Comments 23
UFO just landed and posted this here
Одометрию пришлось дописывать в прошивке. Эти данные есть с холлов, вывели их через serial на arduino.
Коммутация векторная, по видимому.
С напечатанными креплениями выдерживает больше. ABS с 90% заполнением.
На GIT разместим.
Корпус из АМГ будет дороже.
Коммутация векторная, по видимому.
С напечатанными креплениями выдерживает больше. ABS с 90% заполнением.
На GIT разместим.
Корпус из АМГ будет дороже.
Эти данные есть с холлов
Не сравниваете с данными с драйвера, чтобы детектировать пробуксовку?
Данные мы и получаем с драйвера. Пробуксовку не детектировали. Можно с IMU сравнивать.
С датчика холла, сколько сигналов(частота) получаете на метр пути? по моему сильно меньше 40, и это явно не достаточно.
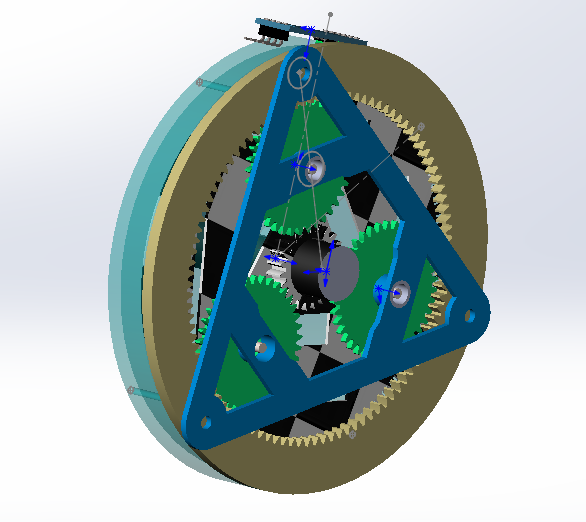
2 года назад экспериментировал с мотором и энкодером из набора ардуино, скорость была рывками, разобрав робот пылесос румбу, там поступало >~1000 сигналов на метр. По этому на для полноразмерного робота(т.е. тоже на мотор-колесах) «изобретал» планетарный редуктор, но не доделал(
2 года назад экспериментировал с мотором и энкодером из набора ардуино, скорость была рывками, разобрав робот пылесос румбу, там поступало >~1000 сигналов на метр. По этому на для полноразмерного робота(т.е. тоже на мотор-колесах) «изобретал» планетарный редуктор, но не доделал(

Извините, а почему ставят лидар, но не ставят в качестве основного органа чувств камеры?
UFO just landed and posted this here
А зачем тебе такая аццкая штука? 30 кило шариков гольфовых — многовато
Спасибо за статью.
Рассматривалась ли платформа от Nvidia? В частности, у них есть готовая платформа Casper, с Segway в качестве тележки (немного перебор по грузоподъёмности, но если вы собираетесь заниматься этим серьёзно — в будущем пригодится).
И ещё вопрос — проверяли/сравнивали Jetson Nano — там и ROS бежит, и вроде готовые решения есть для ориентации по стереокамере. Почему RPi? Не обойдётся ли в итоге дороже?
В любом случае, подписывюсь и — удачи!!
UFO just landed and posted this here
UFO just landed and posted this here
Так ездит робот или вы там по Газебо гоняете? )
Sign up to leave a comment.
ROS: Застрявшим в Gazebo посвящается… Платформа для робота за 28.000 руб