPIO;
Новый путь: интерфейс chardev
Начиная с ядра Linux версии 4.8 интерфейс GPIO sysfs объявлен как «deprecated» и не рекомендуется к использованию. На замену sysfs появился новый API, основанный на символьных устройствах для доступа к линиям GPIO из пользовательского пространства.
Каждый контроллер GPIO (gpiochip) будет иметь символьное устройство в разделе /dev, и мы можем использовать файловые операции (open(), read(), write(), ioctl(), poll(), close()) для управления и взаимодействия с линиями GPIO. контроллеры GPIO доступны по путям /dev/gpiochipN или /sys/bus/gpiochipN, где N — порядковый номер чипа. Просмотр доступных контроллеров GPIO (gpiochip) на Banana Pi BPI-M64:
root@bananapim64:~# ls /dev/gpiochip*
/dev/gpiochip0 /dev/gpiochip1 /dev/gpiochip2
Стек работы библиотеки libgpiod
Несмотря на то, что новый API предотвращает управление линиями GPIO с помощью стандартных инструментов командной строки, таких как echo и cat, он обладает весомыми преимуществами по сравнению с интерфейсом sysfs, а именно:
- Выделение линий GPIO связано с процессом, который он его использует. При завершение процесса, так же в случае аварийного завершения, линии GPIO используемые процессом освобождаются автоматически;
- Дополнительно, можно всегда определить какой процесс в данное время использует определенную линию GPIO;
- Можно одновременно читать и писать в несколько линий GPIO одновременно;
- Контроллеры GPIO и линии GPIO можно найти по названию;
- Можно настроить состояние вывода контакта (open-source, open-drain и т. д.);
- Процесс опроса для перехвата событий (прерывания от линий GPIO) надежен.
Библиотека libgpiod и инструменты управления GPIO
Для использования нового интерфейса символьного устройства есть библиотека и набор инструментов, предоставляемых проектом libgpiod.
Libgpiod (Library General Purpose Input/Output device) предоставляет набор API для вызова из своих программ и несколько утилит для управления линиями GPIO из пользовательского режима.
В состав libgpiod входят следующие утилиты:
- gpiodetect — выведет список всех чипов GPIO, их метки и количество линий;
- gpioinfo — выведет информацию о линиях GPIO конкретного контроллера GPIO. В таблице вывода по колонкам будет указано: номер линии, название контакта, направление ввода/вывода, текущее состояние;
- gpioget — считает текущее состояние линии GPIO;
- gpioset — установит значение для линии GPIO;
- gpiofind — выполняет поиск контроллера GPIO и линии по имени;
- gpiomon — осуществляет мониторинг состояния линии GPIO и выводит значение при изменение состояния.
Например, следующая программа написанная на C использует libgpiod для чтения строки GPIO:
void main() {
struct gpiod_chip *chip;
struct gpiod_line *line;
int req, value;
chip = gpiod_chip_open("/dev/gpiochip0");
if (!chip)
return -1;
line = gpiod_chip_get_line(chip, 3);
if (!line) {
gpiod_chip_close(chip);
return -1;
}
req = gpiod_line_request_input(line, "gpio_state");
if (req) {
gpiod_chip_close(chip);
return -1;
}
value = gpiod_line_get_value(line);
printf("GPIO value is: %d\n", value);
gpiod_chip_close(chip);
}
Библиотеку можно вызывать так же и из кода на C++, Python, C#, и т.д.
Для управления линиями GPIO из терминала необходимо использовать инструменты командной строки, предоставляемые libgpiod. Библиотеку libgpiod и инструменты управления GPIO можно установить скомпилировать из исходного текста и установить.
Установка библиотеки libgpiod и инструментов управления GPIO
Репозитарий библиотеки libgpiod доступ по адресу libgpiod/libgpiod.git. В разделе Download опубликованы релизы библиотеки. На 28.04.2021 последний релиз: v1.6.3.
Библиотеку libgpiod можно установить из репозитария дистрибутива, но скорее всего будет доступна старая версия. Установка libgpiod:
$ sudo apt-get update
$ sudo apt-get install -y libgpiod-dev gpiod
Для установки последней актуальной версии необходимо выполнить скрипт установки, который возьмет последнюю версию библиотеки из исходного репозитария. В строке вызова скрипта установки setup-libgpiod-arm64.sh, в качестве первого параметра указать номер версии библиотеки (например: 1.6.3), второй параметр (необязательный) — папка установки скрипта. По умолчанию библиотека установится по пути: /usr/share/libgpiod.
Скрипт установки из исходного текста библиотеки libgpiod и утилит для ARM32/ARM64:
$ cd ~/
$ sudo apt-get update
$ sudo apt-get install -y curl
$ curl -SL --output setup-libgpiod-armv7-and-arm64.sh https://raw.githubusercontent.com/devdotnetorg/dotnet-libgpiod-linux/master/setup-libgpiod-armv7-and-arm64.sh
$ chmod +x setup-libgpiod-armv7-and-arm64.sh
$ sudo ./setup-libgpiod-armv7-and-arm64.sh 1.6.3
Для удаления библиотеки выполнить скрипт: remove-libgpiod-armv7-and-arm64.sh
Если по итогу выполнения скрипта появится надпись «Successfully», то значит библиотека и утилиты успешно установлены. Дополнительно для проверки, можно вызвать команду с выводом номера версии библиотеки:
root@bananapim64:~# gpiodetect -v
gpiodetect (libgpiod) v1.6.3
Copyright (C) 2017-2018 Bartosz Golaszewski
License: LGPLv2.1
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law.
Инструменты библиотеки libgpiod
Команда gpiodetect выведет список всех чипов GPIO, их метки и количество линий. Результат выполнения команды:
root@bananapim64:~# gpiodetect
gpiochip0 [1f02c00.pinctrl] (32 lines)
gpiochip1 [1c20800.pinctrl] (256 lines)
gpiochip2 [axp20x-gpio] (2 lines)
gpiochip0 и gpiochip1, это чипы входящие в состав SoC Allwinner A64. gpiochip1 имеет выход на 40-контактный разъем совместимый с Raspberry Pi. Чип gpiochip2 — отдельная микросхема управления электропитанием axp209 подключенная по интерфейсу I2C.
Для вывод справки к вызываемой команде необходимо добавлять параметр "--help". Вызов справки для команды gpiodetect. Результат выполнения команды:
root@bananapim64:~# gpiodetect --help
Usage: gpiodetect [OPTIONS]
List all GPIO chips, print their labels and number of GPIO lines.
Options:
-h, --help: display this message and exit
-v, --version: display the version and exit
Команда gpioinfo выведет информацию о линиях GPIO конкретного контроллера GPIO (или всех контроллеров GPIO, если они не указаны). Результат выполнения команды:
root@bananapim64:~# gpioinfo 1
gpiochip1 - 256 lines:
line 0: unnamed unused input active-high
...
line 64: unnamed "dc" output active-high [used]
...
line 68: unnamed "backlightlcdtft" output active-high [used]
...
line 96: unnamed "spi0 CS0" output active-low [used]
line 97: unnamed unused input active-high
line 98: unnamed unused input active-high
line 99: unnamed unused input active-high
line 100: unnamed "reset" output active-low [used]
...
line 120: unnamed "bananapi-m64:red:pwr" output active-high [used]
...
line 254: unnamed unused input active-high
line 255: unnamed unused input active-high
В таблице по колонкам указано: номер линии, название контакта, направление ввода/вывода, текущее состояние. Сейчас к Banana Pi BPI-M64 подключен LCD экран ILI9341 на SPI интерфейсе, для подключения используется вариант с управляемой подсветкой, файл DTS sun50i-a64-spi-ili9341-backlight-on-off.dts. В DTS файле контакт «PC4» GPIO68 обозначен для управления подсветкой, название «backlightlcdtft». Соответственно в выводе команды, указан номер линии 68, название «backlightlcdtft», направление — вывод, текущее состояние — active-high (включено).
Команда gpioset установит значение для линии GPIO. Например, следующая команда попытается выключить подсветку на LCD ILI9341. Команда: gpioset 1 68=0, где 1 — gpiochip1, 68 — номер линии(контакта), 0 — логическое значение, может быть «0» или «1». Результат выполнения команды:
root@bananapim64:~# gpioset 1 68=0
gpioset: error setting the GPIO line values: Device or resource busy
root@bananapim64:~#
В результате мы получим ошибку — линия занята, т.к. данная линия занята драйвером «gpio-backlight».
Попробуем включить светодиод на линии 36, название «PB4», номер контакта на 40-контактном разъеме (совместимый с Raspberry Pi) — №33. Результат выполнения команды:
root@bananapim64:~# gpioset 1 36=1
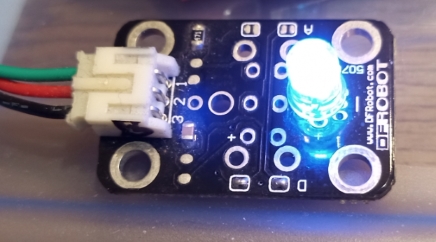
В результате выполнения команды, светодиод включится.
Команда gpioget считывает текущее состояние линии GPIO. Результат выполнения команды:
root@bananapim64:~# gpioget 1 36
1
Получили значение «1», т.к. до этого включили светодиод командой gpioset.
Команда gpiomon будет осуществлять мониторинг состояния линии GPIO и выводить значение при изменение состояния. Будем мониторить состояние кнопки, которая подключена на линию 38, название «PB4», номер контакта на 40-контактном разъеме (совместимый с Raspberry Pi) №35. Команда: gpiomon 1 38, где 1 — gpiochip1, 38 — номер линии (контакта). Результат выполнения команды:
root@bananapim64:~# gpiomon 1 38
event: RISING EDGE offset: 38 timestamp: [ 122.943878429]
event: FALLING EDGE offset: 38 timestamp: [ 132.286218099]
event: RISING EDGE offset: 38 timestamp: [ 137.639045559]
event: FALLING EDGE offset: 38 timestamp: [ 138.917400584]
Кнопка несколько раз нажималась. RISING — повышение, изменение напряжения с 0V до 3.3V, кнопка нажата и удерживается состояние. FALLING — понижение, изменение напряжения с 3.3V до 0V, происходит отпускание кнопки, и кнопка переходит в состояние «не нажата».
С механической кнопкой возникла проблема из-за дребезга контакта, регистрировались множественные нажатия вместо одного. Поэтому механическая кнопка была заменена на емкостную (touch) кнопку.
Установка .NET 5.0 для ARM
Одно из лучших нововведений в .NET 5.0 стало увеличение производительности для архитектуры ARM64. Поэтому переход на новую версию не только увеличит производительность решения на базе ARM64, но и увеличит время автономной работы в случае использования аккумуляторной батареи.
Определение архитектуры ARM32 и ARM64 для SoC
.NET 5 устанавливается на одноплатный компьютер в соответствие с архитектурой SoC:
- ARM32, ARMv7, aarch32, armhf — 32-разрядная архитектура ARM. Первые процессоры ARM для встраиваемых систем разрабатывались именно на этой архитектуре. По заявлению компании ARM Holding, в 2022 поддержка 32-битных платформ прекратится, и будет поддерживаться только 64-битная архитектура. Это означает, что компания не будет поддерживать разработку ПО для 32-битных систем. Если конечный производитель устройства пожелает установить 32-битную ОС, то ему придется самостоятельно заняться портированием драйверов с 64-битной архитектуры на 32-битную.
- ARM64, ARMv8, aarch64 — 64-разрядная архитектура ARM. Ядра Cortex-A53 и Cortex-A57, поддерживающие ARMv8, были представлены компанией ARM Holding 30 октября 2012 года.
Плата Banana Pi BPI-M64 построена на основе процессора Allwinner A64, содержит в себе 64-битные ядра Cortex-A53, поэтому поддерживает 64-разрядные приложения. Для платы Banana Pi BPI-M64 используется 64-разрядный образ ОС Armbian, поэтому на плату будем устанавливать .NET для 64-разрядных систем ARM.
Плата Cubietruck построена на основе процессора Allwinner A20 содержит в себе 32-битные ядра Cortex-A7, поэтому поддерживает только 32-разрядные приложения. Соответственно на плату устанавливается .NET для 32-разрядных систем.
Если вы не знаете какую версию .NET установить на одноплатный компьютер, то необходимо выполнить команду для получения информации об архитектуре системы: uname -m.
Выполним команду на Banana Pi BPI-M64:
root@bananapim64:~# uname -m
aarch64
Строка aarch64 говорит о 64-разрядной архитектуре ARM64, ARMv8, aarch64, поэтому установка .NET для 64-х разрядных ARM систем.
Выполним команду на Cubietruck:
root@cubietruck:~# uname -m
armv7l
Строка armv7l говорит о 32-разрядной архитектуре ARM32, ARMv7, aarch32, armhf, поэтому установка .NET для 32-разрядных ARM систем.
Редакции .NET 5.0 на ARM
.NET 5.0 можно устанавливать в трех редакциях:
- .NET Runtime — содержит только компоненты, необходимые для запуска консольного приложения.
- ASP.NET Core Runtime — предназначен для запуска ASP.NET Core приложений, так же включает в себя .NET Runtime для запуска консольных приложений.
- SDK — включает в себя .NET Runtime, ASP.NET Core Runtime и .NET Desktop Runtime. Позволяет кроме запуска приложений, компилировать исходный код на языках C# 9.0, F# 5.0, Visual Basic 15.9.
Для запуска .NET программ достаточно установки редакции .NET Runtime, т.к. компиляция проекта будет на компьютере x86.
Загрузить .NET с сайта Microsoft можно по ссылке Download .NET 5.0.
Установка .NET Runtime
На странице Download .NET 5.0. можно узнать текущую актуальную версию .NET. В первой колонке Release information будет указана версия: v5.0.5 Released 2021-04-06. Версия номер: 5.0.5. В случае выхода более новый версии .NET, ниже в скрипте в строке export DOTNET_VERSION=5.0.5, нужно будет заменить номер версии на последний. Выполним скрипт установки, в зависимости от разрядности системы ARM32 (Cubietruck) или ARM64(Banana Pi BPI-M64):
ARM64
$ cd ~/
$ apt-get update && apt-get install -y curl
$ export DOTNET_VERSION=5.0.5
$ curl -SL --output dotnet.tar.gz https://dotnetcli.azureedge.net/dotnet/Runtime/$DOTNET_VERSION/dotnet-runtime-$DOTNET_VERSION-linux-arm64.tar.gz \
&& mkdir -p /usr/share/dotnet \
&& tar -ozxf dotnet.tar.gz -C /usr/share/dotnet \
&& rm dotnet.tar.gz
$ ln -s /usr/share/dotnet/dotnet /usr/bin/dotnet
ARM32
$ cd ~/
$ apt-get update && apt-get install -y curl
$ export DOTNET_VERSION=5.0.5
$ curl -SL --output dotnet.tar.gz https://dotnetcli.azureedge.net/dotnet/Runtime/$DOTNET_VERSION/dotnet-runtime-$DOTNET_VERSION-linux-arm.tar.gz \
&& mkdir -p /usr/share/dotnet \
&& tar -ozxf dotnet.tar.gz -C /usr/share/dotnet \
&& rm dotnet.tar.gz
$ ln -s /usr/share/dotnet/dotnet /usr/bin/dotnet
Проверим запуск .NET, командой (результат одинаков для Banana Pi BPI-M64 и Cubietruck): dotnet --info
root@bananapim64:~# dotnet --info
Host (useful for support):
Version: 5.0.5
Commit: 2f740adc14
.NET SDKs installed:
No SDKs were found.
.NET runtimes installed:
Microsoft.NETCore.App 5.0.5 [/usr/share/dotnet/shared/Microsoft.NETCore.App]
To install additional .NET runtimes or SDKs:
https://aka.ms/dotnet-download
.NET установлен в системе, для запуска приложений в Linux необходимо воспользоваться командой: dotnet ConsoleApp1.dll
Обновление .NET 5.0
При выходе новых версий .NET необходимо сделать следующее:
- Удалить папку /usr/share/dotnet/
- Выполнить скрипт установки, указав новую версию .NET в строке export: DOTNET_VERSION=5.0.5. Номер последней версии .NET можно посмотреть на странице Download .NET 5.0. Строку скрипта создания символической ссылки выполнять не надо: ln -s /usr/share/dotnet/dotnet /usr/bin/dotnet
Удаленная отладка приложения на .NET 5.0 в Visual Studio Code для ARM
Удаленная отладка в Visual Studio Code позволяет в интерактивном режиме видеть ошибки и просматривать состояние переменных, без необходимости постоянного ручного переноса приложения на одноплатный компьютер, что существенно облегчает разработку. Бинарные файлы копируются в автоматическом режиме с помощью утилиты Rsync. Для работы с GPIO, настройка удаленной отладки не является обязательной задачей. Более подробно можно почитать в публикации Удаленная отладка приложения на .NET 5.0 в Visual Studio Code для ARM на примере Banana Pi BPI-M64 и Cubietruck (Armbian, Linux).
Создание первого приложения для управления (вкл/выкл светодиода) GPIO на C#, аналог утилиты gpioset
Поздравляю тебя %habrauser%! Мы уже подходим к финалу, осталось буквально чуть-чуть. Разрабатывать и компилировать приложение будем на x86 компьютере в в Visual Studio Code. Находясь в этой точке, подразумевается, что на одноплатном компьютере уже установлена платформа .NET 5 и библиотека Libgpiod, а на компьютере x86 .NET 5 и Visual Studio Code. Итак приступаем:
Шаг 1 — Создание приложения dotnet-gpioset
Действия выполняются на x86 компьютере. В командной строке создаем проект с названием dotnet-gpioset: dotnet new console -o dotnet-gpioset, где dotnet-gpioset — название нового проекта. Результат выполнения команды:
D:\Anton\Projects>dotnet new console -o dotnet-gpioset
Getting ready...
The template "Console Application" was created successfully.
Processing post-creation actions...
Running 'dotnet restore' on dotnet-gpioset\dotnet-gpioset.csproj...
Определение проектов для восстановления...
Восстановлен D:\Anton\Projects\dotnet-gpioset\dotnet-gpioset.csproj (за 68 ms).
Restore succeeded.
После выполнения команды будет создана папка \Projects\dotnet-gpioset\, в этой папке будет расположен наш проект: папка — obj, файл программы — Program.cs и файл проекта — dotnet-gpioset.csproj.
Шаг 2 — Установка расширения C# for Visual Studio Code (powered by OmniSharp) для Visual Studio Code
Запустим Visual Studio Code и установим расширение C# for Visual Studio Code (powered by OmniSharp), для возможности работы с кодом на C#. Для этого нажмем на закладке: 1. Extensions, затем 2. в поле ввода напишем название расширения C# for Visual Studio Code, выберем пункт 3. C# for Visual Studio Code (powered by OmniSharp). 4. Перейдем на страницу описание расширения и нажмем на кнопку Install.
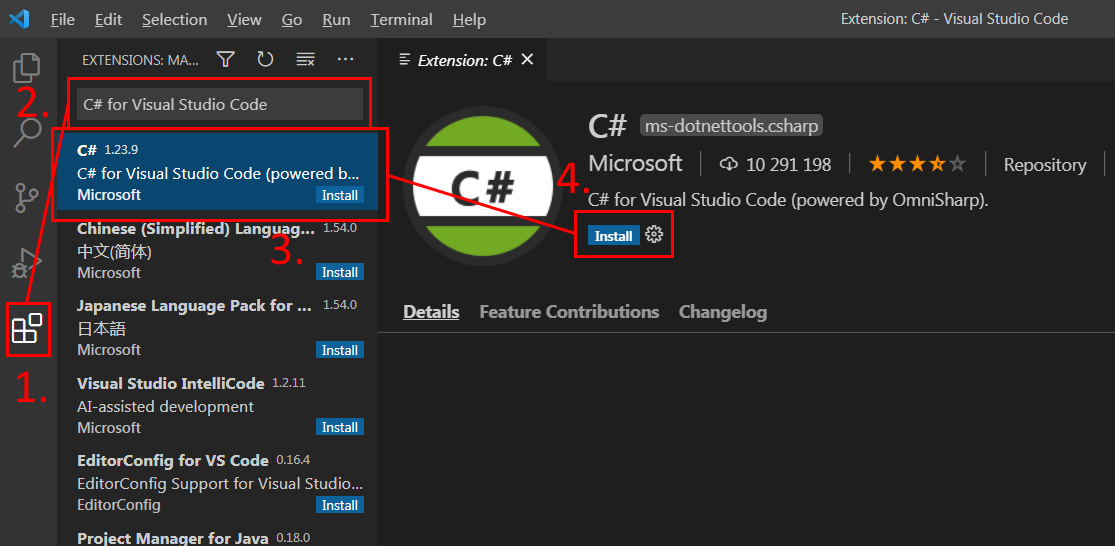
C# for Visual Studio Code (powered by OmniSharp)
После установки можно выполнить настройку расширения.
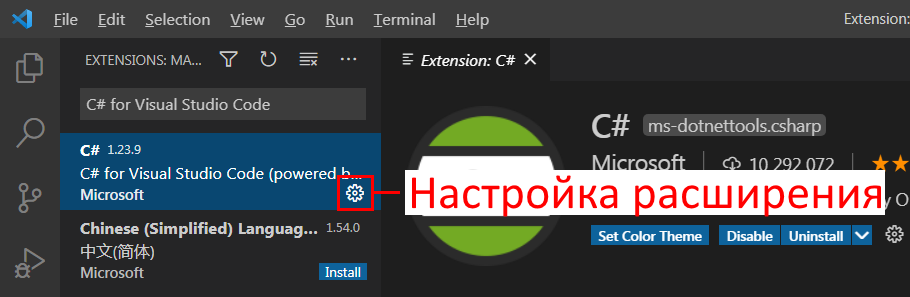
Настройка расширения C# for Visual Studio Code
После установки расширения, перезапустим Visual Studio Code.
Шаг 3 — Открытие проекта в Visual Studio Code и добавление NuGet пакетов
Откроем проект в Visual Studio Code. Меню: File =>Open Folder, и выберем папку с проектом \Projects\dotnet-gpioset\
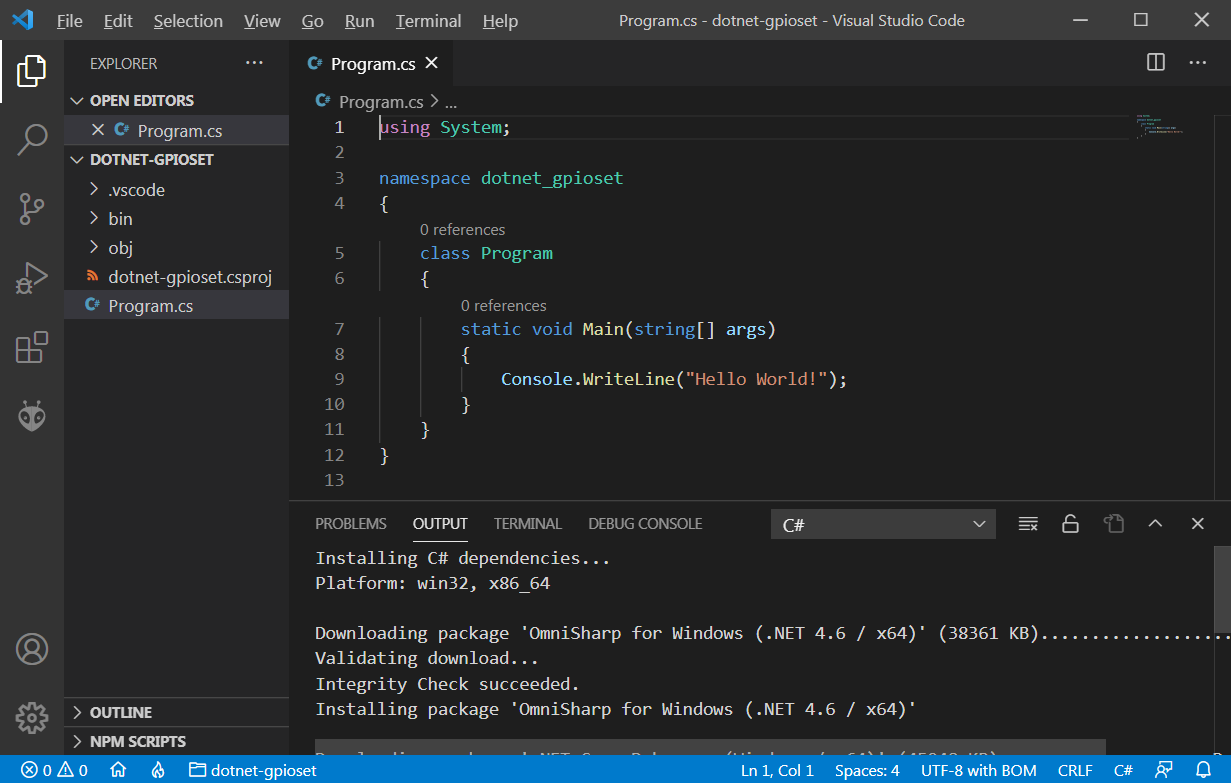
Проект в Visual Studio Code
Откроем файл dotnet-gpioset.csproj, убедимся что версия .NET выставлена верно, должно быть следующее содержание:
Содержание файла dotnet-gpioset.csproj
NuGet пакеты можно добавить через командную строку или расширение NuGet Package Manager. Установим данное расширение, и добавим пакеты: Iot.Device.Bindings и System.Device.Gpio. Для этого нажмем комбинацию Ctrl+Shift+P, затем в поле введем: Nuget, выберем Nuget Packet Managet: Add Package.
Запуск расширения NuGet Package Manager
В поле ввода укажем название пакета Iot.Device.Bindings, нажмем Enter, затем выберем версию 1.4.0 и нажмем Enter. Так же сделать и для пакета System.Device.Gpio. В результате добавление пакетов, содержимое файла dotnet-gpioset.csproj должно быть следующим:

Содержание файла dotnet-gpioset.csproj
Шаг 4 — Добавление обработки аргументов в код
Утилита dotnet-gpioset как и оригинальная gpioset будет принимать на вход точно такие же аргументы. Вызов: dotnet-gpioset 1 36=1, включит светодиод на gpiochipX — 1, номер линии — 36, значение — 1. В режиме отладки будут заданы значения по умолчанию int_gpiochip=1, int_pin=36, pin_value = PinValue.High. Подключим пространство имен System.Device.Gpio для использование структуры PinValue.
Обработка входящих аргументов:
static void Main(string[] args)
{
//run: dotnet-gpioset 1 36=1
//-----------------------------------------------
int? int_gpiochip=null,int_pin=null;
PinValue? pin_value=null;
#if DEBUG
Console.WriteLine("Debug version");
int_gpiochip=1;
int_pin=36;
pin_value = PinValue.High;
#endif
if (args.Length==2)
{
//Read args
if (int.TryParse(args[0], out int output)) int_gpiochip = output;
Regex r = new Regex(@"\d+=\d+");//36=1
if (r.IsMatch(args[1])) //check: 36=1
{
var i = args[1].Split("=");
if (int.TryParse(i[0], out output)) int_pin = output;
if (int.TryParse(i[1], out output))
{
pin_value=(output != 0) ? PinValue.High : PinValue.Low;
}
}
}
Console.WriteLine($"Args gpiochip={int_gpiochip}, pin={int_pin}, value={pin_value}");
//next code
Console.WriteLine("Hello World!");
}
Запускаем выполнение кода для проверки, меню Run => Start Debugging, все работает отлично!
Загружено "C:\Program Files\dotnet\shared\Microsoft.NETCore.App\5.0.5\System.Text.Encoding.Extensions.dll". Загрузка символов пропущена. Модуль оптимизирован, включен параметр отладчика "Только мой код".
Debug version
Args gpiochip=1, pin=36, value=High
Hello World!
Программа "[8528] dotnet-gpioset.dll" завершилась с кодом 0 (0x0).
Шаг 5 — Добавление контроллера управления GPIO c драйвером LibGpiodDriver
Для управления GPIO необходимо создать объект GpioController и указать драйвер LibGpiodDriver, для этого добавим пространство имен System.Device.Gpio.Drivers.
Добавление контроллера:
//next code
GpioController controller;
var drvGpio = new LibGpiodDriver(int_gpiochip.Value);
controller = new GpioController(PinNumberingScheme.Logical, drvGpio);
Описание кода:
- GpioController — класс контроллера для управления контактами GPIO;
- LibGpiodDriver(int_gpiochip.Value) — драйвер обертки библиотеки Libgpiod, в качестве аргумента указываем номер gpiochip;
- GpioController(PinNumberingScheme.Logical, drvGpio) — инициализация контроллера, PinNumberingScheme.Logical — формат указания контактов. Есть два варианта, по названию контакта или по его номеру. Но т.к. названия контактов не заданы, то обращение будет только по номеру.
Шаг 6 — Управление контактом GPIO
Добавление кода для задания значения контакту:
//set value
if(!controller.IsPinOpen(int_pin.Value))
{
controller.OpenPin(int_pin.Value,PinMode.Output);
controller.Write(int_pin.Value,pin_value.Value);
}
Описание кода:
- controller.IsPinOpen — проверка открытия контакта, может быть занят или недоступен;
- controller.OpenPin — открытие контакта и задание ему режима работы, PinMode.Output на вывод;
- controller.Write(int_pin.Value,pin_value.Value) — выставление контакту int_pin значение pin_value.
Шаг 7 — Публикация для архитектуры ARM
Открыть командную строку, и перейти в папку \Projects\dotnet-gpioset\.
Для ARM32 выполнить команду:
- параметр --runtime — задает архитектуру выполнения программы (берется из списка Runtime Identifiers (RIDs));
- параметр --self-contained — указывает на необходимость добавление в каталог всех зависимых сборок .NET, при выставление значение в False, копируются только дополнительные сборки не входящие в .NET Runtime (в данном случае будут скопированы сборки из дополнительных NuGet пакетов).
dotnet publish dotnet-gpioset.csproj --configuration Release --runtime linux-arm --self-contained false
Файлы для переноса на одноплатный компьютер будут в папке: \Projects\dotnet-gpioset\bin\Release\net5.0\linux-arm\publish\.
Для ARM64 выполнить команду:
dotnet publish dotnet-gpioset.csproj --configuration Release --runtime linux-arm64 --self-contained false
Файлы для переноса на одноплатный компьютер будут в папке: \Projects\dotnet-gpioset\bin\Release\net5.0\linux-arm64\publish\.
Шаг 8 — Перенос папки \publish\
Содержимое папки \publish\ необходимо перенести в домашний каталог Linux пользователя на одноплатном компьютере. Это можно сделать используя терминал MobaXterm.
Шаг 9 — Запуск dotnet-gpioset на одноплатном компьютере
Содержимое папки \publish\ было скопировано в папку /root/publish-dotnet-gpioset. Исполняемым файлом будет файл с расширением *.dll. В самом начале, светодиод был подключен на контакт №33, 40-контактного разъема совместимого с Raspberry P, название контакта «PB4», номер линии — 36. Поэтому в качестве аргумента номера контакта указываем — 36. Для запуска программы необходимо выполнить команду:
dotnet dotnet-gpioset.dll 1 36=1
Результат выполнения команды:
root@bananapim64:~# cd /root/publish-dotnet-gpioset
root@bananapim64:~/publish-dotnet-gpioset# dotnet dotnet-gpioset.dll 1 36=1
Args gpiochip=1, pin=36, value=High
OK
Светодиод включился!
Проект доступен на GitHub dotnet-gpioset.
Создание приложения обработки прерывания от кнопки
Теперь реализуем программу обработки прерываний от GPIO. Задача будет заключаться в переключение светодиода по нажатию кнопки. Первое нажатие кнопки включит светодиод, последующее, выключит светодиод, и так до бесконечности. Программа основана на примере Push button.
Светодиод подключен контакту с номером — 36. Кнопка подключена на контакт с номером — 38. Итак приступаем:
Шаг 1 — Создание приложения dotnet-led-button
Действия выполняются на x86 компьютере. В командной строке создаем проект с названием dotnet-led-button: dotnet new console -o dotnet-led-button, где dotnet-led-button — название нового проекта.
D:\Anton\Projects>dotnet new console -o dotnet-led-button
Getting ready...
The template "Console Application" was created successfully.
Processing post-creation actions...
Running 'dotnet restore' on dotnet-led-button\dotnet-led-button.csproj...
Определение проектов для восстановления...
Восстановлен D:\Anton\Projects\dotnet-led-button\dotnet-led-button.csproj (за
76 ms).
Restore succeeded.
После выполнения команды будет создана папка с файлами проекта \Projects\dotnet-led-button\.
Шаг 2 — Открытие проекта в Visual Studio Code и добавление NuGet пакетов
Точно так же, как и в предыдущем проекте добавим Nuget пакеты: Iot.Device.Bindings и System.Device.Gpio.
Шаг 3 — Добавление контроллера управления GPIO c драйвером LibGpiodDriver
Добавим контроллер для управления GPIO, и выставим режим работы контактов:
private const int GPIOCHIP = 1;
private const int LED_PIN = 36;
private const int BUTTON_PIN = 38;
private static PinValue ledPinValue = PinValue.Low;
static void Main(string[] args)
{
GpioController controller;
var drvGpio = new LibGpiodDriver(GPIOCHIP);
controller = new GpioController(PinNumberingScheme.Logical, drvGpio);
//set value
if(!controller.IsPinOpen(LED_PIN)&&!controller.IsPinOpen(BUTTON_PIN))
{
controller.OpenPin(LED_PIN,PinMode.Output);
controller.OpenPin(BUTTON_PIN,PinMode.Input);
}
controller.Write(LED_PIN,ledPinValue); //LED OFF
Описание кода:
- controller.OpenPin(LED_PIN,PinMode.Output) - открывает контакт светодиода, и выставляет режим работы на — вывод;
- controller.OpenPin(BUTTON_PIN,PinMode.Input) - открывает контакт кнопки, и выставляет режим работы на — ввод (сигнал поступает от кнопки.
Шаг 4 — Добавление обработки прерывания кнопки
Обработка прерывания реализуется путем добавление Callback на изменение состояние контакта. Callback регистрируется в контроллере GPIO:
controller.RegisterCallbackForPinValueChangedEvent(BUTTON_PIN,PinEventTypes.Rising,(o, e) =>
{
ledPinValue=!ledPinValue;
controller.Write(LED_PIN,ledPinValue);
Console.WriteLine($"Press button, LED={ledPinValue}");
});
Описание кода:
- RegisterCallbackForPinValueChangedEvent — регистрация Callback на контакт BUTTON_PIN, будет срабатывать при нажатие на кнопку — Rising. Так же доступно срабатывание на событие отпускание кнопки.
Шаг 5 — Публикация для архитектуры ARM
Открыть командную строку, и перейти в папку \Projects\dotnet-led-button\.
Для ARM32 выполнить команду:
dotnet publish dotnet-led-button.csproj --configuration Release --runtime linux-arm --self-contained false
Файлы для переноса на одноплатный компьютер будут в папке: \Projects\dotnet-led-button\bin\Release\net5.0\linux-arm\publish\.
Для ARM64 выполнить команду:
dotnet publish dotnet-led-button.csproj --configuration Release --runtime linux-arm64 --self-contained false
Файлы для переноса на одноплатный компьютер будут в папке: \Projects\dotnet-led-button\bin\Release\net5.0\linux-arm64\publish\.
Шаг 6 — Перенос папки \publish\
Содержимое папки \publish\ необходимо перенести в домашний каталог Linux пользователя на одноплатном компьютере.
Шаг 7 — Запуск dotnet-led-button на одноплатном компьютере
Содержимое папки \publish\ было скопировано в папку /root/publish-dotnet-led-button. Для запуска программы необходимо выполнить команду:
dotnet dotnet-led-button.dll
Результат выполнения команды:
root@bananapim64:~/publish-dotnet-led-button# dotnet dotnet-led-button.dll
CTRL+C to interrupt the read operation:
Press any key, or 'X' to quit, or CTRL+C to interrupt the read operation:
Press button, LED=Low
Press button, LED=High
Press button, LED=Low
Press button, LED=High
Press button, LED=Low
Кнопка работает!
Проект доступен на GitHub dotnet-led-button.
Теперь поговорим о скорости
Замеры скорости управления GPIO на Banana Pi BPI-M64 не проводились из-за отсутствия осциллографа. Но не так давно, пользователь ZhangGaoxing опубликовал результаты замеров скорости на Orange Pi Zero: ОС Armbian buster, ядро Linux 5.10.16, .NET 5.0.3. Тест заключался в быстром переключение контакта GPIO с «0» на «1» и наоборот, по сути осуществлялась генерация сигнала ШИМ (в Arduino аналог SoftPWM). Чем больше частота, тем быстрее переключатся контакт. Для замера был разработан проект SunxiGpioDriver.GpioSpeed. ZhangGaoxing для доступа к контактам разработал драйвер SunxiDriver, который напрямую обращается к регистрам памяти для управления GPIO. Код этого драйвера так же можно адаптировать к любой плате, путем изменения адресов регистров памяти из datasheet к процессору. Минус такого подхода заключается в отсутствие контроля к GPIO со стороны ОС, можно «влезть» в контакт используемой ОС и вызвать сбой работы.
Таблица замеров:
| Драйвер | Язык | Версия библиотеки | Средняя частота | |
| SunxiDriver | C# | - | 185 KHz | 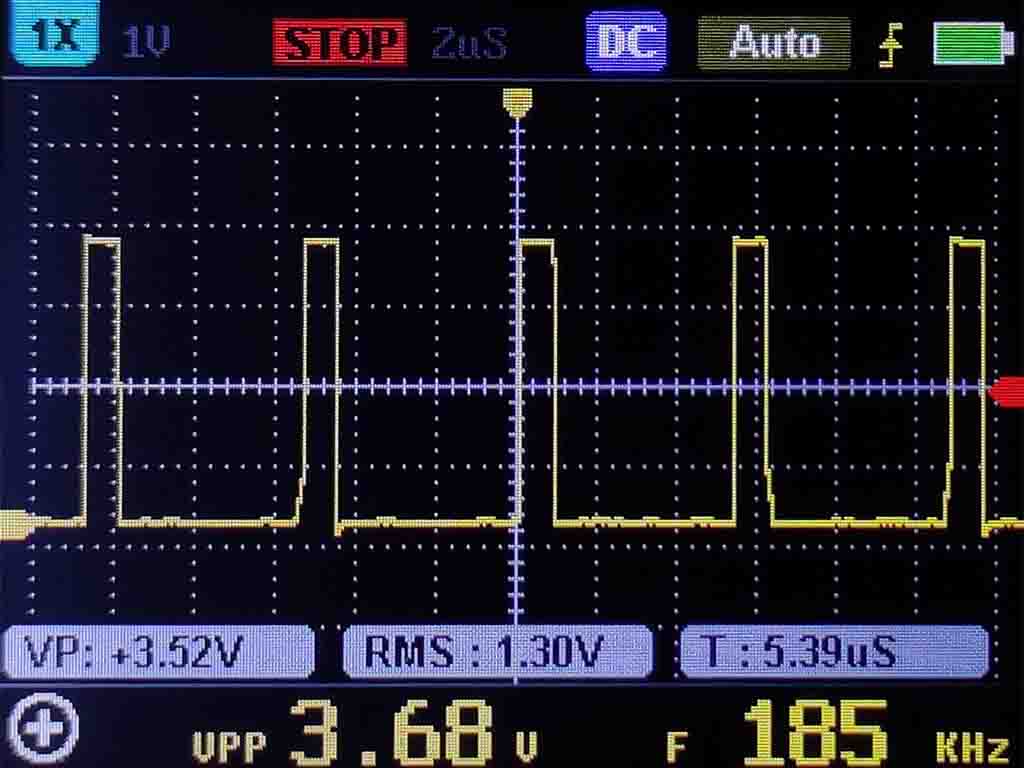 |
| SysFsDriver | C# | System.Device.Gpio 1.3.0 | 692 Hz | 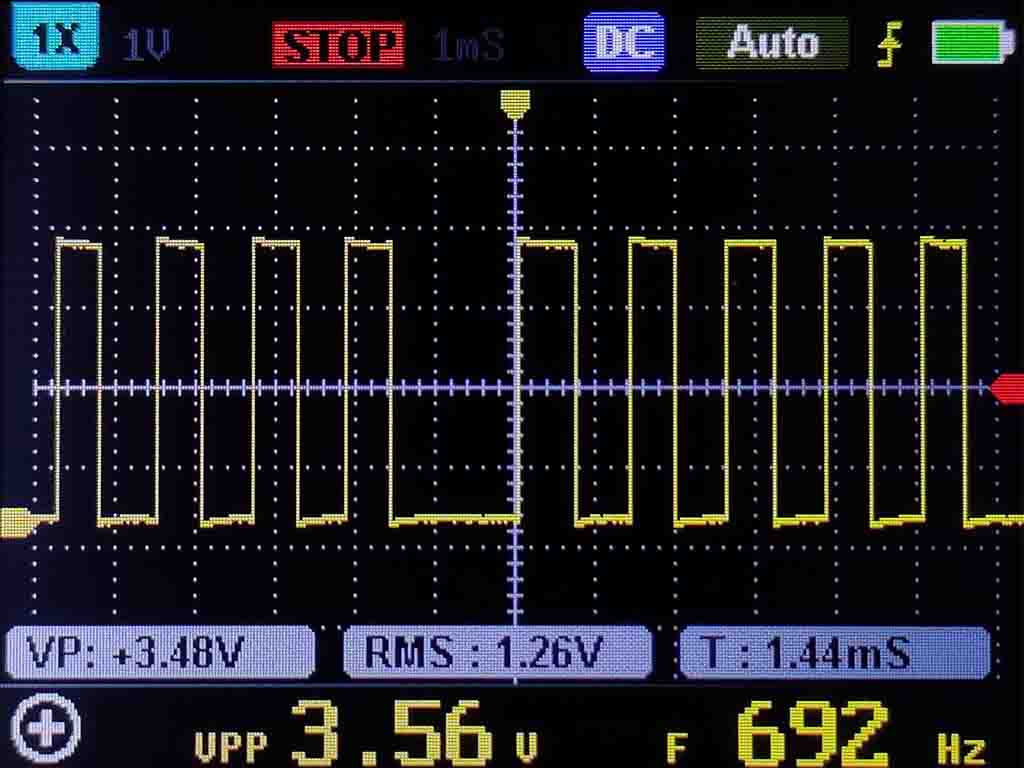 |
| LibGpiodDriver | C# | System.Device.Gpio 1.3.0 libgpiod 1.2-3 |
81 KHz | 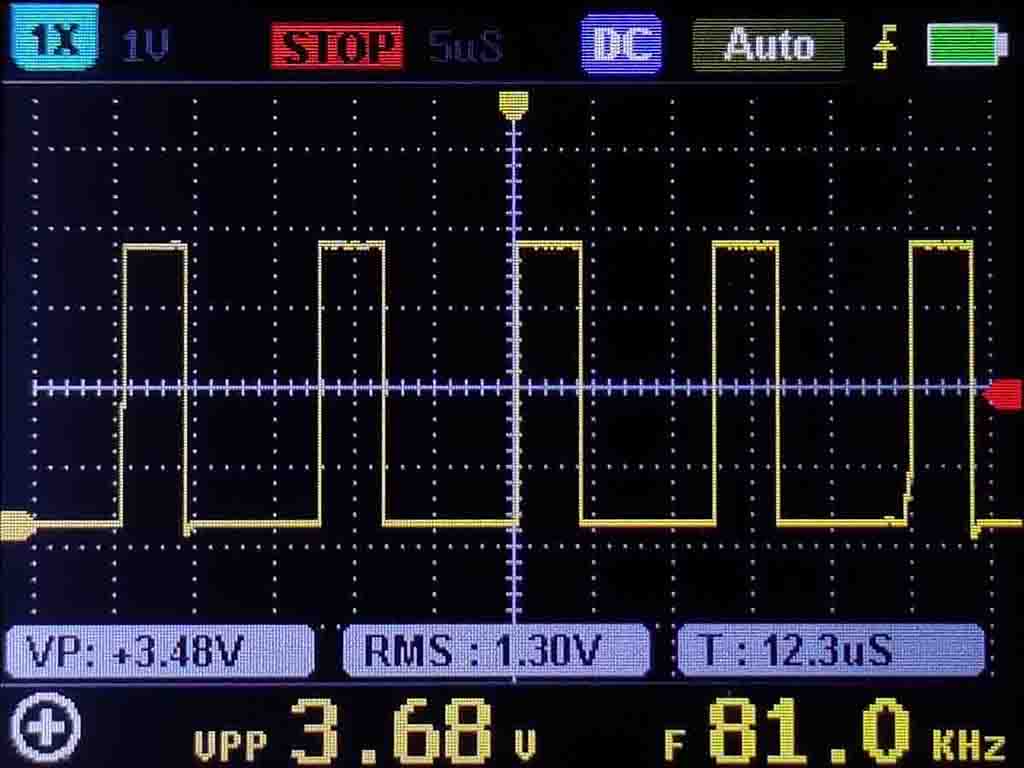 |
| wiringOP | C | 35de015 | 1.10 MHz | 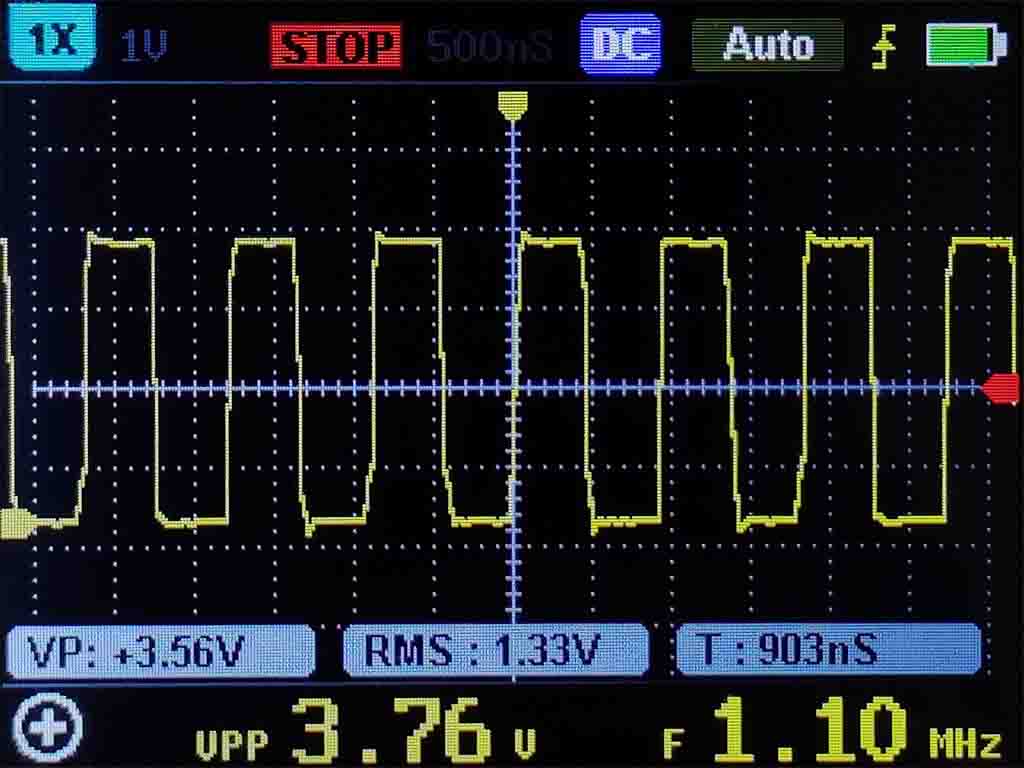 |
Результаты подтвердили, что самым медленным интерфейсом является SysFs, и его не стоит использовать для серьезных проектов. wiringOP является С оберткой доступа к GPIO. Непосредственно управление GPIO из C кода существенно быстрее, чем из приложения на .NET, разница скорости в ~13 раз. Это и есть плата за Runtime.
Итог
Управлять контактами GPIO в C# оказалось не сложнее чем на Arduino. В отличие от Arduino в нашем распоряжение Linux с поддержкой полноценной графики, звуком, и большими возможностями подключения различной периферии. В далеком 2014 году с хабровчанином prostosergik был спор о целесообразности использовании Raspberry Pi в качестве школьного звонка. Мною был реализован подобный функционал на C# .NET Micro Framework, отладочная плата FEZ Domino. С того времени многое что изменилось. Сейчас вариант использования для подобных индивидуальных задач, одноплатных компьютеров на Linux более оправдан, чем использование микроконтроллера. Первое существенное изменение это — .NET теперь работает на Linux нативно. Второе — появились библиотеки которые упрощают и скрывают под капотом все сложную работу. Третье — цена, сейчас одноплатный компьютер с 256 Мб ОЗУ, Ethernet и Wi-Fi в известном китайском магазине можно приобрести за 18$. За такие деньги МК, с поддержкой полноценного Web-интерфейса и шифрования сетевого трафика, вряд ли найдешь. Платформа .NET IoT позволяет работать с GPIO на достаточно высоком уровне абстракции, что существенно снижает порог вхождения. В результате любой разработчик .NET платформы, может с легкостью реализовать свое решение для IoT не вдаваясь в детали как это работает внутри. Установка платформы .NET и библиотеки Libgpiod было приведено для понимания, как это работает, но такой подход не является самым удобным. Гораздо удобнее все разворачивать в Docker контейнере, тем более это mainstream для Linux. В продолжении посмотрим как упаковывать приложение на C# вместе с .NET 5 и Libgpiod в один контейнер, для дальнейшей удобной дистрибьюции нашего решения потенциальному клиенту, задействуем LCD для вывода информации из .NET кода.
На правах рекламы
Прямо сейчас вы можете заказать мощные серверы, которые используют новейшие процессоры AMD Epyc. Гибкие тарифы — от 1 ядра CPU до безумных 128 ядер CPU, 512 ГБ RAM, 4000 ГБ NVMe.
Подписывайтесь на наш чат в Telegram.